一种车辆航迹预测方法、装置、设备及存储介质与流程
本发明涉及汽车航迹预测,尤其涉及一种车辆航迹预测方法、装置、设备及存储介质。
背景技术:
1、随着汽车智能化程度的不断提高,车辆航迹预测技术也在不断地发展。在现有技术中,通常采用gps(global positioning system,全球定位系统)传感器等多种传感器直接采集车辆的信息,从而得出车辆的运动轨迹。然而,这种方案在传感器被遮挡或故障时,预测的准确性会大大降低。因此,一种不采用gps传感器等直接获取车辆定位信息的解决方案亟待提出。
技术实现思路
1、本申请实施例提供一种车辆航迹预测方法、装置、设备及存储介质,用以较为准确地预测车辆航迹。
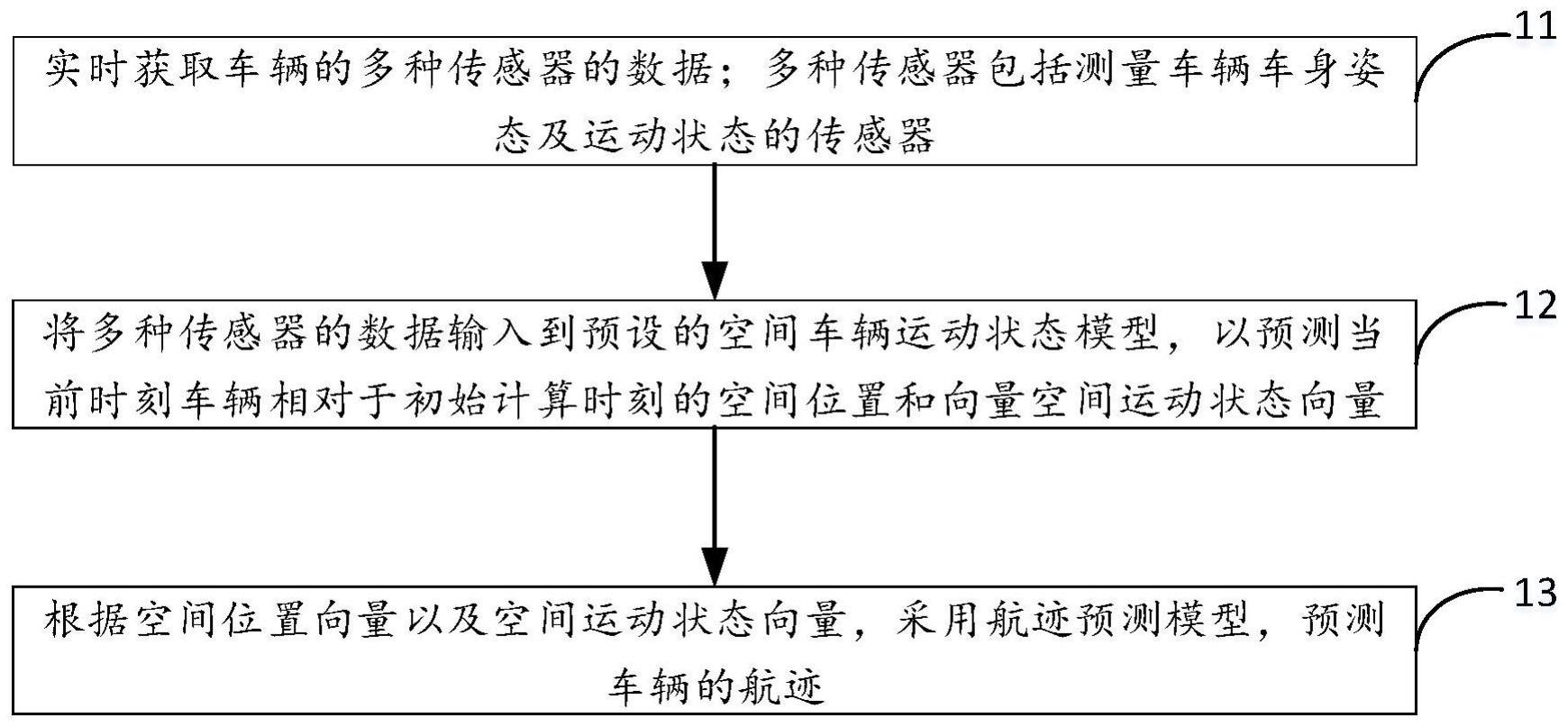
2、本申请实施例提供一种车辆航迹预测方法,包括:实时获取所述车辆的多种传感器的数据;所述多种传感器包括测量车辆车身姿态及运动状态的传感器;将所述多种传感器的数据输入到预设的空间车辆运动状态模型,以预测当前时刻所述车辆相对于初始计算时刻的空间位置向量和空间运动状态向量;根据所述空间位置向量以及所述空间运动状态向量,采用航迹预测模型,预测所述车辆的航迹。
3、进一步可选地,实时获取所述车辆的多种传感器的数据,包括:实时获取所述车辆的多种传感器的初始数据;将所述多种传感器的初始数据输入到预设的数据滤波模型,得到滤波处理后的所述多种传感器的滤波数据;将所述多种传感器的滤波数据输入到预设的数据状态分析模型进行数据筛选操作,得到筛选后的所述多种传感器的数据。
4、进一步可选地,将所述多种传感器的数据输入到预设的空间车辆运动状态模型,以预测当前时刻所述车辆相对于初始计算时刻的空间位置向量和空间运动状态向量,包括:将所述当前时刻以及所述当前时刻的前一时刻对应的多个传感器的数据输入所述空间车辆运动状态模型,得到所述当前时刻相对于所述前一时刻的空间位置变化量以及空间运动状态变化量;根据所述前一时刻相对于所述初始计算时刻的历史空间位置向量以及所述空间位置变化量,计算所述当前时刻相对于所述初始计算时刻的空间位置向量;以及,根据所述前一时刻相对于所述初始计算时刻的历史空间位置向量以及所述空间运动状态变化量,计算所述当前时刻相对于所述初始计算时刻的空间运动状态向量。
5、进一步可选地,根据所述空间位置向量以及所述空间运动状态向量,采用航迹预测模型,预测所述车辆的航迹,包括:确定所述空间位置向量以及所述空间运动状态向量所在的车体坐标系;根据所述车辆的历史定位数据,计算所述车体坐标系与所述车辆的定位系统对应的世界坐标系的对齐关系;所述历史定位数据包括:历史时刻所述车辆的gps数据;根据所述对齐关系,将所述空间位置向量以及所述空间运动状态向量转换到所述世界坐标系中;根据转换到所述世界坐标系中的空间位置向量以及空间运动状态向量,采用所述航迹预测模型,预测所述车辆的航迹。
6、进一步可选地,根据所述空间位置向量以及所述空间运动状态向量,采用航迹预测模型,预测所述车辆的航迹,包括:将所述空间位置向量以及所述空间运动状态向量输入所述航迹预测模型;在所述航迹预测模型中,根据第一道路数据,计算与所述空间位置向量以及所述空间运动状态向量匹配的目标道路;所述第一道路数据包括:至少一条道路的道路位置数据、车道数据、车道方向数据以及路况数据中的至少一种;根据所述目标道路确定所述航迹。
7、进一步可选地,在所述航迹预测模型中,根据第一道路数据,计算与所述空间位置向量以及所述空间运动状态向量匹配的目标道路,包括:将所述空间位置向量、所述空间运动状态向量以及所述第一道路数据输入到基于隐马尔可夫的第一路径匹配模型中;在所述第一路径匹配模型中,根据所述空间位置向量、所述空间运动状态向量以及所述第一道路数据,计算所述车辆位于至少一条候选道路上的概率;将所述空间位置向量、所述空间运动状态向量、所述第一道路数据、所述车辆位于至少一条候选道路上的概率以及所述车辆的历史数据,输入基于深度学习的第二路径匹配模型,以通过所述第二路径匹配模型从所述至少一条候选道路中确定目标道路。
8、进一步可选地,预测所述车辆的航迹之后,还包括:根据所述车辆的航迹,对预测得到的所述空间位置向量进行修正,得到所述车辆在定位系统处于异常状态时的实时位置。
9、本申请实施例提供一种车辆航迹预测方法,包括:存储器以及处理器;其中,所述存储器用于:存储一条或多条计算机指令;所述处理器用于执行所述一条或多条计算机指令,以用于:执行所述车辆航迹预测方法中的步骤。
10、本申请实施例提供一种车辆航迹预测装置,包括:数据获取模块,用于实时获取所述车辆的多种传感器的数据,所述多种传感器包括测量车辆车身姿态及运动状态的传感器;向量预测模块,用于将所述多种传感器的数据输入到预设的空间车辆运动状态模型,以预测当前时刻所述车辆相对于初始计算时刻的空间位置向量和空间运动状态向量;航迹预测模块,用于根据所述空间位置向量以及所述空间运动状态向量,采用航迹预测模型,预测所述车辆的航迹。
11、进一步可选地,所述向量预测模块在将所述多种传感器的数据输入到预设的空间车辆运动状态模型,以预测当前时刻所述车辆相对于初始计算时刻的空间位置向量和空间运动状态向量时,具体用于:将所述当前时刻以及所述当前时刻的前一时刻对应的多个传感器的数据输入所述空间车辆运动状态模型,得到所述当前时刻相对于所述前一时刻的空间位置变化量以及空间运动状态变化量;根据所述前一时刻相对于所述初始计算时刻的历史空间位置向量以及所述空间位置变化量,计算所述当前时刻相对于所述初始计算时刻的空间位置向量;以及,根据所述前一时刻相对于所述初始计算时刻的历史空间运动状态向量以及所述空间运动状态变化量,计算所述当前时刻相对于所述初始计算时刻的空间运动状态向量。
12、进一步可选地,所述航迹预测模块在根据所述空间位置向量以及所述空间运动状态向量,采用航迹预测模型,预测所述车辆的航迹时,具体用于:将所述空间位置向量以及所述空间运动状态向量输入所述航迹预测模型;在所述航迹预测模型中,根据第一道路数据,计算与所述空间位置向量以及所述空间运动状态向量匹配的目标道路;所述第一道路数据包括:至少一条道路的道路位置数据、车道数据、车道方向数据以及路况数据中的至少一种;根据所述目标道路确定所述航迹。
13、本申请实施例提供一种存储有计算机程序的计算机可读存储介质,当计算机程序被处理器执行时,致使处理器实现所述车辆航迹预测方法中的步骤。
14、在本申请实施例,电子设备可在车辆的定位系统异常时,将实时获取的多种传感器的数据输入到空间车辆运动状态模型,以预测车辆相对于初始计算时刻的空间位置和空间运动状态;根据空间位置向量以及空间运动状态向量,采用航迹预测模型,预测车辆的航迹。通过这种实施方式,在定位系统处于异常状态时仍可较为准确地预测车辆的航迹,提高了航迹预测的准确率和普适性。
技术特征:
1.一种车辆航迹预测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,实时获取所述车辆的多种传感器的数据,包括:
3.根据权利要求1所述的方法,其特征在于,将所述多种传感器的数据输入到预设的空间车辆运动状态模型,以预测当前时刻所述车辆相对于初始计算时刻的空间位置向量和空间运动状态向量,包括:
4.根据权利要求1所述的方法,其特征在于,根据所述空间位置向量以及所述空间运动状态向量,采用航迹预测模型,预测所述车辆的航迹,包括:
5.根据权利要求1所述的方法,其特征在于,根据所述空间位置向量以及所述空间运动状态向量,采用航迹预测模型,预测所述车辆的航迹,包括:
6.根据权利要求5所述的方法,其特征在于,在所述航迹预测模型中,根据第一道路数据,计算与所述空间位置向量以及所述空间运动状态向量匹配的目标道路,包括:
7.根据权利要求1-6任一项所述的方法,其特征在于,所述预测所述车辆的航迹之后,还包括:
8.一种电子设备,其特征在于,包括:存储器以及处理器;
9.一种车辆航迹预测装置,其特征在于,包括:
10.根据权利要求9所述的装置,其特征在于,所述向量预测模块在将所述多种传感器的数据输入到预设的空间车辆运动状态模型,以预测当前时刻所述车辆相对于初始计算时刻的空间位置向量和空间运动状态向量时,具体用于:
11.根据权利要求9所述的装置,其特征在于,所述航迹预测模块在根据所述空间位置向量以及所述空间运动状态向量,采用航迹预测模型,预测所述车辆的航迹时,具体用于:
12.一种存储有计算机程序的计算机可读存储介质,其特征在于,当计算机程序被处理器执行时,致使处理器实现权利要求1-7任一项所述方法中的步骤。
技术总结
本申请实施例提供一种车辆航迹预测方法、装置、设备及存储介质。电子设备可在车辆的定位系统异常时,将实时获取的多种传感器的数据输入到空间车辆运动状态模型,以预测车辆相对于初始计算时刻的空间位置和空间运动状态;根据空间位置向量以及空间运动状态向量,采用航迹预测模型,预测车辆的航迹。通过这种实施方式,在定位系统处于异常状态时仍可较为准确地预测车辆的航迹,提高了航迹预测的准确率和普适性。
技术研发人员:祝勇,方绍伟,蒙越
受保护的技术使用者:北京罗克维尔斯科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!