ELM辅助的GNSS/INS组合导航无人靶车定位方法与流程
elm辅助的gnss/ins组合导航无人靶车定位方法
技术领域
1.本发明属于无线通信技术领域,更进一步涉及导航定位技术领域中一种极限学习机elm(extreme learning machine)神经网络辅助的全球导航卫星系统gnss(global navigation satellite system)/惯性导航系统ins(inertial navigation system)组合导航的室外无人靶车定位方法。本发明可用于室外靶场无人靶车运动的实时导航定位,且在卫星信号短暂失锁的情况下通过elm神经网络的预测输出补偿惯性导航系统的误差。
背景技术:
2.在导航定位技术方面,目前应用最多且较为成熟的方式有卫星导航系统和惯性导航系统。卫星导航系统的优点是具有全球性、全天候、长时间定位精度高的特点,但缺点是信号易受干扰和遮挡。在某些恶劣的环境条件下,卫星信号质量变差,输出不连续,在无人靶车这种需要快速更新信息的场合,卫星导航系统的缺点便凸显出来。而惯性导航系统是一种全自主式的导航方式,因此具有很强的隐蔽性和抗干扰的能力,并且输出信息连续,短时间内定位精度高。但是,由于惯性导航系统中的惯性测量器件自身的特点,陀螺仪和加速度计有初始零偏、随机漂移等误差,随着时间的累计其误差越来越大,长时间定位精度较差,最终无法准确反映无人靶车实时位置信息。
3.中铁第四勘察设计院集团有限公司在其申请的专利文献“一种gnss与惯导组合导航位置输出的滤波校正方法”(申请号:202010584388.x,申请公布号:cn 111947681 a,申请日:2020年6月24日)中公开了一种gnss与惯导组合导航位置输出的滤波校正实现室外无人靶车定位的方法。该方法的步骤包括:先建立gnss/ins组合导航系统的误差状态方程;然后建立gnss/ins组合导航系统的量测方程,系统采用松组合的方式,利用gnss与ins提供的位置之差作为卡尔曼滤波的量测信息;最后采用卡尔曼滤波方法对系统状态进行估计,并根据滤波估计结果,对ins输出的位置进行校正,得到最终的卡尔曼滤波结果并交替采用反馈校正以及输出校正对系统的位置进行校正。该方法存在的不足之处是:无人靶车的工作环境中,通常会发生卫星信号短暂失锁,交替采用反馈校正的方法只是进行多次信息融合,惯性导航系统独立工作导致定位误差会随时间累积而不断增大,对定位精度的误差补偿不够精确。
4.李小燕等人在其发表的论文“基于bp神经网络辅助的组合导航算法研究”(《电子器件》2018年第41卷第6期)中公开了一种基于bp神经网络辅助的组合导航定位系统实现室外无人靶车定位的方法。该方法的步骤包括:在gps信号有效的时候,采用卡尔曼滤波对ins/gps信号进行数据融合得到无人靶车实时运动的精确位置,同时利用组合导航输出信息对bp神经网络进行实时在线训练,一旦gps失锁,利用之前训练好的bp神经网络对ins系统进行误差补偿,解决在gps信号失锁时无人靶车运动的定位精度迅速下降问题。该方法存在的不足之处是:无人靶车的导航定位需要高实时性,bp神经网络是采用梯度下降法,利用反向传播的方式进行的学习,需要不断地进行迭代来更新权重和阈值,容易陷入局部最优,收敛速度慢,导致卫星信号失锁情况下无人靶车运动时的定位实时性不高。
技术实现要素:
5.本发明的目的在于针对上述已有技术的不足,提出一种基于elm神经网络辅助的gnss/ins组合导航的室外无人靶车定位方法,用于解决在卫星信号失锁的情况下单一的惯性导航系统工作导致无人靶车导航精度迅速下降和bp神经网络收敛速度慢导致无人靶车导航定位实时性不高的问题。
6.实现本发明目的的技术思路是,本发明构建了elm神经网络,该网络仅设置了隐含层数据通道的个数,通过求解一个最小平方差,得到elm神经网络的输出层权重。利用构建的elm神经网络在卫星信号短暂失锁情况下通过对样本集中加速度和角速度值进行训练,得到训练好的elm神经网络。再利用该训练好的网络预测卫星信息和惯性导航信息的导航信息误差值,以修正惯性导航系统输出的导航信息,辅助gnss/ins组合导航系统进行室外无人靶车实时导航定位,达到卫星信号短暂失锁情况下替代卫星导航系统的作用,解决了现有技术中卫星信号失锁情况下单一的惯性导航系统工作导致无人靶车导航精度迅速下降的问题。本发明在构建elm神经网络过程中,随机产生输入层的权值和隐含层的偏置,在对elm神经网络训练过程中,只需设置隐含层数据通道的个数,求解一个最小平方差得到elm神经网络的输出层权重,不需要像梯度学习法一样通过迭代反复调整刷新网络各层的参数,提高了训练速度。因此,本发明采用的elm神经网络训练参数少、学习速度快、泛化性能好,解决了现有技术中bp神经网络收敛速度慢导致无人靶车导航定位实时性不高的问题。
7.为实现上述目的,本发明采取的技术方案包括如下步骤:
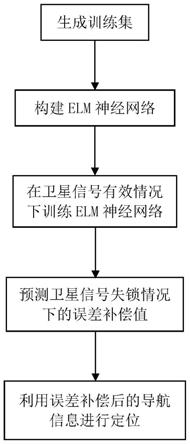
8.步骤1,生成训练集:
9.(1a)采集无人靶车运动200s时间内的导航数据组成样本集,其中加速度和角速度数据各自至少包含2000个;
10.(1b)对样本集中的导航数据进行解算后再进行卡尔曼滤波,得到无人靶车运动的每个加速度和角速度的导航数据误差补偿值;
11.(1c)将样本集及其对应的导航数据误差补偿值组成训练集;
12.步骤2,构建elm神经网络:
13.构建包含输入层、隐含层、输出层三层结构的elm神经网络,其中输入层包含6个数据通道,隐含层包含12个数据通道,输出层包含9个数据通道,激活函数采用sigmoid函数;
14.步骤3,在卫星信号有效情况下训练elm神经网络:
15.在卫星信号有效情况下,将训练集输入到elm神经网络中,根据连续的概率分布随机生成输入层权重和隐含层的偏置,利用最小化平方差公式,计算输出层的权重,利用正交投影法更新网络的隐含层的输出,将更新后的隐含层的输出与输出层的权重构成网络的输出,更新迭代隐含层的输出直到网络输出与样本标签的最小化平方差最小时停止迭代,得到训练好的elm神经网络;
16.步骤4,预测卫星信号失锁情况下的误差补偿值:
17.将卫星信号失锁的时间范围内采集到的每个加速度、角速度信息输入到训练好的elm神经网络中,网络输出组合导航系统正常工作时卡尔曼滤波后的卫星信息和惯性导航信息的导航信息误差值;
18.步骤5,利用误差补偿后的导航信息进行定位:
19.将网络输出的导航信息误差值反馈回惯性导航系统进行补偿,得到补偿后的定位信息。
20.本发明与现有技术相比,具有以下优点:
21.第一,由于本发明利用构建并训练好的elm神经网络预测导航信息误差值,辅助gnss/ins组合导航系统进行室外无人靶车实时导航定位,克服了在卫星短暂失锁情况下单一的惯性导航系统在工作时定位精度会随着时间而发散的不足,使得本发明可以修正在卫星信号短暂失锁情况下惯性导航系统输出的导航信息,提高了室外无人靶车运动时的定位精度。
22.第二,由于本发明通过构建elm神经网络对样本集中加速度和角速度值进行训练,得到训练好的elm神经网络预测卫星信号短暂失锁情况下的卫星信息和惯性导航信息的导航信息误差值,来补偿惯性导航系统的导航误差。本发明采用的elm神经网络训练参数少、学习速度快、泛化性能好,克服了现有技术中存在的bp神经网络容易陷入局部最优,收敛速度慢的不足,提高了在卫星信号短暂失锁情况下无人靶车导航定位的实时性。
附图说明
23.图1为本发明的实现流程图;
24.图2为本发明与现有技术定位误差的仿真结果对比图。
具体实施方式
25.下面结合附图和具体实施例,对本发明作进一步的详细描述。
26.参照图1和实施例,对本发明的实现步骤作进一步的详细描述。
27.步骤1,生成训练集。
28.通过卫星模块um220和惯性导航模块jy901采集无人靶车运动200s时间内的导航数据组成样本集,其中,加速度和角速度数据各自包含2000个。
29.无人靶车的初始时刻位置坐标的经度为东经108
°
54'49”,纬度为北纬34
°
13'55”,高度为420m。
30.对样本集中的导航数据进行解算后再进行卡尔曼滤波,得到无人靶车运动的每个加速度和角速度的导航数据误差补偿值。
31.对样本集中的导航数据进行解算是由下式实现的:
[0032][0033]
其中,l、a、h分别表示第t个时刻无人靶车位置的坐标经度、纬度和高度,l0、a0、h0分别表示初始时刻无人靶车位置的坐标经度为东经108
°
54'49”,纬度为北纬34
°
13'55”,高度为420m,rm和rn分别表示地球子午圈曲率半径为和地球卯酉圈曲率半径,ve,vn,vu分别表示东北天坐标系下的三个方向的速度分量由样本集中的加速度和角速度数据计算得到,
sec(
·
)表示正割操作。
[0034]
将样本集及其对应的导航数据误差补偿值组成训练集。
[0035]
步骤2,构建elm神经网络。
[0036]
构建包含输入层、隐含层、输出层三层结构的elm神经网络,其中输入层包含6个数据通道,隐含层包含12个数据通道,输出层包含9个数据通道,激活函数采用sigmoid函数。
[0037]
步骤3,在卫星信号有效情况下训练elm神经网络。
[0038]
将训练集中采集到的200s的加速度和角速度数据各自2000个输入到elm神经网络中,根据连续的概率分布随机生成输入层权重和隐含层的偏置,利用最小化平方差公式,计算输出层的权重,利用正交投影法更新网络的隐含层的输出,将更新后的隐含层的输出与输出层的权重构成网络的输出,更新迭代隐含层的输出直到网络输出与样本标签的最小化平方差最小时停止迭代,得到训练好的elm神经网络。
[0039]
最小化平方差公式如下:
[0040]
min||hβ-ti||2,β∈r
l
×m[0041]
其中,min表示取最小值操作,||
·
||2表示求平方差操作,h表示elm神经网络隐含层的输出,β表示elm神经网络输出层的权重,ti表示elm神经网络训练数据的第i个加速度和角速度的导航数据误差补偿值,l表示elm神经网络隐含层数据通道的总数,m表示elm神经网络输出层数据通道的总数。
[0042]
步骤4,预测卫星信号失锁情况下的误差补偿值。
[0043]
在卫星模块um220断电导致的模拟卫星信号失锁的情况下,将惯性导航模块jy901采集到的每个加速度、角速度信息输入到训练好的elm神经网络中,网络输出组合导航系统正常工作时卡尔曼滤波后的卫星信息和惯性导航信息的导航信息误差值。
[0044]
步骤5,利用误差补偿后的导航信息进行定位。
[0045]
将网络输出的卫星信息和惯性导航信息的导航信息误差值反馈回惯性导航系统进行补偿,得到补偿后的经度信息和纬度信息。
[0046]
下面结合仿真实验对本发明的效果做进一步的说明:
[0047]
1.仿真条件和内容:
[0048]
本发明的仿真实验的硬件平台为:惯性导航模块为jy901,卫星模块为um220,微控制器为stm32f103,处理器为intel i5 9300h cpu,主频为2.8ghz,内存16gb。
[0049]
本发明的仿真实验的软件平台为:windows 10操作系统和matlab r2020a。
[0050]
本发明仿真实验所用到的数据,采集自西安电子科技大学北校区,采集时间为2021年10月,样本集的内容为500秒内的gnss和ins导航定位数据。
[0051]
2.仿真内容及其结果分析:
[0052]
本发明仿真实验是采用本发明和两个现有技术(基于gnss和惯导组合导航的室外无人靶车定位方法、基于bp神经网络辅助的gnss和惯导组合导航的室外无人靶车定位方法),分别对本发明所采集的500秒内每一秒的导航定位数据进行导航解算,得到室外无人靶车的定位结果,再将每个定位结果减去与其对应的实际定位结果,得到定位误差并绘制成定位误差曲线,如图2所示。
[0053]
在仿真实验中,采用的两个现有技术是指:
[0054]
现有技术基于gnss和ins组合导航的室外无人靶车定位方法是指,中铁第四勘察
设计院集团有限公司在其申请的专利文献“一种gnss与惯导组合导航位置输出的滤波校正方法”(申请号:202010584388.x,申请公布号:cn111947681a)中提到的室外无人靶车定位方法。
[0055]
现有技术基于bp神经网络辅助的gnss和ins组合导航的室外无人靶车定位方法是指,李小燕等人在其发表的论文“基于bp神经网络辅助的组合导航算法研究”(《电子器件》2018年第41卷第6期)中提到的室外无人靶车定位的方法。
[0056]
下面结合图2的仿真图对本发明的效果做进一步的描述。
[0057]
图2中以“虚线”标示的曲线表示基于gnss和ins组合导航的室外无人靶车定位方法的仿真曲线,图2中以“点线”标示的曲线表示基于bp神经网络辅助的gnss和ins组合导航的室外无人靶车定位方法的仿真曲线,图2中以“实线”标示的曲线表示本发明所提到的基于elm神经网络辅助的gnss和ins组合导航的室外无人靶车定位方法的仿真曲线。
[0058]
图2中的(a)图是本发明与现有技术定位误差的仿真结果经度误差对比图,横坐标表示定位时间,纵坐标表示经度的定位精度误差值。图2中的(b)图是本发明与现有技术定位误差的仿真结果纬度误差对比图,横坐标表示定位时间,纵坐标表示纬度的定位精度误差值。由图2(a)、(b)可以看出,在500秒的定位时间内,本发明所提出的方法定位精度误差稳定在20米附近。基于gnss和ins组合导航的室外无人靶车定位方法在前100秒内定位精度误差维持在20米附近,在后400秒定位精度误差便随着时间推移越来越大。基于bp神经网络辅助的gnss和ins组合导航的室外无人靶车定位方法在260秒内,定位精度误差维持在20米附近,在后240秒定位精度误差随着时间推移开始越来越大。
[0059]
以上仿真实验表明:本发明方法利用构建的elm神经网络,该网络仅设置了隐含层数据通道的个数,通过求解一个最小平方差,得到elm神经网络的输出层权重。利用构建的elm神经网络在卫星信号短暂失锁情况下通过对样本集中加速度和角速度值进行训练,得到训练好的elm神经网络。再利用该训练好的网络预测卫星信息和惯性导航信息的导航信息误差值,以修正惯性导航系统输出的导航信息,辅助gnss/ins组合导航系统进行室外无人靶车实时导航定位,达到卫星信号短暂失锁情况下替代卫星导航系统的作用,解决了现有技术中卫星信号失锁情况下单一的惯性导航系统工作导致无人靶车导航精度迅速下降的问题,本发明在构建elm神经网络过程中,随机产生输入层的权值和隐含层的偏置,在对elm神经网络训练过程中,只需设置隐含层数据通道的个数,求解一个最小平方差得到elm神经网络的输出层权重,不需要像梯度学习法一样通过迭代反复调整刷新网络各层的参数,提高了训练速度,是一种非常实用的室外无人靶车定位方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1