一种基于UWB和ELM的无人机室内定位方法
一种基于uwb和elm的无人机室内定位方法
技术领域
1.本发明涉及深度学习中的目标定位领域,针对小范围的精确定位尤其是室内定位场景。
背景技术:
2.在室内定位场景中,定位系统的信号强度、信号延时等各种情况都会影响定位效果,直接影响智能家居或者无人机的工作效率和飞行安全。因此,室内定位的精确度就显得尤为重要。
3.传统的定位方式,主要指定路线,比如自动充电的家具,长时间积累误差后得不到修正则可能会偏移原来的位置。其他的定位方式,比如gps在大量的建筑遮挡环境下会影响定位效果,导致无人机等设备发生飘移坠毁。而作为补偿使用的下视觉定位也只能在光线充足且无反光的条件下工作,在暗光且无gps信号的环境下则完全无法正常工作。
4.现有的室内定位方法主要有:
5.(1)无线信号定位。无线信号定位主要有基于wifi定位、蓝牙定位、以及声波定位、uwb信号定位等。
6.(2)步行者航位推算
7.(3)图像定位。
8.随着脉冲无线电技术以及深度学习的不断进步和发展,其在工业领域的应用越来越广泛,尤其是室内定位领域,出现了诸多定位方式,但对于三维空间精确定位,始终是目标定位领域的一个难题。本发明就是着力于有扰情况下的室内精确定位。本发明在室内精确定位领域有一定的通用性,并针对定位误差以及定位效率进行了改进。
技术实现要素:
9.为了克服上述现有技术的不足,本发明提出了一种基于uwb和elm的无人机室内定位方法。该技术结合了uwb信号和机器学习的优势,对室内目标的定位误差以及定位效率进行了改进。
10.本发明所采用的技术方案是:
11.步骤1:数据采集,设定4个不在同一平面的锚点用以发射uwb信号,一个靶点用于接收uwb信号。
12.步骤2:有效数据提取采用k-means聚类,设定3个或3个以上类用以排除异常数据。
13.步骤3:选取步骤2中最大类数据作为有效值,与实际目标位置一同输入到elm网络进行训练,得到训练模型。
14.步骤4:测试数据输入训练后的模型即可得到当前的目标位置。
15.与现有技术相比,本发明的有益效果是:
16.(1)在室内目标的精确定位上,能够达到更高的定位精度;
17.(2)误差控制相对稳定,不存在随时间或者空间的累积误差。
附图说明
18.图1为:实验场景示意图。
19.图2为:原始点图
20.图3为:聚类结果散点图
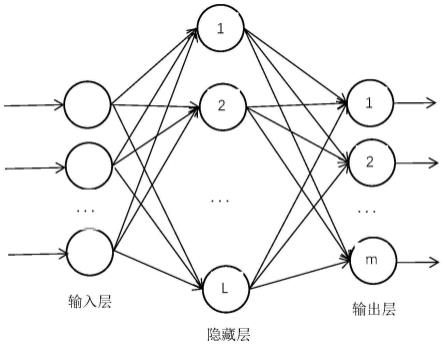
21.图4为:极限学习机结构图
22.图5为:elm模型预测效果图
具体实施方式
23.下面结合附图对本发明进一步说明。
24.首先,实验场景如图1所示,利用四个固定的、不在同一平面的uwb锚点以及一个靶点测试不同位置的物理坐标以及信号飞行时间tof。uwb锚点将以某一较高频率发射uwb信号,而靶点通过接受该信号来计算飞行时间tof,从而进一步计算自身与锚点距离。同一时刻计算得到的4个tof作为数据集,当前实际物理坐标作为标签。
25.而后,由于环境中可能存在的干扰或者器件自身的问题,这些接收到的数据中可能存在与事实不符的异常数据。此时通过,k-means聚类算法对这些原始数据进行聚类。根据现实的情况,异常数据通常与真实数据偏差较大,通常会自成一个或者几个较小的类,此时通过选择最大的一类作为数据来源,同时剔除最大类中的重复数据以减少重复的无意义运算。如图2所示,红点为一个集中的大类而蓝点为偏差过大的小类,此时蓝点应视作异常数据被剔除。
26.将筛选过后的tof数据组以及位置标签输入到极限学习机elm中进行训练,得到训练好的定位模型。
27.之后通过输入当前空间的其他tof数据即可得到模型计算的位置坐标,从而实现目标定位。
28.具体方法
29.如图4elm结构图,elm的具体技术方案可分为如下4步:
30.(1)随机特征映射。隐藏层参数随机初始化,采用非线性函数作为激活函数,将输入的tof数据映射到elm空间。隐藏层节点参数ω和b根据任意连续的概率分布随机生成。
31.(2)线性参数求解。经过第一阶段后ω和b已经确定下来,通过公式
32.hi(x)=g(ωix+bi),ωi∈rd,bi∈r
33.h(x)=[h1(x),h2(x),...,h
l
(x)]
[0034]
计算出隐藏层输出h。其中hi(x)是第i个隐藏层的节点输出,g(ωi,bi,x)是激活函数,l为隐藏层节点数。
[0035]
(3)通过最小化近似平方差对连接隐藏层和输出层的权重β进行求解
[0036]
min||hβ-t||2,β∈r
lm
[0037]
其中,t为训练标签,m为输出层节点数。
[0038]
(4)所有参数求解完毕之后,根据
[0039]
[0040]
即可得到elm的输出。
[0041]
采用elm的好处在于可以增加原始数据的误差宽容度,同时在固定场景下减少计算量,使得定位更加迅速、更加精确。
[0042]
图5为elm训练模型的测试情况,输出的预测值与标签值相当接近,总体定位误差不会超过10cm,可以有效用于室内等固定场景的精确定位。
[0043]
以上所述,仅为本发明的具体实施方式,本说明中所公开的任一特征,除非特别叙述,均可被其他等效或者具有类似目的的替代特征加以替换;所公开的所有特征、或所有方法或过程中的步骤,除了互相排斥的特征或/和步骤外,均可以任何方式组合。
技术特征:
1.一种基于uwb和elm的无人机室内定位技术,包括以下步骤:步骤1:数据采集,设定4个不在同一平面的锚点用以发射uwb信号,一个靶点用于接收uwb信号。步骤2:有效数据提取采用k-means聚类,设定3个或3个以上类用以排除异常数据。步骤3:选取步骤2中最大类数据作为有效值,与实际目标位置一同输入到elm网络进行训练,得到训练模型。步骤4:测试数据输入训练后的模型即可得到当前的目标位置。2.如权利要求1所述方法,其特征在于,步骤1中的数据采集采用uwb信号。3.如权利要求1所述方法,其特征在于,步骤2中的聚类方法采用k-means方法。4.如权利要求1所述方法,其特征在于,步骤3中的单隐藏层前馈神经网络采用elm。
技术总结
本发明公开了一种基于UWB和ELM的无人机室内定位技术。该发明在室内精确定位具有一定的通用性,该专利以室内无人机定位作为说明案例。针对精确定位问题,在定位过程中加入了K-Means聚类用于筛选可靠数据,聚类算法对于数据筛选具有一定的通用性和可移植性;针对环境的固定干扰以及UWB收发设备的误差问题,需要通过极限学习机进行训练,能有效提升定位精度和定位效率。和定位效率。和定位效率。
技术研发人员:许文波 袁帅 李彧 钱孝伟 胡佳丽 张钰琪 黄婧 贾海涛
受保护的技术使用者:电子科技大学长三角研究院(湖州)
技术研发日:2021.12.04
技术公布日:2022/7/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1