一种牵引车与挂车夹角的测量装置的制作方法
1.本实用新型涉及汽车辅助驾驶技术领域,具体为一种牵引车与挂车夹角的测量装置。
背景技术:
2.目前市场随着智慧交通事业的日益发展,对车辆行驶实时监控记录要求也越来越高。市面上通用的车辆一般有两种,一种为车头跟车架体式,转弯时仅前轮轴转动,车头与车身一起转动。另一种为车头与车架分体式的牵引式拖车,转弯时车头单独转弯,然后通过车头牵引销带动车架前进。一般小型车辆均为第一种方式。而对于大型车辆,如果采用第一种方式,就会车身太长导致很难转弯。
3.市面上有很多车辆全景系统,目前都是基于一体式车头与车身设计的,通过设置于车身与车头的多个摄像头,实施采集数据与图像拼接,实现系统全景摄像。但是对于分体式牵引车,因为在转弯时,车头与车身不是一起转动,因此采用传统的图像拼接技术,再转弯时就会图像失真,尤其是在大角度转弯时,图像失真特别厉害,达不到实施跟踪录像的目的,也不利于司机对车辆全方位观察。
4.如果可以实时测量牵引车与挂车之间的夹角,则在车辆转弯时可以准确地拼接出车辆的全车影像。因此,如何测量牵引车与挂车夹角是当前亟需解决的技术问题。
技术实现要素:
5.本实用新型的目的在于提供一种牵引车与挂车夹角的测量装置,可实时测量牵引车与挂车之间的夹角。
6.本实用新型实施例中,提供了一种牵引车与挂车夹角的测量装置,所述牵引车与挂车通过牵引销相连接,所述测量装置包括设置于所述牵引车上的无线距离探测器及设置于所述挂车上的反射镜,在所述牵引车与所述挂车的夹角为零时,所述无线距离探测器、所述反射镜与所述牵引销位于与所述挂车及所述牵引车行驶方向平行的一条直线上。
7.本实用新型实施例中,所述无线距离探测器采用激光探测器。
8.本实用新型实施例中,所述无线距离探测器采用超声波探测器。
9.本实用新型实施例中,所述无线距离探测器安装于所述牵引销和所述反射镜之间。
10.本实用新型实施例中,所述反射镜安装于所述牵引销和所述无线距离探测器之间。
11.本实用新型实施例中,所述测量装置还包括与所述无线距离探测器相连接的计算模块。
12.与现有技术相比较,采用本本实用新型的牵引车与挂车夹角的测量装置,在所述牵引车上设置了无线距离探测器,在所述挂车上设置反射镜,并且所述牵引车与所述挂车的夹角为零时,所述无线距离探测器、所述反射镜与所述牵引销设置于一条直线上,当所述
牵引车与所述挂车之间存在夹角时,所述无线距离探测器、所述反射镜及所述牵引销形成一个三角形,由于所述无线距离探测器与所述牵引销之间的距离以及所述反射镜与所述牵引销之间的距离是一个定值,可以根据所述无线距离探测器探测到的与所述反射镜之间的距离计算出三角形的各个角度,从而得出所述牵引车与所述挂车之间的夹角;并且,由于采用无线距离探测器,安装简单,测距精准。
附图说明
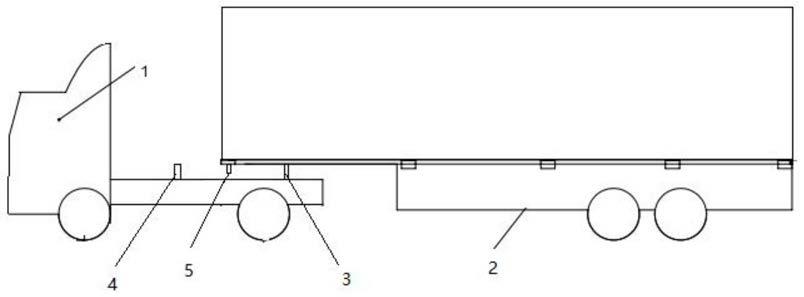
13.图1是本实用新型第一实施例的牵引车与挂车夹角的测量装置的结构示意图。
14.图2是本实用新型第一实施例计算牵引车与挂车夹角的原理图。
15.图3是本实用新型第二实施例的牵引车与挂车夹角的测量装置的结构示意图。
16.图4是本实用新型第二实施例计算中牵引车与挂车夹角的原理图。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
18.以下结合具体实施例对本实用新型的实现进行详细描述。
19.如图1所示,本实用新型第一实施例中,提供了一种牵引车与挂车夹角的测量装置,所述牵引车1与所述挂车2通过牵引销3相连接,所述测量装置包括设置于所述牵引车1上的无线距离探测器4、设置于所述挂车上的反射镜5及设置于所述牵引车1上的计算模块(图未示)。所述无线距离探测器4用于发射广角无线信号,并接收所述反射镜5反射回来的无线信号,从而探测所述无线距离探测器4与所述反射镜5之间的距离。所述无线距离探测器4可以采用激光探测器,也可以采用超声波探测器。所述计算模块与所述无线距离探测器4相连接,用于根据所述无线距离探测器4探测的距离计算所述牵引车1与所述挂车2之间的角度。需要说明的是,所述计算模块通常为设置于所述牵引车1中控系统中的mcu,以便于实时提供角度信号给所述牵引车1的中控系统,所述无线距离探测器4也需要设置在所述牵引车1上,以便于与所述计算模块保持通信连接。
20.如图2所示,在所述牵引车1与所述挂车2的夹角为零时,所述无线距离探测器4、所述反射镜5与所述牵引销3位于与所述挂车2及所述牵引车1行驶方向平行的一条直线上,分别位于a点、b点和c点。且所述无线距离探测器4安装于所述牵引销3和所述反射镜5之间。在这种安装方式下,所述牵引销3(c点)与所述无线距离探测器4(a点)和所述反射镜5(b点)之间的距离分别为a和b,分别为定值。所述无线距离探测器4(a点)与所述反射镜5(b点)之间的距离为c,距离c为一个变量,由所述无线距离探测器4探测得到。
21.当车辆转向时,所述无线距离探测器4(a点)、所述反射镜5(b点)和所述牵引销3(c点)三点形成一个三角形abc。在这个三角形abc中,ca长是a,cb长是b,ab长为c。那么:
22.c2=a2+b
2-2*a*b*cosc
23.这样,所述计算模块根据所述无线距离探测器4探测得到的距离c,就可以求出所述牵引车1和所述挂车2之间的夹角c了。
24.如图3及图4所示,与本实用新型第一实施例不同的是,本实用新型第二实施例中,
所述反射镜5安装于所述牵引销3和所述无线距离探测器4之间。所述牵引车1和所述挂车2之间的夹角c的计算方式与上述相同,在此不再赘述。
25.综上所述,采用本本实用新型的牵引车与挂车夹角的测量装置,在所述牵引车上设置了无线距离探测器,在所述挂车上设置反射镜,并且所述牵引车与所述挂车的夹角为零时,所述无线距离探测器、所述反射镜与所述牵引销设置于一条直线上,当所述牵引车与所述挂车之间存在夹角时,所述无线距离探测器、所述反射镜及所述牵引销形成一个三角形,由于所述无线距离探测器与所述牵引销之间的距离以及所述反射镜与所述牵引销之间的距离是一个定值,可以根据所述无线距离探测器探测到的与所述反射镜之间的距离计算出三角形的各个角度,从而得出所述牵引车与所述挂车之间的夹角;并且,由于采用无线距离探测器,安装简单,测距精准。
26.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种牵引车与挂车夹角的测量装置,所述牵引车与挂车通过牵引销相连接,其特征在于,所述测量装置包括设置于所述牵引车上的无线距离探测器及设置于所述挂车上的反射镜,在所述牵引车与所述挂车的夹角为零时,所述无线距离探测器、所述反射镜与所述牵引销位于与所述挂车及所述牵引车行驶方向平行的一条直线上。2.如权利要求1所述的牵引车与挂车夹角的测量装置,其特征在于,所述无线距离探测器采用激光探测器。3.如权利要求1所述的牵引车与挂车夹角的测量装置,其特征在于,所述无线距离探测器采用超声波探测器。4.如权利要求1所述的牵引车与挂车夹角的测量装置,其特征在于,所述无线距离探测器安装于所述牵引销和所述反射镜之间。5.如权利要求1所述的牵引车与挂车夹角的测量装置,其特征在于,所述反射镜安装于所述牵引销和所述无线距离探测器之间。6.如权利要求1所述的牵引车与挂车夹角的测量装置,其特征在于,还包括与所述无线距离探测器相连接的计算模块。
技术总结
本实用新型提供了一种牵引车与挂车夹角的测量装置,所述牵引车与挂车通过牵引销相连接,所述测量装置包括设置于所述牵引车上的无线距离探测器及设置于所述挂车上的反射镜,在所述牵引车与所述挂车的夹角为零时,所述无线距离探测器、所述反射镜与所述牵引销位于与所述挂车及所述牵引车行驶方向平行的一条直线上。采用本实用新型的测量装置,可实时测量牵引车和挂车之间的夹角。引车和挂车之间的夹角。引车和挂车之间的夹角。
技术研发人员:程连强 王春元 何牧 朱岚斐 范福川
受保护的技术使用者:盛视科技股份有限公司
技术研发日:2021.11.09
技术公布日:2022/5/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1