清扫装置中集尘单元的尘满检测系统及方法与流程
本发明涉及清扫装置的检测,特别是涉及一种清扫装置中集尘单元的尘满检测系统及方法。
背景技术:
1、在日常生活中,需要用到扫地机器人、吸尘器、带有基站的扫地机器人系统等清扫装置,这些清扫装置均配备有集尘单元,集尘单元的形态可以是集尘桶或集尘袋,其中,带有基站的扫地机器人系统中,基站具有总集尘单元,扫地机器人与基站对接后,扫地机器人可将其自身的小集尘单元内的灰尘汇入基站的总集尘单元内,如此扫地机器人无需等待人工清理其集尘单元,可连续执行清扫作业。
2、由于各类清扫装置的集尘单元的容量有限,集尘单元中装满灰尘后清扫装置将无法继续工作,因此,需要对集尘单元进行尘满检测,以方便提醒用户及时处理或根据尘满信号作出决策。
3、清扫装置中,都是通过连接集成单元的抽尘电机将灰尘吸入集尘单元内实现集尘,现有的技术方案中,主要是针对集尘单元的各类信息以及抽尘电机的运转信息进行检测,以判断集尘单元中的灰尘是否达到需要清理的指标。如专利cn112013923a给出的技术方案中,通过检测尘桶内气压参数、尘桶的重量参数、抽尘电机的电流参数和/或转速参数、尘桶的在位时间参数、抽尘电机的工作次数参数等信息判断集尘桶是否装满灰尘;专利cn106093520b给出的技术方案中,通过检测扫地机器人的风道是否堵塞的方式判断集尘盒内的集尘状况。上述这些方案中,有的方案检测难度大、需要定制相关传感器,成本高(如通过检测风道气压参数等方法);有的估计过于粗糙,误差较大(如通过检测尘桶的在位时间参数、抽尘电机的工作次数参数判断尘桶是否已满)。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,本发明提供一种实现简单、成本低且具有较高检测精度的清扫装置中集尘单元的尘满检测系统及方法。
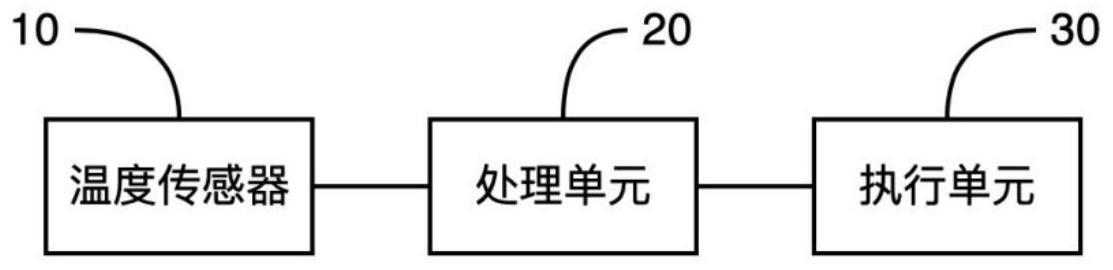
2、技术方案:为实现上述目的,本发明的清扫装置中集尘单元的尘满检测系统,其包括:
3、温度传感器,其用于采集抽尘电机的温度参数;
4、处理单元,其用于接收所述温度参数,并判断所述温度参数是否超过预设阈值;
5、执行单元,其用于在所述温度参数超过所述预设阈值时执行预设操作。
6、进一步地,所述温度传感器与所述抽尘电机的特定部位直接接触。
7、进一步地,所述温度传感器通过导热介质连接所述抽尘电机的特定部位。
8、进一步地,所述抽尘电机上具备安装孔,所述温度传感器嵌在所述安装孔内。
9、进一步地,所述执行单元为提示模块,所述提示模块能够输出直观提示信号或能够向用户携带的设备远程推送提示信息。
10、进一步地,所述执行单元为能够控制所述清扫装置执行特定动作的控制单元。
11、清扫装置中集尘单元的尘满检测方法,所述方法包括:
12、通过温度传感器采集抽尘电机的温度参数;
13、判断所述温度参数是否超过预设阈值;
14、当所述温度参数超过预设阈值,执行预设操作。
15、进一步地,所述执行预设操作包括:
16、输出直观提示信号或向用户携带的设备远程推送提示信息。
17、进一步地,所述执行预设操作包括:
18、控制所述清扫装置执行特定动作。
19、有益效果:本发明的清扫装置中集尘单元的尘满检测系统及方法,通过温度传感器采集抽尘电机的温度并据此判断集尘单元内灰尘是否已满,充分利用了集尘单元装满时风道阻力大造成抽尘电机的电能转化为风能的效率低而转化为热能的效率高的特征,该方案具有传感器布局方便、实现成本低、控制逻辑简单、检测精度高的特点。
技术特征:
1.清扫装置中集尘单元的尘满检测系统,其特征在于,其包括:
2.根据权利要求1所述的清扫装置中集尘单元的尘满检测系统,其特征在于,所述温度传感器与所述抽尘电机的特定部位直接接触。
3.根据权利要求1所述的清扫装置中集尘单元的尘满检测系统,其特征在于,所述温度传感器通过导热介质连接所述抽尘电机的特定部位。
4.根据权利要求2或3所述的清扫装置中集尘单元的尘满检测系统,其特征在于,所述抽尘电机上具备安装孔,所述温度传感器嵌在所述安装孔内。
5.根据权利要求1所述的清扫装置中集尘单元的尘满检测系统,其特征在于,所述执行单元为提示模块,所述提示模块能够输出直观提示信号或能够向用户携带的设备远程推送提示信息。
6.根据权利要求1所述的清扫装置中集尘单元的尘满检测系统,其特征在于,所述执行单元为能够控制所述清扫装置执行特定动作的控制单元。
7.清扫装置中集尘单元的尘满检测方法,其特征在于,所述方法包括:
8.根据权利要求7所述的清扫装置中集尘单元的尘满检测方法,其特征在于,所述执行预设操作包括:
9.根据权利要求7所述的清扫装置中集尘单元的尘满检测方法,其特征在于,所述执行预设操作包括:
技术总结
本发明公开了一种清扫装置中集尘单元的尘满检测系统及方法,其中系统包括温度传感器、处理单元与执行单元,其中,温度传感器用于采集抽尘电机的温度参数;处理单元用于接收所述温度参数,并判断所述温度参数是否超过预设阈值;执行单元用于在所述温度参数超过所述预设阈值时执行预设操作。本发明的清扫装置中集尘单元的尘满检测系统及方法,通过温度传感器采集抽尘电机的温度并据此判断集尘单元内灰尘是否已满,充分利用了集尘单元装满时风道阻力大造成抽尘电机的电能转化为风能的效率低而转化为热能的效率高的特征,该方案具有传感器布局方便、实现成本低、控制逻辑简单、检测精度高的特点。
技术研发人员:赵世迁,张弥
受保护的技术使用者:浙江欣奕华智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!