一种大跨空间结构竖向变形动态监测方法与流程
1.本发明涉及建筑结构的竖向变形监测技术领域,具体来说是一种大跨空间结构竖向变形动态监测方法。
背景技术:
2.大跨空间结构的竖向变形是其结构监测的重点之一,但现有的监测方法受测量精度或实时性的影响,仅可获取其静态变形,无法获取大跨度空间结构在台风或地震等灾害天气下动态竖向变形响应。目前,在施工阶段,大跨空间结构主要采用全站仪进行人工监测,实时性较差,不能进行动态监测。在运营阶段,大跨空间结构可采用gps进行动态监测,但最高的实时监测精度仅为2cm~3cm。且易受到多路径效应的影响,不能满足工程需求。
3.中国发明专利,专利号:201910762034.7公开了一种基于红外靶标技术的隧道变形自动监测系统及方法,监测系统包括:红外靶标、图像数字位移监测传感器和数据采集处理中心;在选定的每个隧道监控量测断面的左侧拱腰位置、右侧拱腰位置和拱顶位置均各可转动的安装一个所述红外靶标;在隧道施工稳定部位固定安装所述图像数字位移监测传感器;各个所述红外靶标的红外发射方向朝向所述图像数字位移监测传感器。该发明提供的隧道变形自动监测系统及方法适用范围较小,仅限于隧道变形的测量,且未考虑温漂和光照对监测值的影响,未设置基准点和采取校准措施对监测值进行校准,不适宜长期变形动态监测和恶劣天气下的变形动态监测。
技术实现要素:
4.本发明的目的在于提供一种能满足大跨度空间结构的动态监测要求,既可用于大跨度空间结构在稳态荷载下的静态变形监测,也可用于大跨空间结构在灾害天气(如:台风、地震等)下的动态变形监测。
5.为了实现上述目的,设计一种大跨空间结构竖向变形动态监测方法,方法具体如下:a.在大跨空间结构的跨中或者悬挑端部的各监测点分别布设红外led灯标靶,作为监测点;b.在大跨空间结构的不动点布设红外led灯标靶,作为基准点;c.在大跨空间结构的支座处或其它不动点处安装定焦红外摄像机,安装方向朝向监测点;d.调整基准点红外led灯标靶和监测点红外led灯标靶方向使其朝向摄像机;e.采用红外摄像机对红外led灯标靶进行拍摄成像并上传至本地的采集仪进行坐标解算;f.在基准点或监测点布置棱镜;g.采用带自动马达的全站仪,对棱镜的坐标和循环监测的路线进行学习和记录;h.通过无线模块控制全站仪自动对棱镜的坐标进行循环监测,并上传至服务器;
i.将摄像机的监测数据与全站仪的监测数据进行联合解算,获取各监测点最终的监测值。
6.优选的:所述步骤e具体方法如下:通过红外相机照片解算得到的基准点监测值为v0,监测点的监测值分别为v1、v2,通过全站仪获得的基准点竖向位移量为vv,则监测点通过基准点修正后的监测值分别为v
1-v0+vv和v
2-v0+vv。
7.本发明同现有技术相比,其优点在于:当监测点距离在100m以内时,该方法的动态监测精度可达1mm,监测频率可达100hz,能满足大跨度空间结构的动态监测要求,既可用于大跨度空间结构在稳态荷载下的静态变形监测,也可用于大跨空间结构在灾害天气(台风、地震等)下的动态变形监测。
附图说明
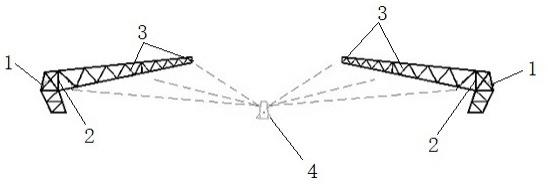
8.图1 为本发明的监测点布置完整示意图;图2为本发明的监测点布置局部放大示意图;图中:1.红外摄相机,2.基准点,3.监测点,4.全站仪。
具体实施方式
9.参见图1、图2,一种大跨空间结构竖向变形动态监测方法,具体方法如下:a.在大跨空间结构的跨中或者悬挑端部的各监测点分别布设红外led灯标靶,作为监测点;b.在大跨空间结构的不动点布设红外led灯标靶,作为基准点;c.在大跨空间结构的支座处或其它不动点处安装定焦红外摄像机,安装方向朝向监测点;d.调整基准点红外led灯标靶和监测点红外led灯标靶方向使其朝向摄像机;e.采用红外摄像机对红外led灯标靶进行拍摄成像并上传至本地的采集仪进行坐标解算;f.在基准点或监测点布置棱镜;g.采用带自动马达的全站仪,对棱镜的坐标和循环监测的路线进行学习和记录;h.通过无线模块控制全站仪自动对棱镜的坐标进行循环监测,并上传至服务器;i.将摄像机的监测数据与全站仪的监测数据进行联合解算,获取各监测点最终的监测值。
10.上述步骤e具体方法如下:通过红外相机照片解算得到的基准点监测值为v0,监测点的监测值分别为v1、v2,通过全站仪获得的基准点竖向位移量为vv,则监测点通过基准点修正后的监测值分别为v
1-v0+vv和v
2-v0+vv。
11.所述方法有一优选的实施例,上海体育场采用径向悬挑桁架和环向桁架组成的马鞍形钢管大跨空间结构,跨度达288m,最大悬挑达73.5m。采样该方法进行竖向变形的动态监测。基准点、监测点、红外相机、红外led灯、全站仪的布置安装如图1和图2所示。
12.通过红外相机照片解算得到的基准点监测值为v0,监测点的监测值分别为v1、v2,通过全站仪获得的基准点竖向位移量为vv,则监测点通过基准点修正后的监测值分别为v
1-v0+vv和v
2-v0+vv。
13.该实施例通过上述方法取得了良好的监测效果,实时测量精度可达到亚毫米级。
14.本发明提供的大跨度空间结构竖向变形动态监测方法,当监测点距离在100m以内时,该方法的动态监测精度可达1mm,监测频率可达100hz,能满足大跨度空间结构的动态监测要求,既可用于大跨度空间结构在稳态荷载下的静态变形监测,也可用于大跨空间结构在灾害天气(台风、地震等)下的动态变形监测。
15.以上所述,仅为此发明的具体实施方式,但本发明的保护范围不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案和新型的构思加于等同替换或改变,都应涵盖在本发明的保护范围之内。
技术特征:
1.一种大跨空间结构竖向变形动态监测方法,其特征在于方法具体如下:a.在大跨空间结构的跨中或者悬挑端部的各监测点分别布设红外led灯标靶,作为监测点;b.在大跨空间结构的不动点布设红外led灯标靶,作为基准点;c.在大跨空间结构的支座处或其它不动点处安装定焦红外摄像机,安装方向朝向监测点;d.调整基准点红外led灯标靶和监测点红外led灯标靶方向使其朝向摄像机;e.采用红外摄像机对红外led灯标靶进行拍摄成像并上传至本地的采集仪进行坐标解算;f.在基准点或监测点布置棱镜;g.采用带自动马达的全站仪,对棱镜的坐标和循环监测的路线进行学习和记录;h.通过无线模块控制全站仪自动对棱镜的坐标进行循环监测,并上传至服务器;i.将摄像机的监测数据与全站仪的监测数据进行联合解算,获取各监测点最终的监测值。2.如权利要求1所述的一种大跨空间结构竖向变形动态监测方法,其特征在于方法所述步骤e具体方法如下:通过红外相机照片解算得到的基准点监测值为v0,监测点的监测值分别为v1、v2,通过全站仪获得的基准点竖向位移量为vv,则监测点通过基准点修正后的监测值分别为v
1-v0+vv和v
2-v0+vv。
技术总结
本发明涉及建筑结构的竖向变形监测技术领域,具体来说是一种大跨空间结构竖向变形动态监测方法,步骤如下:在大跨空间结构的各监测点分别布设红外LED灯标靶;在结构的不动点布设红外LED灯标靶作为基准点;在结构的不动点处安装朝向监测点的红外摄像机;调整基准点和监测点的标靶方向使其朝向摄像机;用摄像机对标靶进行拍摄成像并通过采集仪进行坐标解算;布设棱镜并采用带自动马达的全站仪对其坐标进行循环监测;将摄像机和全站仪的监测数据进行联合解算得到最终监测值。本发明同现有技术相比,其优点在于:既可用于大跨度空间结构在稳态荷载下的静态变形监测,也可用于大跨空间结构在灾害天气(台风、地震等)下的动态变形监测。监测。监测。
技术研发人员:王超
受保护的技术使用者:王超 上海建科工程咨询有限公司
技术研发日:2021.12.31
技术公布日:2022/5/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1