组合导航系统、导航设备及车辆的制作方法
本申请涉及导航,具体而言,涉及一种组合导航系统、导航设备及车辆。
背景技术:
1、目前,车辆上的导航系统有两种方案,第一种是采用arm控制的导航系统,第二种是基于数字信号处理器dsp的导航系统,其中,arm控制的系统擅长做控制管理,但对应专项任务处理能力比较弱,如果要实现相同的运算能力,那就只能提高arm控制器的时钟频率,从而导致整个系统的功耗及其复杂度提高。另一方面,基于数字信号处理器dsp的导航系统,其具有快速的数学运算能力,但是其外设接口少,要外接总线转换器来拓展接口来满足系统要求,导致外围设备多而且dsp要将时间分配到各个外设的控制上,运算性能减弱。
技术实现思路
1、本申请实施例的目的在于提供一种组合导航系统、导航设备及车辆,用以在保障运算能力的同时,提供更多的接口。
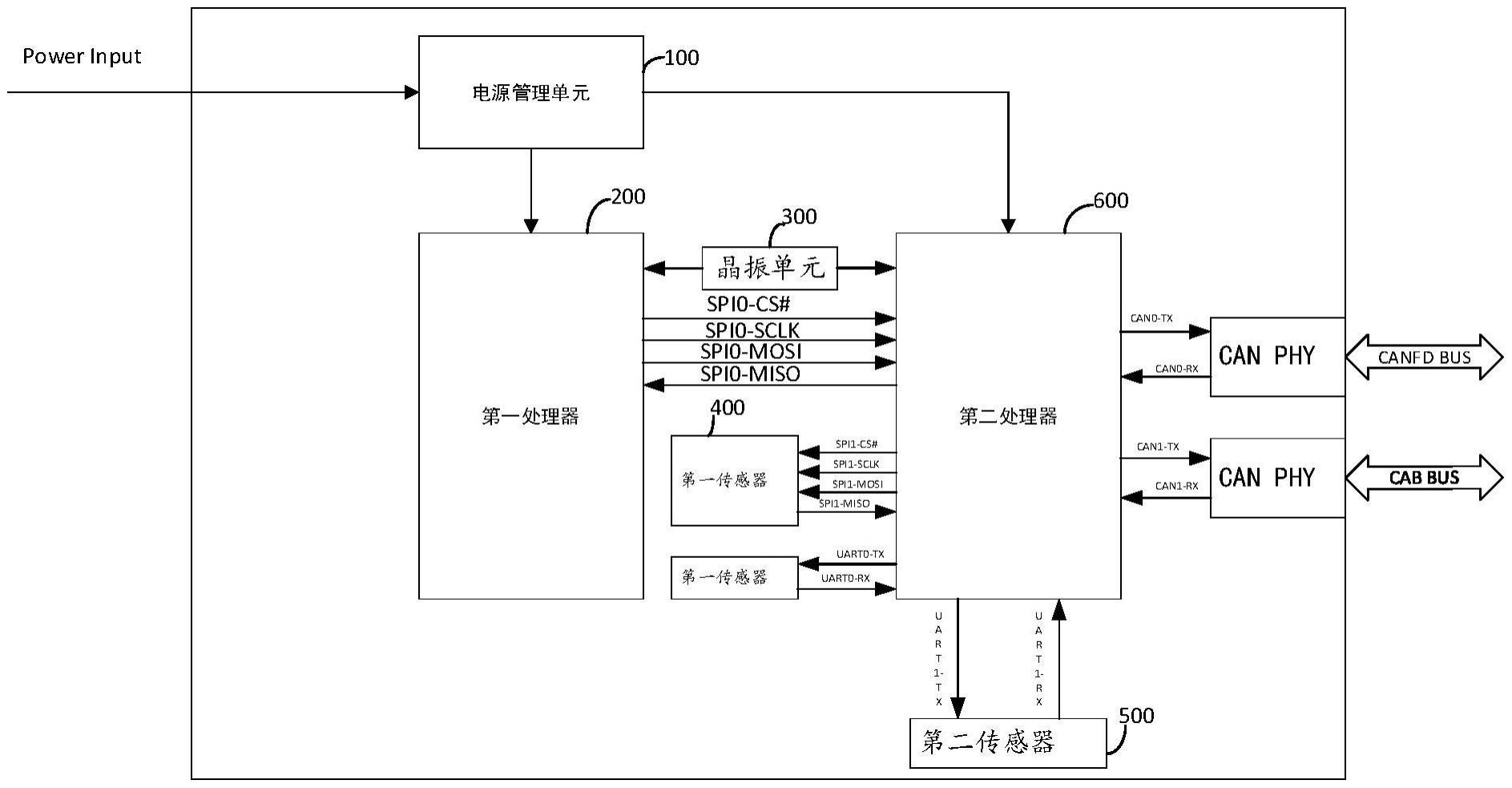
2、为此,本申请第一方面公开一种组合导航系统,其包括:
3、第一处理器,所述第一处理器为数字信号处理器;
4、第二处理器,与所述第一处理器电性连接,所述第二处理器为mcu;.
5、导航传感器组件,用于生成导航数据,所述导航传感器组件与所述第二处理器电性连接,并向所述第二处理器输入所述导航数据;
6、以及,所述第二处理器用于将所述导航数据输入至所述第一处理器,所述第一处理器用于对所述导航数据进行解算并将解算结果输入至所述第二处理器。
7、在本申请第一方面中,作为一种可选的实施方式,所述第二处理器通过总线与所述第一处理器电性连接。
8、在本申请第一方面中,作为一种可选的实施方式,所述第二处理器通过spi总线与所述第一处理器电性连接。
9、在本申请第一方面中,作为一种可选的实施方式,所述组合导航系统还包括can收发器,所述can收发器与所述第二处理器电性连接,所述第二处理器通过所述can收发器对外通信。
10、在本申请第一方面中,作为一种可选的实施方式,所述can收发器通过can总线与所述第二处理器电性连接。
11、在本申请第一方面中,作为一种可选的实施方式,所述can收发器包括至少两个,其中,至少一个所述can收发器采用can总线进行对外通信。
12、在本申请第一方面中,作为一种可选的实施方式,至少一个所述can收发器采用canfd总线进行对外通信。
13、在本申请第一方面中,作为一种可选的实施方式,所述导航传感器组件通过总线与所述第二处理器电性连接。
14、在本申请第一方面中,作为一种可选的实施方式,所述导航传感器组件至少包括第一传感器、第二传感器两种不同类型的传感器。
15、在本申请第一方面中,作为一种可选的实施方式,所述第一传感器为惯性检测传感器。
16、在本申请第一方面中,作为一种可选的实施方式,所述惯性检测传感器包括至少两个,其中,至少一个所述惯性检测传感器通过spi总线与所述第二处理器电性连接,至少另一个所述惯性检测传感器通过uart总线与所述第二处理器电性连接。
17、在本申请第一方面中,作为一种可选的实施方式,所述第二传感器包括全球导航卫星系统传感器。
18、在本申请第一方面中,作为一种可选的实施方式,所述全球导航卫星系统传感器通过uart总线与所述第二处理器电性连接。
19、在本申请第一方面中,作为一种可选的实施方式,所述组合导航系统还包括晶振单元,所述晶振单元与所述第一处理器和所述第二处理器电性连接,用于向所述第一处理器和所述第二处理器输出时钟信号。
20、在本申请第一方面中,作为一种可选的实施方式,所述组合导航系统还包括电源管理单元,所述电源管理单元的输入端与外部电源电性连接,所述电源管理单元的输出端与所述第一处理器和所述第二处理器电性连接,用于向所述第一处理器和所述第二处理器供电。
21、在本申请第一方面中,作为一种可选的实施方式,所述电源管理单元包括电压转换电路,所述电压转换电路的输入端与所述外部电源电性连接,所述电压转换电路的输出端与所述第一处理器和所述第二处理器电性连接,所述电压转换电路用于将所述外部电源的输入电压转换为所述第一处理器的输入电压和所述第二处理器的输入电压。
22、在本申请第一方面中,作为一种可选的实施方式,所述第一处理器为浮点型数字信号处理器。
23、本申请第二方面公开一种导航设备,所述导航设备包括本申请第一方面的组合导航系统。
24、本申请第三方面公开一种车辆,所述车辆包括外部系统和本申请第二方面的导航设备,所述导航设备与所述外部系统电性连接,用于为所述外部系统提供导航数据的解算结果。
25、本申请至少具有如下有益技术效果:本申请通过将数字信号处理器和mcu进行组合,一方面能够使得数字信号处理器基于其数学运算能力而专注于导航数据的解算,另一方面通过mcu能够提供更多外设接口,与现有技术中采用单一数字处理器这一方式相比,本申请的第二处理器能够提供更多的接口,进而在保证数字信号处理器的运算性能不降低的前提下,无需增加外接总线转换器以拓展接口而满足系统要求,进而可避免因外围设备多而使数字信号处理器要将时间分配到各个外设的控制上,例如,数字信号处理器无需为轮询采集数据而浪费时间,进而避免数字信号处理器的运算性能减弱而保证数字信号处理器的处理效率。另一方面,与现有技术采用单一mcu这一方式相比,本申请通过数字处理器能够保证运算性能,进而不需要为了提高mcu的运算能力而提高其时钟频率,进而不增加mcu的功耗,即在实现满足相同功能的情况下,数字处理器和mcu组成的系统功耗要低于嵌入式arm处理器芯片的功耗。
技术特征:
1.一种组合导航系统,其特征在于,包括:
2.如权利要求1所述的组合导航系统,其特征在于,所述第二处理器通过总线与所述第一处理器电性连接。
3.如权利要求2所述的组合导航系统,其特征在于,所述第二处理器通过spi总线与所述第一处理器电性连接。
4.如权利要求1所述的组合导航系统,其特征在于,所述组合导航系统还包括can收发器,所述can收发器与所述第二处理器电性连接,所述第二处理器通过所述can收发器对外通信。
5.如权利要求4所述的组合导航系统,其特征在于,所述can收发器通过can总线与所述第二处理器电性连接。
6.如权利要求4所述的组合导航系统,其特征在于,所述can收发器包括至少两个,其中,至少一个所述can收发器采用can总线进行对外通信。
7.如权利要求6所述的组合导航系统,其特征在于,至少一个所述can收发器采用canfd总线进行对外通信。
8.如权利要求1所述的组合导航系统,其特征在于,所述导航传感器组件通过总线与所述第二处理器电性连接。
9.如权利要求1所述的组合导航系统,其特征在于,所述导航传感器组件至少包括第一传感器、第二传感器两种不同类型的传感器。
10.如权利要求9所述的组合导航系统,其特征在于,所述第一传感器为惯性检测传感器。
11.如权利要求10所述的组合导航系统,其特征在于,所述惯性检测传感器包括至少两个,其中,至少一个所述惯性检测传感器通过spi总线与所述第二处理器电性连接,至少另一个所述惯性检测传感器通过uart总线与所述第二处理器电性连接。
12.如权利要求9所述的组合导航系统,其特征在于,所述第二传感器包括全球导航卫星系统传感器。
13.如权利要求12所述的组合导航系统,其特征在于,所述全球导航卫星系统传感器通过uart总线与所述第二处理器电性连接。
14.如权利要求1所述的组合导航系统,其特征在于,所述组合导航系统还包括晶振单元,所述晶振单元与所述第一处理器和所述第二处理器电性连接,用于向所述第一处理器和所述第二处理器输出时钟信号。
15.如权利要求1所述的组合导航系统,其特征在于,所述组合导航系统还包括电源管理单元,所述电源管理单元的输入端与外部电源电性连接,所述电源管理单元的输出端与所述第一处理器和所述第二处理器电性连接,用于向所述第一处理器和所述第二处理器供电。
16.如权利要求15所述的组合导航系统,其特征在于,所述电源管理单元包括电压转换电路,所述电压转换电路的输入端与所述外部电源电性连接,所述电压转换电路的输出端与所述第一处理器和所述第二处理器电性连接,所述电压转换电路用于将所述外部电源的输入电压转换为所述第一处理器的输入电压和所述第二处理器的输入电压。
17.如权利要求1所述的组合导航系统,其特征在于,所述第一处理器为浮点型数字信号处理器。
18.一种导航设备,其特征在于,所述导航设备包括如权利要求1-17任一项所述的组合导航系统。
19.一种车辆,其特征在于,所述车辆包括如权利要求18所述的导航设备和外部系统,所述导航设备与所述外部系统电性连接,用于为所述外部系统提供导航数据的解算结果。
技术总结
本申请提供一种组合导航系统、导航设备及车辆,其中,组合导航系统包括第一处理器,所述第一处理器为数字信号处理器;第二处理器,与所述第一处理器电性连接,所述第二处理器为MCU;导航传感器组件,用于生成导航数据,所述导航传感器组件与所述第二处理器电性连接,并向所述第二处理器输入所述导航数据;以及,所述第二处理器用于将所述导航数据输入至所述第一处理器,所述第一处理器用于对所述导航数据进行解算并将解算结果输入至所述第二处理器。本申请能够在保障运算能力的同时,提供更多的接口。
技术研发人员:朱赞林,司徒春辉,吴雾,王杰德,沈继光
受保护的技术使用者:广州导远电子科技有限公司
技术研发日:20211206
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!