一种环形测力数字传感器的制作方法
1.本实用新型涉及数字传感器技术领域,尤其涉及一种环形测力数字传感器。
背景技术:
2.随着科技的发展和进步,利用机器人做外科手术已日益普及,医生通过机器人可以在不触碰患者的情况下进行手术,而且机器人手术比医生直接手术的精确度更高,在需要进行切口时所需切口更小,减少患者疼痛、流血及外伤,有利于患者康复。
3.但是,目前市场上的手术机器人由于手术机械臂不够灵活缺少手术安全保障,只适用于手术医生在现场时进行操作,无法对病人进行远程手术,其主要原因在于现有的数字传感器无法安装到机械臂的旋转关节处,机械臂旋转摩擦力大。而且,现有的用于手术机器人的传感器其扭力信号不稳定,设备线性度也较差,无法满足实际手术时的要求。
4.因此,结合上述存在的技术问题,有必要提供一种新的技术方案。
技术实现要素:
5.本实用新型的目的是提供一种能够安装在机械臂旋转关节处且扭力信号稳定、线性度更好的环形测力数字传感器。
6.为解决上述技术问题,本实用新型提供了一种环形测力数字传感器,具体技术方案如下所述:
7.一种环形测力数字传感器,用于将机械臂的扭力转化为数字信号并发送至数字采集系统中,包括弹性体,所述弹性体用于安装在机械臂的旋转关节处;
8.所述弹性体包括依次连接的首端、中段和尾端,所述首端、尾端和中段均呈圆柱状,中段的直径小于首端和尾端的直径;
9.所述中段外部套设有压环,所述压环和中段之间设有至少一个应变片,所述应变片与中段外表面贴合。
10.优选的是,所述首端和尾端上分别设有多个安装孔,所述安装孔以弹性体的轴线为中心均匀排布。
11.优选的是,所述安装孔轴线平行于弹性体的轴线设置。
12.优选的是,所述弹性体和数字采集系统之间设有电缆组件,电缆组件穿过由尾端上其中一个安装孔形成的电缆孔与应变片连接。
13.优选的是,所述压环外侧还包覆有硅胶圈,所述硅胶圈靠近尾端的一侧设有缺口,所述缺口的位置与电缆孔对应以便于电缆组件一端伸入硅胶圈中与应变片相连。
14.优选的是,所述压环上开设有窗口,所述窗口与应变片一一对应。
15.优选的是,所述压环的材质为柔性pcb。
16.本实用新型的一种环形测力数字传感器,具有如下有益效果:
17.(1)本实用新型的环形测力数字传感器,通过弹性体的多级圆柱设计,提高了传感器安装自由度,能够应用于机械臂的旋转关节处,有利于减少机械臂的关节处摩擦,保证了
机械臂的操作空间,同时,在弹性体首端和尾端的安装孔降低了传感器的线性误差、提高了设备精度,能够保证传感器在安装时的各种角度需求,有利于降低加工成本;
18.(2)本实用新型的环形测力数字传感器,通过与弹性体中段配合的应变片、压环和硅胶圈,提高了传感器扭力信号的稳定性,进而使机械臂更能满足远程手术的精度需求;
19.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
20.为了更清楚地说明本实用新型的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
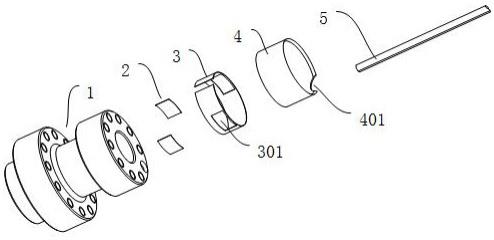
21.图1 为一种环形测力数字传感器的结构示意图;
22.图2 为图1中弹性体的结构示意图。
23.其中,1-弹性体;101-首端;102-尾端;103-中段;104-安装孔;105-电缆孔;2-应变片;3-压环;301-窗口;4-硅胶圈;401-缺口;5-电缆组件。
具体实施方式
24.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
实施例
25.请参阅图1至图2,一种环形测力数字传感器,用于将机械臂的扭力转化为数字信号并发送至数字采集系统中,包括弹性体1,包括弹性体1,弹性体1用于安装在机械臂的旋转关节处;
26.弹性体1包括依次连接的首端101、中段103和尾端102,首端101、尾端102和中段103均呈圆柱状,中段103的直径小于首端101和尾端102的直径;
27.中段103外部套设有压环3,压环3和中段103之间设有至少一个应变片2,应变片2与中段103外表面贴合,优选的,应变片2的数量为两个且沿弹性体1的轴线对称设置。
28.首端101和尾端102上分别设有多个安装孔104,安装孔104以弹性体1的轴线为中心均匀排布,安装孔104轴线平行于弹性体1的轴线设置,优选的,安装孔104为螺纹通孔。
29.弹性体1和数字采集系统之间设有电缆组件5,电缆组件5穿过由尾端102上其中一个安装孔104形成的电缆孔105与应变片2连接,电缆孔105的外端设有沉头以便于区分和安装。
30.压环3外侧还包覆有硅胶圈4,硅胶圈4靠近尾端102的一侧设有缺口401,缺口401的位置与电缆孔105对应以便于电缆组件5一端伸入硅胶圈4中与应变片相连。
31.压环3上开设有窗口301,窗口301与应变片2一一对应,压环3通过窗口301避让应
变片与电缆组件5的连接处。压环3的材质为柔性pcb。
32.本实施例的工作原理在于:传感器通过弹性体1上首端101和尾端102上的安装孔104固定在机械臂的旋转关节处,机械臂扭动时中段103发生微变形,使得贴合在中段外表面的应变片2感知变形后产生应变信号,应变信号通过电缆组件5向外传输并由惠斯通电桥输出为模拟信号,模拟信号经放大器放大处理后产生数字信号并传输至数字采集系统。
33.本实用新型的有益效果是:通过弹性体的多级圆柱设计,提高了传感器安装自由度,能够应用于机械臂的旋转关节处,有利于减少机械臂的关节处摩擦,保证了机械臂的操作空间,同时,在弹性体首端和尾端的安装孔降低了传感器的线性误差、提高了设备精度,能够保证传感器在安装时的各种角度需求,有利于降低加工成本;通过与弹性体中段配合的应变片、压环和硅胶圈,提高了传感器扭力信号的稳定性,进而使机械臂更能满足远程手术的精度需求。
34.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改和变型。
技术特征:
1.一种环形测力数字传感器,用于将机械臂的扭力转化为数字信号并发送至数字采集系统中,其特征在于:包括弹性体(1),所述弹性体(1)用于安装在机械臂的旋转关节处;所述弹性体(1)包括依次连接的首端(101)、中段(103)和尾端(102),所述首端(101)、尾端(102)和中段(103)均呈圆柱状,中段(103)的直径小于首端(101)和尾端(102)的直径;所述中段(103)外部套设有压环(3),所述压环(3)和中段(103)之间设有至少一个应变片(2),所述应变片(2)与中段(103)外表面贴合。2.根据权利要求1所述的环形测力数字传感器,其特征在于:所述首端(101)和尾端(102)上分别设有多个安装孔(104),所述安装孔(104)以弹性体(1)的轴线为中心均匀排布。3.根据权利要求2所述的环形测力数字传感器,其特征在于:所述安装孔(104)轴线平行于弹性体(1)的轴线设置。4.根据权利要求3所述的环形测力数字传感器,其特征在于:所述弹性体(1)和数字采集系统之间设有电缆组件(5),电缆组件(5)穿过由尾端(102)上其中一个安装孔(104)形成的电缆孔(105)与应变片(2)连接。5.根据权利要求4所述的环形测力数字传感器,其特征在于:所述压环(3)外侧还包覆有硅胶圈(4),所述硅胶圈(4)靠近尾端(102)的一侧设有缺口(401),所述缺口(401)的位置与电缆孔(105)对应以便于电缆组件(5)一端伸入硅胶圈(4)中与应变片相连。6.根据权利要求1所述的环形测力数字传感器,其特征在于:所述压环(3)上开设有窗口(301),所述窗口(301)与应变片(2)一一对应。7.根据权利要求1所述的环形测力数字传感器,其特征在于:所述压环(3)的材质为柔性pcb。
技术总结
本实用新型公开了一种环形测力数字传感器,用于将机械臂的扭力转化为数字信号并发送至数字采集系统中,包括弹性体,所述弹性体用于安装在机械臂的旋转关节处;所述弹性体包括依次连接的首端、中段和尾端,所述首端、尾端和中段均呈圆柱状,中段的直径小于首端和尾端的直径;所述中段外部套设有压环,所述压环和中段之间设有至少一个应变片,所述应变片与中段外表面贴合。本实用新型的环形测力数字传感器,通过弹性体的多级圆柱设计,提高了传感器安装自由度,能够应用于机械臂的旋转关节处,有利于减少机械臂的关节处摩擦,保证了机械臂的操作空间。的操作空间。的操作空间。
技术研发人员:廉鑫斌
受保护的技术使用者:霍丁格必凯(苏州)电子测量技术有限公司
技术研发日:2021.11.11
技术公布日:2022/4/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1