航路标识识别装置、自主航行系统、航路标识识别方法以及程序与流程
本发明涉及航路标识识别装置、自主航行系统、航路标识识别方法以及程序。
背景技术:
1、专利文献1公开了一种自动识别航路标识的自动识别装置。
2、现有技术文献
3、专利文献
4、专利文献1:日本特公平4-76562号公报
技术实现思路
1、发明所要解决的问题
2、然而,海面上漂浮的浮标比船舶小,难以识别远离船舶的浮标的标识内容。
3、本发明鉴于上述课题而提出,其主要目的在于,提供一种能够提高标识内容的识别精度的航路标识识别装置、自主航行系统、航路标识识别方法以及程序。
4、解决问题的技术方案
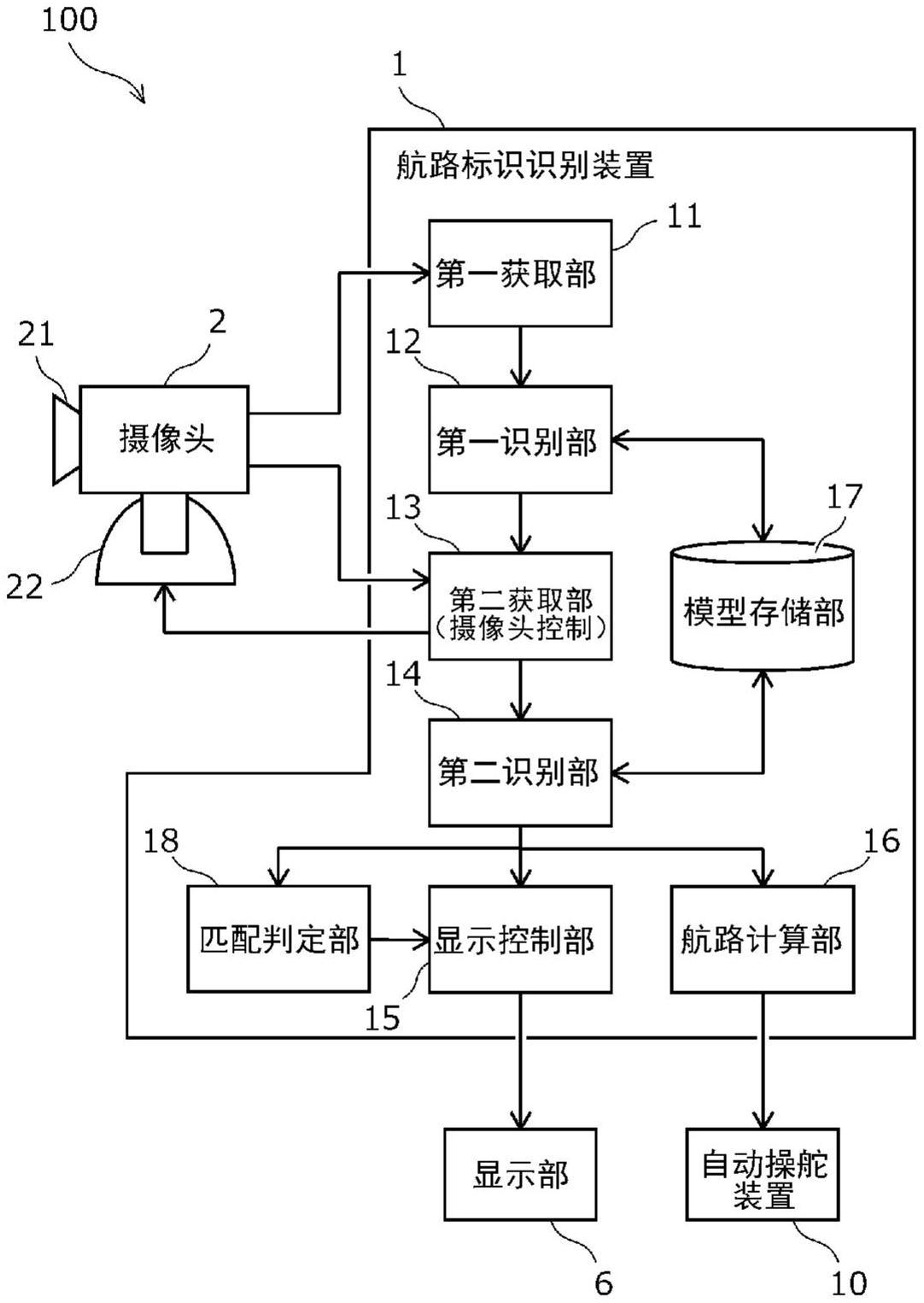
5、为了解决上述问题,本发明的一个方式的航路标识识别装置具有:第一获取部,从设置于船舶的摄像头获取包含浮标的第一图像;第一识别部,识别所述第一图像内的所述浮标的位置;第二获取部,获取与所述第一图像中的包含所述浮标的位置的部分区域对应且分辨率比所述第一图像高的第二图像;以及第二识别部,从所述第二图像识别所述浮标的标识内容。
6、在上述方式中,所述摄像头具有光学变焦功能,所述第二获取部可以通过使所述摄像头对与所述第一图像的所述部分区域对应的范围进行放大拍摄来获取所述第二图像。
7、在上述方式中,所述摄像头具有平移及倾斜(pan tilt)功能,所述第二获取部可以基于所述浮标的位置,使所述摄像头的拍摄方向朝向与所述第一图像的所述部分区域对应的范围。
8、在上述方式中,所述第二获取部可以通过对所述第一图像的所述部分区域进行高析像度化来获取所述第二图像。
9、在上述方式中,所述第二获取部可以通过使分辨率比所述摄像头高的辅助摄像头拍摄与所述第一图像的所述部分区域对应的范围来获取所述第二图像。
10、在上述方式中,所述第一识别部可以使用第一已学习模型来识别所述第一图像内的所述浮标的位置,所述第二识别部可以使用第二已学习模型来从所述第二图像识别所述浮标的标识内容。
11、在上述方式中,所述第一已学习模型和所述第二已学习模型可以将互不相同的第一已学习参数和第二已学习参数分别编入到共同的推理程序而得到。
12、在上述方式中,所述第一识别部可以进一步识别所述浮标的种类。
13、在上述方式中,所述第二识别部可以在所述浮标的种类是侧面标识的情况下,识别所述浮标的标识内容是左舷标识和右舷标识中的哪一个。
14、在上述方式中,所述第二识别部可以在所述浮标的种类是方位标识的情况下,识别所述浮标的标识内容是北方位标识、东方位标识、南方位标识以及西方位标识中的哪一个。
15、在上述方式中,所述第二识别部可以在所述浮标的种类是侧面标识的情况下,使用侧面标识用的已学习模型来识别所述浮标的标识内容是左舷标识和右舷标识中的哪一个,所述第二识别部可以在所述浮标的种类是方位标识的情况下,使用方位标识用的已学习模型来识别所述浮标的标识内容是北方位标识、东方位标识、南方位标识以及西方位标识中的哪一个。
16、在上述方式中,所述第二获取部可以在所述浮标的种类是孤立障碍物标识、安全水域标识、或特殊标识的情况下,不会获取所述第二图像。
17、在上述方式中,所述第二获取部和所述第二识别部可以在从所述第一图像识别出多个所述浮标的情况下,对多个所述浮标分别进行所述第二图像的获取和所述标识内容的识别。
18、在上述方式中,还可以具有显示控制部,其基于所述浮标的标识内容、所述第一图像内的所述浮标的位置、以及所述摄像头的拍摄方向,在所述第一图像、电子海图、或雷达图像上显示表示所述浮标的标识内容的符号。
19、在上述方式中,还可以具有匹配判定部,其基于所述浮标的标识内容、所述第一图像内的所述浮标的位置、所述摄像头的拍摄方向、以及所述船舶的位置,判定所述浮标的标识内容与记录在电子海图中的航路标识数据所表示的标识内容的匹配性。
20、在上述方式中,还可以具有显示控制部,其将所述匹配性的判定结果显示在所述第一图像、所述电子海图、或雷达图像上。
21、另外,本发明另一方式的自主航行系统可以具有:上述的航路标识识别装置;以及航路计算部,在多个所述浮标的标识内容包含左舷标识、右舷标识以及安全水域标识中的至少两个的情况下,基于所述第一图像内的所述浮标的位置和所述摄像头的拍摄方向,计算所述船舶的航路或者航路宽度。
22、另外,本发明另一方式的自主航行系统可以具有:上述的航路标识识别装置;虚拟标识获取部,获取表示虚拟标识的位置和标识内容的数据;以及航路计算部,基于所述浮标的标识内容、所述虚拟标识的位置、以及所述虚拟标识的标识内容,计算所述船舶的航路或者航路宽度。
23、另外,本发明另一方式的自主航行系统可以具有:上述的航路标识识别装置;位置检测部,检测所述船舶的位置;以及航路计算部,基于所述浮标的标识内容、所述第一图像内的所述浮标的位置、所述摄像头的拍摄方向、以及所述船舶的位置,设定所述船舶应经过的转向点。
24、另外,本发明另一方式的自主航行系统可以具有:上述的航路标识识别装置;方位检测部,检测所述船舶的船首方位;以及航路计算部,基于所述浮标的标识内容、所述摄像头的拍摄方向、以及所述船舶的船首方位,设定所述船舶应航行的方位。
25、在上述方式中,还可以具有自动操舵装置,其基于所述浮标的标识内容进行自主航行控制。
26、另外,本发明另一方式的航路标识识别方法从设置于船舶的摄像头获取包含浮标的第一图像,识别所述第一图像内的所述浮标的位置,获取与所述第一图像中的包含所述浮标的位置的部分区域对应且分辨率比所述第一图像高的第二图像,从所述第二图像识别所述浮标的标识内容。
27、另外,本发明另一方式的程序使计算机执行:从设置于船舶的摄像头获取包含浮标的第一图像;识别所述第一图像内的所述浮标的位置;获取与所述第一图像中的包含所述浮标的位置的部分区域对应且分辨率比所述第一图像高的第二图像;以及从所述第二图像识别所述浮标的标识内容。
28、发明效果
29、根据本发明,能够提高标识内容的识别精度。
技术特征:
1.一种航路标识识别装置,其中,具有:
2.根据权利要求1所述的航路标识识别装置,其中,
3.根据权利要求2所述的航路标识识别装置,其中,
4.根据权利要求1所述的航路标识识别装置,其中,
5.根据权利要求1所述的航路标识识别装置,其中,
6.根据权利要求1至5中任一项所述的航路标识识别装置,其中,
7.根据权利要求6所述的航路标识识别装置,其中,
8.根据权利要求1至7中任一项所述的航路标识识别装置,其中,
9.根据权利要求8所述的航路标识识别装置,其中,
10.根据权利要求8或9所述的航路标识识别装置,其中,
11.根据权利要求8至10中任一项所述的航路标识识别装置,其中,
12.根据权利要求8至11中任一项所述的航路标识识别装置,其中,
13.根据权利要求1至12中任一项所述的航路标识识别装置,其中,
14.根据权利要求1至13中任一项所述的航路标识识别装置,其中,
15.根据权利要求1至14中任一项所述的航路标识识别装置,其中,
16.根据权利要求15所述的航路标识识别装置,其中,
17.一种自主航行系统,其中,具有:
18.一种自主航行系统,其中,具有:
19.一种自主航行系统,其中,具有:
20.一种自主航行系统,其中,具有:
21.根据权利要求17至20中任一项所述的自主航行系统,其中,
22.一种航路标识识别方法,其中,
23.一种程序,其中,用于使计算机执行:
技术总结
【课题】提供能够提高标识内容的识别精度的航路标识识别装置。【解决手段】航路标识识别装置具有:第一获取部,从设置于船舶的摄像头获取包含浮标的第一图像;第一识别部,识别第一图像内的浮标的位置;第二获取部,获取与第一图像中的包含浮标的位置的部分区域对应且分辨率比第一图像高的第二图像;以及第二识别部,从第二图像识别浮标的标识内容。
技术研发人员:原裕一,山田胜雄
受保护的技术使用者:古野电气株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!