一种应用激光雷达技术测量半挂车尺寸的检测系统及方法与流程
本发明涉及一种应用激光雷达技术测量半挂车尺寸的检测系统,属于信息。
背景技术:
1、三维激光雷达技术是近几十年来摄影测量与遥感领域具有革命性的成就之一,是继全球定位系统发明以来在遥感测绘领域的又一座里程碑,是大范围空间数据采集和空间检测技术的革命,是各行各业数字化需求最为有效的途径之一。它集激光测距、ccd摄像、pos于一体,可分别组成车载、机载和星载激光雷达系统,全天候、实时、主动、快速、高精度、高密集、直接获取大范围地表及地物三维数据。同时,三维激光扫描也可自成体系,组成地面三维激光扫描仪。
2、激光雷达技术像传统的微波雷达一样,由雷达向目标发射波束,然后接收目标反射回来的信号,并将其与发射信号对比,获得目标的距离、速度以及姿态等参数,但它又不同于传统的微波雷达,它发射的不是微波束,而是激光束,使得激光雷达具有不同于普通微波雷达的特点。地面三维成像激光扫描仪的巨大优势就在于可以快速扫描被测物体,不需要反射棱镜即可直接获得高密度的扫描点云数据。这样一来就可以高效地对真实情况进行三维建模。
3、地面三维激光雷达扫描站点的设置必须遵循一个总体的原则:
4、(1)重复性。该原则所指的是每一个站点与其临近的站点扫描的范围需要又一定的重复性,这是后期数据处理中的数据拼接的必要条件。 (2)多视角。该原则所指从不同水平角度,包括仰视、俯视,以及不同高度设置站点,这样可以获取最全面的目标物的三维点云数据。 (3)整体性。该原则所指激光扫描仪设置的站点需要充分考虑目标物的体积以及距离目标物的有效距离,设置扫描有效范围,用最少的站点获取目标物的整体点云信息。
5、传统测量方法:测量人员对检测区域的半挂车辆进行手动测量。
技术实现思路
1、本发明提出了一种应用激光雷达技术测量半挂车尺寸的检测系统。
2、本发明技术方案为:
3、一种应用激光雷达技术测量半挂车尺寸的检测系统,其特征是,包括:前置机,激光雷达扫描仪,服务器,所述的激光雷达扫描仪安装在半挂车检测区域两侧的滑轨上,所述激光雷达移动扫描半挂车获取高精度3d点云数据,所述的前置机获取所述激光雷达扫描仪的点云数据,建模生成三维点云图,对3d点云建模数据进行处理,获取三维空间精确坐标,运算得到左右侧距离,将两侧激光雷达建模结果融合得到半挂车的牵引销梁至第一排轮胎的距离,以及轮胎轴距。
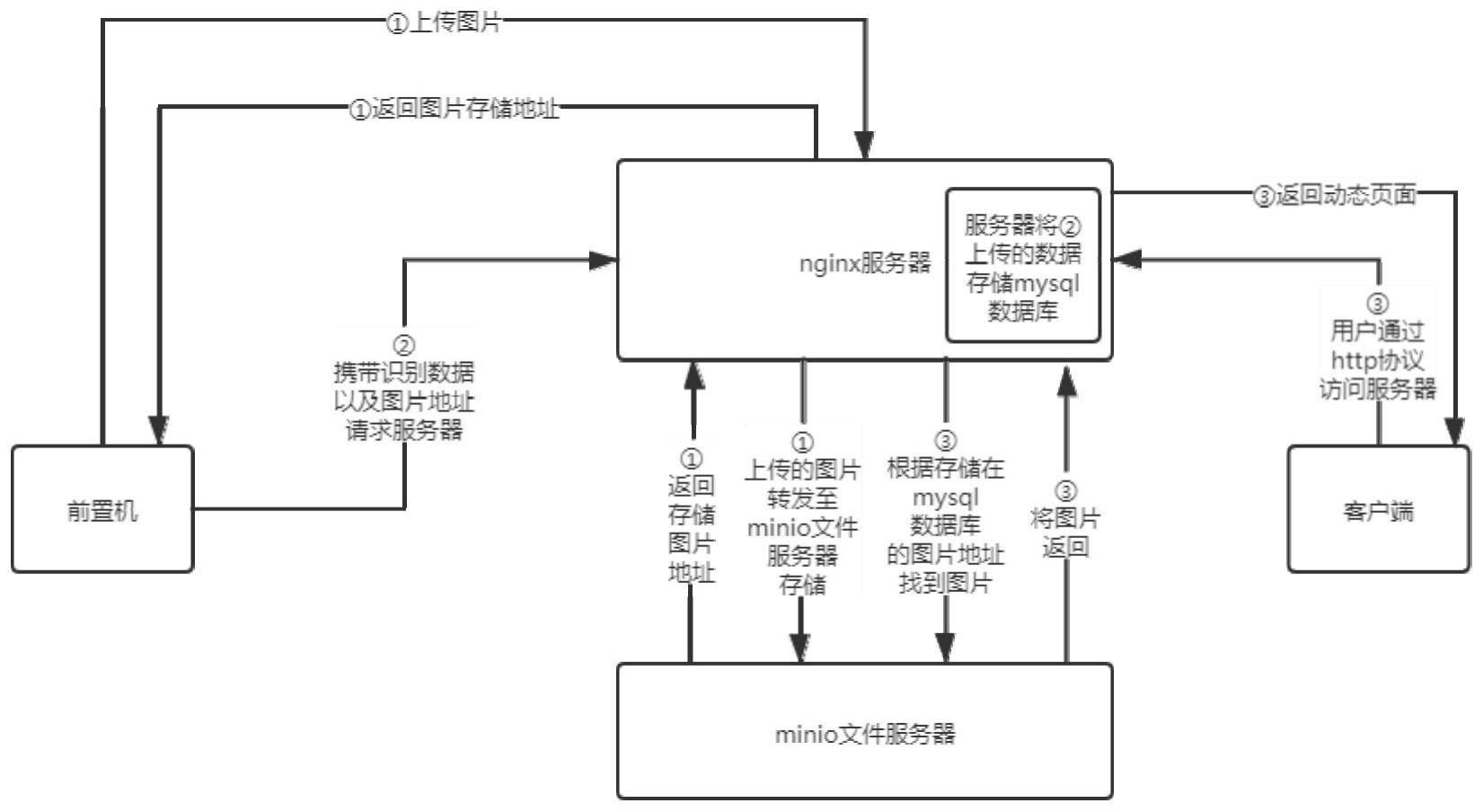
4、进一步的,所述服务器包括nginx服务器以及minio文件服务器,所述前置机上传图片数据请求nginx服务器,nginx服务器将请求转发至minio文件服务器,minio文件服务器将文件进行保存并返回图片地址至前置机,前置机携带图片地址以及识别数据访问nginx服务器,nginx服务器将接收到的数据存储在mysql数据库。
5、一种应用激光雷达技术测量半挂车尺寸的检测方法,其特征是,包括如下步骤:
6、步骤1:激光雷达扫描仪左右滑轨平台扫描获取3d点云数据,3d点云建模;
7、步骤2:提取前景点云数据识别当前待测区域是否有半挂车;
8、步骤3:判断有车后,提取前景半挂车点云,完全去除背景点云;
9、步骤4:以半挂车点云质心为中心,变换点云坐标系;
10、步骤5:根据牵引销梁相对半挂车位置提取roi点云;
11、步骤6:根据点云数量及密度判断牵引销梁是否放下;
12、步骤7:检测牵引销梁已放下后,左右两侧点云数据分别通过分割算法和相对位置,分割三组轮胎及牵引销;
13、步骤8:通过点云算法得到三组轮胎表面驻点及法向量,得到每组轮胎中心轴最外侧三维坐标;通过每组轮胎中心轴最外侧三维坐标,运算得到第一第二,第二第三组轮胎轴距误差;
14、步骤9:根据牵引销梁点云数据得到xy平面点云质心坐标;
15、步骤10:运算xy平面牵引销梁点云质心到第一组轮胎中心轴最外侧坐标间距离;
16、步骤11:比较左右点云数据牵引销梁点云质心到第一组轮胎左右距离结果,得到最终误差。
17、有益效果:
18、1.实时性高,半挂车尺寸检测速度快,及时将结果发送至服务器;
19、2.激光雷达在各类测绘传感器中具有极高的精度;
20、3.不受半挂车位置偏移影响;
21、4.全自动测距,自动开启检测,无需人工干预;
22、5.鲁棒性强,易维护;
23、6.不受环境温度湿度影响。
技术特征:
1.一种应用激光雷达技术测量半挂车尺寸的检测系统,其特征是,包括:前置机,激光雷达扫描仪,服务器,所述的激光雷达扫描仪安装在半挂车检测区域两侧的滑轨上,所述激光雷达扫描仪移动扫描半挂车获取高精度3d点云数据,所述的前置机获取所述激光雷达扫描仪的点云数据,建模生成三维点云图,对3d点云建模数据进行处理,获取三维空间精确坐标,运算得到左右侧距离,将两侧激光雷达建模结果融合得到半挂车的牵引销梁至第一排轮胎的距离,以及轮胎轴距。
2.根据权利要求1所述的一种应用激光雷达技术测量半挂车尺寸的检测系统,其特征在于,所述服务器包括nginx服务器以及minio文件服务器,所述前置机上传图片数据请求nginx服务器,nginx服务器将请求转发至minio文件服务器,minio文件服务器将文件进行保存并返回图片地址至前置机,前置机携带图片地址以及识别数据访问nginx服务器,nginx服务器将接收到的数据存储在mysql数据库。
3.一种应用激光雷达技术测量半挂车尺寸的检测方法,其特征是,包括如下步骤:
技术总结
本发明涉及一种应用激光雷达技术自动测量半挂车尺寸的检测系统,尤其涉及一种应用激光雷达技术测量半挂车尺寸的检测系统,包括:前置机,激光雷达扫描仪,服务器,所述的激光雷达扫描仪安装在半挂车检测区域两侧的滑轨上,所述激光雷达移动扫描半挂车获取高精度3D点云数据,所述的前置机获取所述激光雷达扫描仪的点云数据,建模生成三维点云图,对3D点云建模数据进行处理,获取三维空间精确坐标,运算得到左右侧距离,将两侧激光雷达建模结果融合得到半挂车的牵引销梁至第一排轮胎的距离,以及轮胎轴距。
技术研发人员:李豪
受保护的技术使用者:中集飞瞳(上海)科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!