用于视觉检测的多自由度串联精密定位平台的制作方法
1.本实用新型涉及视觉检测技术领域,尤其是用于视觉检测的平台。
背景技术:
2.随着机械工业和信息化社会的快速进步,基于视觉的产品检测模式,目前已经普遍采用。现有视觉检测设备主要在检测平台的上侧和/或下侧安装工业相机,检测时,待检测产品放置到检测平台上并定位,工业相机随即对检测平台上的产品拍摄而获得检测图像,最后由电脑对所得的图像分析处理,达到检测。然而,现有产品中,如手机壳,除了上下侧面检测之外,还需要周边检测;这时做法是,在检测平台上的四周安装工业相机,或者在检测平台上的四周安装反射棱镜,反射产品的周边图像到检测平台的上侧或下侧。这些模式,不仅增加了检测设备的结构复杂性,而且成本相对高,不利于工业生产的长远发展,需要进一步改进。
技术实现要素:
3.本实用新型的目的在于提供一种用于视觉检测的多自由度串联精密定位平台,很好地解决上述技术问题。
4.为达到上述目的,本实用新型采用如下技术方案:
5.用于视觉检测的多自由度串联精密定位平台,其包括有:
6.支撑结构,
7.直线移动结构,该直线移动结构组装在支撑结构上并沿支撑结构预设的直线导轨往复移动,所述的直线移动结构上设有架桥空间,定义直线移动结构是沿空间直角坐标系的x轴移动;
8.支撑板,该支撑板组装在直线移动结构的架桥空间中并可在空间直角坐标系中围绕y轴转动,支撑板是按设定角度转动;
9.垂直回转机构,该垂直回转机构安装在支撑板上,垂直回转机构包括有驱动部分和回转座,回转座通过驱动部分驱动来实现绕空间直角坐标系z轴旋转,回转座上设有治具,待检测的产品放置在该治具上。
10.上述方案进一步是,所述直线移动结构上的架桥空间为u形,支撑板的两端通过轴承结构组装到架桥空间的左右侧壁上,且支撑板的其中一端连接第一电机,该第一电机控制支撑板转动角度。
11.上述方案进一步是,所述垂直回转机构的驱动部分是dc电机,回转座叠加在驱动部分的上端并连接驱动部分的输出端。
12.本实用新型提供的用于视觉检测的多自由度串联精密定位平台,采用串联方式将直线移动结构、支撑板及垂直回转机构联系在一起,并协作运动,三种运动方式互相带动却互不干扰,减少不必要的误差,定位效率高,其操作容易、驱动简易、运动形式多样化,治具设置在垂直回转机构上。检测工作时,将待检测的产品放置在治具上,即可配合工业相机进
行视觉检测,利用支撑板的绕y轴转动及垂直回转机构的绕z轴转动,还可实现借用正面的工业相机来检测产品的周边,达到在线多面检测,平台结构简单,生产成本低廉、制造过程不繁杂、生产周期短,用于视觉检测,对企业的生产效益带来可观的提升。
13.附图说明:
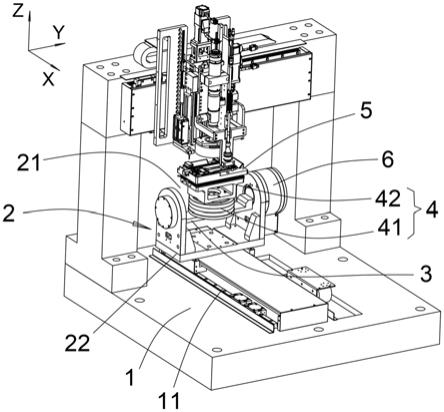
14.附图1为本实用新型其一实施例结构示意图;
15.附图2为图1实施例的局部结构放大示意图。
16.具体实施方式:
17.以下将结合附图对本实用新型的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本实用新型的目的、特征和效果。
18.需要说明的是,在本实用新型的描述中,术语“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。
19.参阅图1、2所示,是本实用新型的较佳实施例示意图,本实用新型有关一种用于视觉检测的多自由度串联精密定位平台,其包括有支撑结构1、直线移动结构2、支撑板3及垂直回转机构4,该直线移动结构2组装在支撑结构1上并沿支撑结构1预设的直线导轨11往复移动,所述的直线移动结构2上设有架桥空间21,定义直线移动结构2是沿空间直角坐标系的x轴移动。在本实施例中,直线移动结构2包括有移动座22及驱动结构(图中未示),移动座22对应支撑结构1的直线导轨11组装,实现在驱动结构的驱动下移动;所述的架桥空间21设置在移动座22上,图中所示的架桥空间21为u形,具有左右间隔的侧壁。所述的支撑板3组装在直线移动结构2的架桥空间21中并可在空间直角坐标系中围绕y轴转动,支撑板3是按设定角度转动,以配合检测需要。在本实施例中,支撑板3类似秋千板设置,支撑板3的两端通过轴承结构组装到架桥空间21的左右侧壁上,且支撑板3的其中一端连接第一电机6,该第一电机6控制支撑板3转动角度,优选地,第一电机6是dc电机,通过搭配相应的分度器来控制支撑板3转动角度。该垂直回转机构4安装在支撑板3上,垂直回转机构4包括有驱动部分41和回转座42,回转座42通过驱动部分41驱动来实现绕空间直角坐标系z轴旋转,回转座42上设有治具5,待检测的产品放置在该治具5上,即可用于检测。在本实施例中,优选地,驱动部分41也是dc电机,结构简单,方便组装,且运动精准、可靠,回转座42叠加在驱动部分41的上端并连接驱动部分41的输出端,有效缩小高度,整体的体积小;图中的治具5也是叠加在回转座42。
20.以手机壳检测为例,工作时,将手机壳放置在治具5上并稳固,工业相机设置在治具5的上方,在打光配合下,工业相机可抓取手机壳上侧面的图像并用于检测,其中还可以利用直线移动结构2的移动和/或垂直回转机构4的转动,以此来配合工业相机可抓取手机壳上侧面的相应部位。当需要检测手机壳的周边时,可通过第一电机6控制支撑板3转动一角度,使手机壳需要检测的周边正对工业相机,以便抓取检测图像,对应搭配垂直回转机构4的转动时,可达到手机壳的四周换位检测,如此即可实现在线多面检测。
21.本实用新型提供的用于视觉检测的多自由度串联精密定位平台,采用串联方式将直线移动结构、支撑板及垂直回转机构联系在一起,并协作运动,三种运动方式互相带动却
互不干扰,减少不必要的误差,定位效率高,其操作容易、驱动简易、运动形式多样化,治具设置在垂直回转机构上。检测工作时,将待检测的产品放置在治具上,即可配合工业相机进行视觉检测,利用支撑板的绕y轴转动及垂直回转机构的绕z轴转动,还可实现借用正面的工业相机来检测产品的周边,达到在线多面检测,平台结构简单,生产成本低廉、制造过程不繁杂、生产周期短,用于视觉检测,对企业的生产效益带来可观的提升。
22.当然,以上结合实施方式对本实用新型做了详细说明,只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人了解本实用新型的内容并加以实施,因此,凡根据本实用新型精神实质所做的等效变化或修饰,都应涵盖在本实用新型的保护范围内。
技术特征:
1.用于视觉检测的多自由度串联精密定位平台,其特征在于,包括有:支撑结构(1),直线移动结构(2),该直线移动结构(2)组装在支撑结构(1)上并沿支撑结构(1)预设的直线导轨(11)往复移动,所述的直线移动结构(2)上设有架桥空间(21),定义直线移动结构(2)是沿空间直角坐标系的x轴移动;支撑板(3),该支撑板(3)组装在直线移动结构(2)的架桥空间(21)中并可在空间直角坐标系中围绕y轴转动,支撑板(3)是按设定角度转动;垂直回转机构(4),该垂直回转机构(4)安装在支撑板(3)上,垂直回转机构(4)包括有驱动部分(41)和回转座(42),回转座(42)通过驱动部分(41)驱动来实现绕空间直角坐标系z轴旋转,回转座(42)上设有治具(5),待检测的产品放置在该治具(5)上。2.根据权利要求1所述的用于视觉检测的多自由度串联精密定位平台,其特征在于,所述直线移动结构(2)上的架桥空间(21)为u形,支撑板(3)的两端通过轴承结构组装到架桥空间(21)的左右侧壁上,且支撑板(3)的其中一端连接第一电机(6),该第一电机(6)控制支撑板(3)转动角度。3.根据权利要求1所述的用于视觉检测的多自由度串联精密定位平台,其特征在于,所述垂直回转机构(4)的驱动部分(41)是dc电机,回转座(42)叠加在驱动部分(41)的上端并连接驱动部分(41)的输出端。
技术总结
本实用新型涉及用于视觉检测的多自由度串联精密定位平台,其具有支撑结构、直线移动结构、支撑板及垂直回转机构,直线移动结构组装在支撑结构上并设有架桥空间,支撑板组装在直线移动结构的架桥空间中并可按设定角度转动;垂直回转机构安装在支撑板上,垂直回转机构包括有驱动部分和回转座,回转座通过驱动部分驱动来旋转,回转座上设有治具,待检测的产品放置在该治具上。本实用新型采用串联方式将部件联系在一起,并协作运动,三种运动方式互相带动却互不干扰,减少不必要的误差,定位效率高,其操作容易、驱动简易、运动形式多样化,满足在线多面检测,结构简单,生产成本低廉,用于视觉检测,对企业的生产效益带来可观的提升。升。升。
技术研发人员:吕成威
受保护的技术使用者:东莞市乐琪光电科技有限公司
技术研发日:2021.07.15
技术公布日:2022/3/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1