一种自动扶梯自动人行道用驱动主机刹车距离的测试机构的制作方法
1.本实用新型涉及一种刹车距离的测试机构,具体为一种自动扶梯自动人行道用驱动主机刹车距离的测试机构。
背景技术:
2.自动扶梯自动人行道用驱动主机刹车距离是驱动主机总成验收时的最重要参数之一,刹车距离过长过短都会影响乘客乘坐扶梯的安全性。
3.目前驱动主机刹车距离的测试机构结构复杂、需要特别压装工装,因此我们对此做出改进,提出一种自动扶梯自动人行道用驱动主机刹车距离的测试机构。
技术实现要素:
4.为解决现有技术存在驱动主机刹车距离的测试机构结构复杂、需要特别压装工装的缺陷,本实用新型提供一种自动扶梯自动人行道用驱动主机刹车距离的测试机构。
5.为了解决上述技术问题,本实用新型提供了如下的技术方案:
6.本实用新型一种自动扶梯自动人行道用驱动主机刹车距离的测试机构,包括控制器、第一传感器、第二传感器和继电器;
7.所述第一传感器、第二传感器与控制器连接,且电机经继电器与控制器连接,当控制器通过继电器控制电机停机时,控制器同步控制第一传感器、第二传感器对电机停机后的电机转轴的转数进行检测。
8.作为本实用新型的一种优选技术方案,还包括一个mcu模块和显示模块,所述第一传感器、第二传感器与mcu模块连接,所述mcu模块用于接收第一传感器和第二传感器所检测电机停机后的电机主轴的转速数值;所述显示模块与mcu模块连接,用于对转速数值进行显示。
9.作为本实用新型的一种优选技术方案,还包括mcu模块连接的显示模块,所述显示模块用于对转速数值进行显示。
10.作为本实用新型的一种优选技术方案,所述第一传感器测量出电机输出轴处的转速得出第一转数值;所述第二传感器测量出电机输出轴处的转速得出第二转数数值,所述mcu模块对第一转数值和第二转数数值进行处理,得到综合转数数值。
11.作为本实用新型的一种优选技术方案,所述第一传感器、第二传感器为霍尔式转速传感器。
12.作为本实用新型的一种优选技术方案,所述控制器为plc控制器
13.本实用新型的有益效果是:
14.1.该种自动扶梯自动人行道用驱动主机刹车距离的测试机构,通过设有两个转速传感器,使得测量结构简单、无需特别压装工装,将机器安放的普通的木托上即可测量、成本低廉,判定结果可靠;完全还原了现场的工况,将刹车系统的反应时间也计算在内得到的刹车距离同安装梯级之后的距离一致。
附图说明
15.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
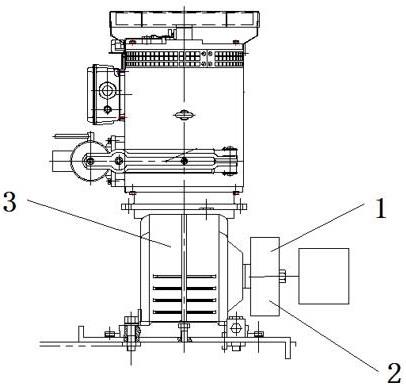
16.图1是本实用新型一种自动扶梯自动人行道用驱动主机刹车距离的测试机构的结构示意图;
17.图2是本实用新型一种自动扶梯自动人行道用驱动主机刹车距离的测试机构的框图。
18.图中:1、第一传感器;2、第二传感器;3、电机。
具体实施方式
19.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
20.实施例:如图1和图2所示,本实用新型一种自动扶梯自动人行道用驱动主机刹车距离的测试机构,包括控制器、第一传感器1、第二传感器2和继电器;
21.第一传感器1、第二传感器2与控制器连接,且电机3经继电器与控制器连接,当控制器通过继电器控制电机3停机时,控制器同步控制第一传感器1、第二传感器2对电机3停机后的电机转轴的转数进行检测。
22.其中,还包括一个mcu模块和显示模块,第一传感器1、第二传感器2与 mcu模块连接,mcu模块用于接收第一传感器1和第二传感器2所检测电机停机后的电机主轴的转速数值;显示模块与mcu模块连接,用于对转速数值进行显示。
23.其中,还包括mcu模块连接的显示模块,显示模块用于对转速数值进行显示。
24.其中,第一传感器1测量出电机输出轴处的转速得出第一转数值;第二传感器2测量出电机输出轴处的转速得出第二转数数值,mcu模块对第一转数值和第二转数数值进行处理,得到综合转数数值。
25.其中,第一传感器1、第二传感器2为霍尔式转速传感器。
26.其中,控制器为plc控制器。
27.工作原理:当控制器通过继电器控制电机3停机时,控制器同步控制第一传感器1、第二传感器2对电机3停机后的电机转轴的转数进行检测,所述第一传感器1测量出电机输出轴处的转速得出第一转数值;所述第二传感器2 测量出电机输出轴处的转速得出第二转数数值,所述mcu模块对第一转数值和第二转数数值进行处理,得到综合转数数值,对第一转数值和第二转数值进行加权计算,例如:取第一转数值*0.5+第二转数值*0.5=综合转数值,得到综合转数值后本领域技术人员即可通过计算得到刹车距离;通过设有两个转速传感器,使得测量结构简单、无需特别压装工装,将机器安放的普通的木托上即可测量、成本低廉,判定结果可靠;完全还原了现场的工况,将刹车系统的反应时间也计算在内得到的刹车距离同安装梯级之后的距离一致。
28.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均
应包含在本实用新型的保护范围之内。
技术特征:
1.一种自动扶梯自动人行道用驱动主机刹车距离的测试机构,包括控制器、第一传感器(1)、第二传感器(2)和继电器,其特征在于;所述第一传感器(1)、第二传感器(2)与控制器连接,且电机(3)经继电器与控制器连接,当控制器通过继电器控制电机(3)停机时,控制器同步控制第一传感器(1)、第二传感器(2)对电机(3)停机后的电机转轴的转数进行检测。2.根据权利要求1所述的一种自动扶梯自动人行道用驱动主机刹车距离的测试机构,其特征在于,还包括一个mcu模块和显示模块,所述第一传感器(1)、第二传感器(2)与mcu模块连接,所述mcu模块用于接收第一传感器(1)和第二传感器(2)所检测电机停机后的电机主轴的转速数值;所述显示模块与mcu模块连接,用于对转速数值进行显示。3.根据权利要求2所述的一种自动扶梯自动人行道用驱动主机刹车距离的测试机构,其特征在于,还包括mcu模块连接的显示模块,所述显示模块用于对转速数值进行显示。4.根据权利要求2所述的一种自动扶梯自动人行道用驱动主机刹车距离的测试机构,其特征在于,所述第一传感器(1)测量出电机输出轴处的转速得出第一转数值;所述第二传感器(2)测量出电机输出轴处的转速得出第二转数数值,所述mcu模块对第一转数值和第二转数数值进行处理,得到综合转数数值。5.根据权利要求1所述的一种自动扶梯自动人行道用驱动主机刹车距离的测试机构,其特征在于,所述第一传感器(1)、第二传感器(2)为霍尔式转速传感器。6.根据权利要求1所述的一种自动扶梯自动人行道用驱动主机刹车距离的测试机构,其特征在于,所述控制器为plc控制器。
技术总结
本实用新型公开了一种自动扶梯自动人行道用驱动主机刹车距离的测试机构,包括控制器、第一传感器、第二传感器和继电器;所述第一传感器、第二传感器与控制器连接,且电机经继电器与控制器连接,当控制器通过继电器控制电机停机时,控制器同步控制第一传感器、第二传感器对电机停机后的电机转轴的转数进行检测;本实用新型通过设有两个转速传感器,使得测量结构简单、无需特别压装工装,将机器安放的普通的木托上即可测量、成本低廉,判定结果可靠;完全还原了现场的工况,将刹车系统的反应时间也计算在内得到的刹车距离同安装梯级之后的距离一致。距离一致。距离一致。
技术研发人员:栗明燕 张勇
受保护的技术使用者:天津市西青区华兴电机制造有限公司
技术研发日:2021.12.31
技术公布日:2022/8/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1