交流伺服电机位置信号采集电路
1.本发明涉及数字交流伺服系统,尤其涉及一种交流伺服电机位置信号采集电路。
背景技术:
2.提升国产伺服驱动器的性价比也应是厂商追求的重要目标。由于早期的单片机(mcu)或数字信号处理器(dsp)性能不足等原因,国产伺服驱动器的控制电路多采用cpld+dsp的架构,该架构的缺点是电路复杂,成本偏高。意法半导体(st)基于arm cortex-m4内核的stm32f4系列单片机自带浮点运算单元和自适应实时加速器,工作频率高达168mhz,更有数字信号处理指令集来提高芯片的运算水平,这些优异的性能,有利于伺服驱动器中矢量控制、比例积分(pi)、前馈补偿等复杂数学算法的实现,同时stm32f系列单片机拥有丰富的外设资源和专业级的电机控制接口,完全可以脱离cpld芯片,单独作为伺服驱动器的核心控制单元,实现单核的控制电路架构。
技术实现要素:
3.发明目的:本发明目的是克服现有技术的不足,提供一种交流伺服电机位置信号采集电路。
4.技术方案:一种交流伺服电机位置信号采集电路,电阻r77一端接入外部触发信号ppi_1,电阻r77另一端接光电耦合器u26的引脚2,
5.光电耦合器u26的引脚2接二极管d11阴极,二极管d11阳极接引脚3,引脚2和引脚3之间还串接电容c110,电阻r79与电容c110并联,
6.电阻r76一端接入正脉冲信号,电阻r76另一端接光电耦合器u26的引脚2,
7.电阻r80一端接入负脉冲信号,电阻r80另一端接光电耦合器u26的引脚3,
8.光电耦合器u26的引脚8和引脚7短接并接入正电源,
9.引脚8接电容c107第一端,电容c107另一端接地、接引脚5、接电容c111第一端,
10.引脚8接电阻r78第一端,电阻r78另一端接引脚6、接电容c111另一端、接单片机引脚89;
11.电阻r87一端接入外部触发信号ppi_2,电阻r87另一端接光电耦合器u29的引脚2,
12.光电耦合器u29的引脚2接二极管d12阴极,二极管d12阳极接引脚3,引脚2和引脚3之间还串接电容c113,电阻r90与电容c113并联,
13.电阻r88一端接入正外部时钟信号,电阻r88另一端接光电耦合器u29的引脚2,
14.电阻r91一端接入负外部时钟信号,电阻r91另一端接光电耦合器u29的引脚3,
15.光电耦合器u29的引脚8和引脚7短接并接入正电源,
16.引脚8接电容c112第一端,电容c112另一端接地、接引脚5、接电容c120第一端,
17.引脚8接电阻r89第一端,电阻r89另一端接引脚6、接电容c120另一端、接单片机引脚38;
18.单片机引脚38与引脚30短接。
19.优选地,正电源为正5v直流电压。
20.优选地,电容c110与电阻r79组成滤波器;电容c113与电阻r90组成滤波器。
21.优选地,电容c110、c113的电容值为0.47uf。
22.优选地,电阻r79和电阻r90的阻值为10kω。
23.有益效果:与现有技术相比,本发明具有如下显著的优点:本发明提高了位置脉冲信号的抗干扰能力、稳定性、及时性和快速性。且充分利用stm32f4外设功能,简化了电路,可以接收可编程逻辑控制器(plc)或数控系统(cnc)发出的位置脉冲信号,以及与测量伺服电机转速的光电增量式编码器输出信号。
附图说明
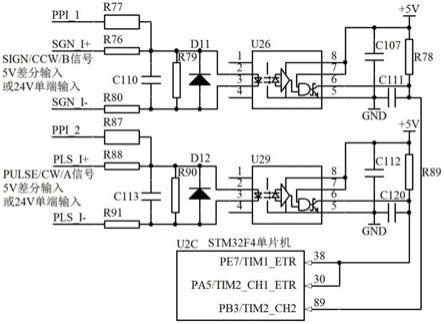
24.图1为本发明的电路示意图。
具体实施方式
25.下面结合附图对本发明的技术方案作进一步说明。
26.如图1所示,本发明的硬件架构以stm32f4为核心,提供了一种基于rs-422标准的交流伺服电机位置指令信号采集电路。利用其部分引脚实现对交流伺服电机发出三种常见的位置指令脉冲信号的采集,接收来自可编程控制器或数控系统发出的位置指令。
27.其中,sign为有符号脉冲信号,
28.正信号用sgni+表示,负信号用sgni-表示;
29.ccw表示逆时针脉冲,cw表示顺时针脉冲;
30.a表示两相正交脉冲信号的a相,b表示两相正交脉冲信号的b相;
31.ppi为外部触发信号,pls为外部时钟信号。
32.u26和u29是高速光电耦合器,起到电平的转换和信号的隔离作用。其中,a、b正交脉冲也是光电增量式编码器信号输出格式。
33.电路的具体连接方式如下:
34.电阻r77一端接入外部触发信号ppi_1,电阻r77另一端接光电耦合器u26的引脚2,
35.光电耦合器u26的引脚2接二极管d11阴极,二极管d11阳极接引脚3,引脚2和引脚3之间还串接电容c110,电阻r79与电容c110并联,
36.电阻r76一端接入正脉冲信号,电阻r76另一端接光电耦合器u26的引脚2,
37.电阻r80一端接入负脉冲信号,电阻r80另一端接光电耦合器u26的引脚3,
38.光电耦合器u26的引脚8和引脚7短接并接入正电源,
39.引脚8接电容c107第一端,电容c107另一端接地、接引脚5、接电容c111第一端,
40.引脚8接电阻r78第一端,电阻r78另一端接引脚6、接电容c111另一端、接单片机引脚89。单片机stm32f4的引脚89完成对sign/ccw/b信号5v差分信号采集。
41.电阻r87一端接入外部触发信号ppi_2,电阻r87另一端接光电耦合器u29的引脚2,
42.光电耦合器u29的引脚2接二极管d12阴极,二极管d12阳极接引脚3,引脚2和引脚3之间还串接电容c113,电阻r90与电容c113并联,
43.电阻r88一端接入正外部时钟信号,电阻r88另一端接光电耦合器u29的引脚2,
44.电阻r91一端接入负外部时钟信号,电阻r91另一端接光电耦合器u29的引脚3,
45.光电耦合器u29的引脚8和引脚7短接并接入正电源,
46.引脚8接电容c112第一端,电容c112另一端接地、接引脚5、接电容c120第一端,
47.引脚8接电阻r89第一端,电阻r89另一端接引脚6、接电容c120另一端、接单片机引脚38。单片机stm32f4的引脚38完成对pluse/cw/a信号5v差分信号采集。
48.单片机引脚38与引脚30短接。
49.其中,正电源为正5v直流电压。
50.电容c110与电阻r79组成滤波器;电容c113与电阻r90组成滤波器。
51.电容c110、c113的电容值为0.47uf。
52.电阻r79和电阻r90的阻值为10kω。
53.本发明的具体实施方式中,未涉及到的说明属于本领域的公知技术,可参考公知技术加以实施。
技术特征:
1.一种交流伺服电机位置信号采集电路,其特征在于,电阻r77一端接入外部触发信号ppi_1,电阻r77另一端接光电耦合器u26的引脚2,光电耦合器u26的引脚2接二极管d11阴极,二极管d11阳极接引脚3,引脚2和引脚3之间还串接电容c110,电阻r79与电容c110并联,电阻r76一端接入正脉冲信号,电阻r76另一端接光电耦合器u26的引脚2,电阻r80一端接入负脉冲信号,电阻r80另一端接光电耦合器u26的引脚3,光电耦合器u26的引脚8和引脚7短接并接入正电源,引脚8接电容c107第一端,电容c107另一端接地、接引脚5、接电容c111第一端,引脚8接电阻r78第一端,电阻r78另一端接引脚6、接电容c111另一端、接单片机引脚89;电阻r87一端接入外部触发信号ppi_2,电阻r87另一端接光电耦合器u29的引脚2,光电耦合器u29的引脚2接二极管d12阴极,二极管d12阳极接引脚3,引脚2和引脚3之间还串接电容c113,电阻r90与电容c113并联,电阻r88一端接入正外部时钟信号,电阻r88另一端接光电耦合器u29的引脚2,电阻r91一端接入负外部时钟信号,电阻r91另一端接光电耦合器u29的引脚3,光电耦合器u29的引脚8和引脚7短接并接入正电源,引脚8接电容c112第一端,电容c112另一端接地、接引脚5、接电容c120第一端,引脚8接电阻r89第一端,电阻r89另一端接引脚6、接电容c120另一端、接单片机引脚38;单片机引脚38与引脚30短接。2.根据权利要求1所述的交流伺服电机位置信号采集电路,其特征在于,所述正电源为正5v直流电压。3.根据权利要求1所述的交流伺服电机位置信号采集电路,其特征在于,所述电容c110与电阻r79组成滤波器;电容c113与电阻r90组成滤波器。4.根据权利要求1所述的交流伺服电机位置信号采集电路,其特征在于,所述电容c110、c113的电容值为0.47uf。5.根据权利要求1所述的交流伺服电机位置信号采集电路,其特征在于,所述电阻r79和电阻r90的阻值为10kω。
技术总结
本发明公开了一种交流伺服电机位置信号采集电路,电阻R77一端接入外部触发信号PPI_1,电阻R77另一端接光电耦合器U26的引脚2,光电耦合器U26的引脚2接二极管D11阴极,二极管D11阳极接引脚3,引脚2和引脚3之间还串接电容C110,电阻R79与电容C110并联,电阻R76一端接入正脉冲信号,电阻R76另一端接光电耦合器U26的引脚2,电阻R80一端接入负脉冲信号,电阻R80另一端接光电耦合器U26的引脚3,光电耦合器U26的引脚8和引脚7短接并接入正电源,引脚8接电容C107第一端,电容C107另一端接地、接引脚5、接电容C111第一端,引脚8接电阻R78第一端。本发明提出一种以STM32F4为内核的交流伺服电机位置信号采集电路,降低现有伺服电机的控制电路的复杂性,具有切实可行的实用价值。具有切实可行的实用价值。具有切实可行的实用价值。
技术研发人员:陈子涵 崔吉 扶文树 王佳斌 彭琛 苏文仓 张志健
受保护的技术使用者:南京信息职业技术学院
技术研发日:2021.07.28
技术公布日:2022/3/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1