测距系统的制作方法
本公开涉及测距系统。
背景技术:
1、以往,提出了用光照射物体并检测来自该物体的反射光从而取得该物体的距离数据的各种设备。对象场景的距离数据例如可以被变换为3维的点群(point cloud)的数据并加以利用。点群数据典型地是由3维坐标表现场景中物体所存在的点的分布的数据。
2、专利文献1公开了一种系统,针对由第1相机生成的第1深度映射中的深度信息,基于由第2相机生成的第2深度映射中的深度信息进行补全。专利文献1的系统针对第1深度映射中的深度信息缺失的空像素的深度值,基于第2深度映射中的对应的像素的深度值进行补全。该系统基于空像素的深度值被补全后的第1深度映射,生成物体的3d模型(例如点群)。
3、在先技术文献
4、专利文献
5、专利文献1:日本特许第6656549号公报
技术实现思路
1、本发明所要解决的课题
2、本公开的一个方式提供在包括多个测距装置的系统中选择性地对未能由其他测距装置得到数据的区域进行测距的新的传感方法。
3、用于解决课题的手段
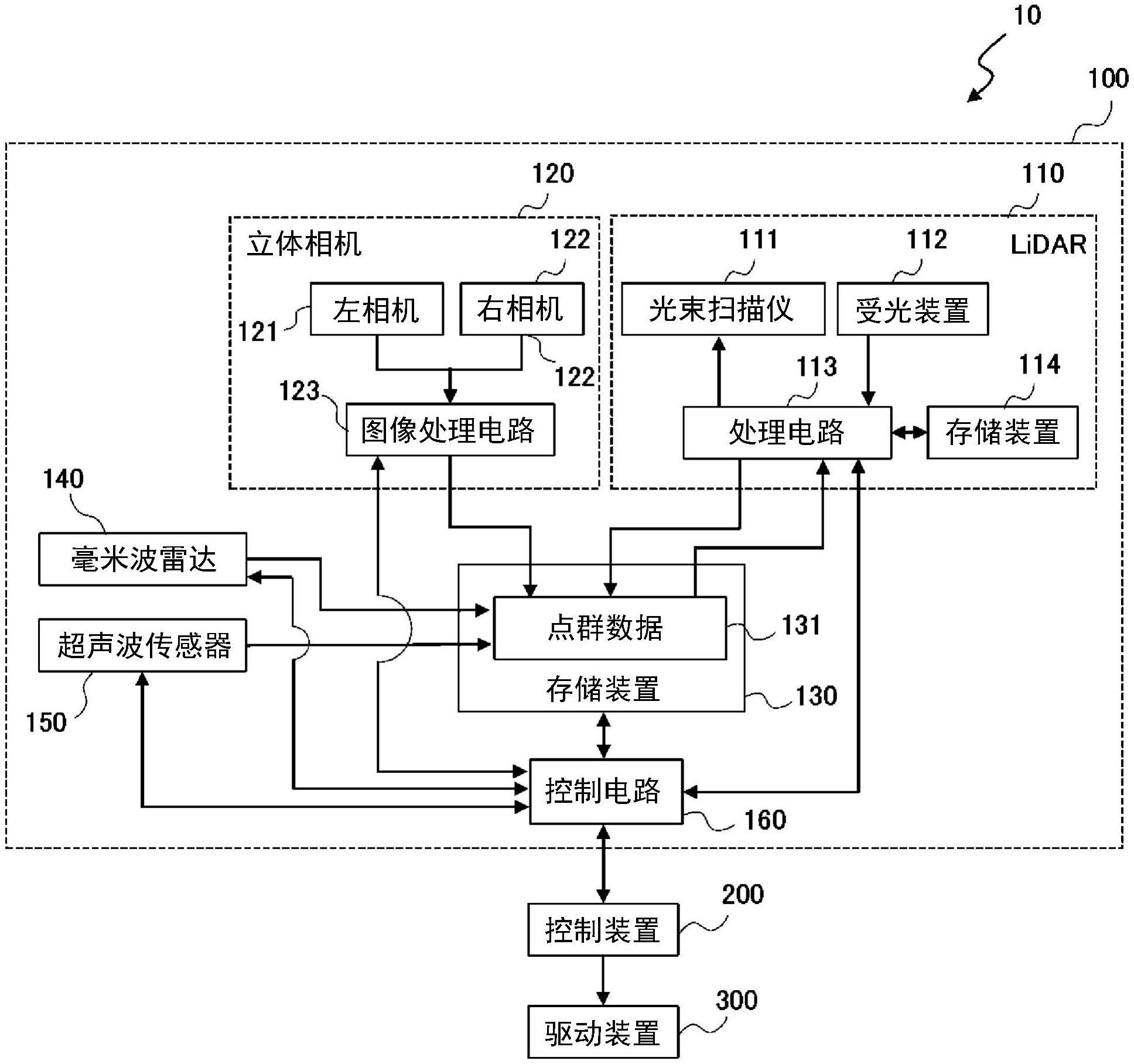
4、本公开的一个方式所涉及的lidar传感器在测距系统中被使用,该测距系统具备:多个测距装置,包括所述lidar传感器及1个以上的其他测距装置;以及存储装置,存储基于由所述多个测距装置各自取得的测距数据的3维的点群数据。所述lidar传感器具备:发光装置,能够使光束的出射方向变化;受光装置,检测由所述光束产生的反射光,并输出表示检测结果的信号;以及处理电路,对所述发光装置及所述受光装置进行控制,基于从所述受光装置输出的所述信号生成所述测距数据。所述处理电路参照所述点群数据,决定所述点群数据的1个以上的空白区域,使所述发光装置朝向所述空白区域出射所述光束从而进行所述空白区域的测距。
5、本公开的概括或者具体的方式也可以通过系统、装置、方法、集成电路、计算机程序或者计算机能够读取的记录盘等记录介质实现,也可以通过系统、装置、方法、集成电路、计算机程序及记录介质的任意组合来实现。计算机可读取的记录介质既可以包括易失性的记录介质,也可以包括cd-rom(紧凑盘-只读存储器(compact disc-read only memory))等非易失性的记录介质。装置也可以由1个以上的装置构成。在装置由2个以上的装置构成的情况下,该2个以上的装置既可以配置在1个设备内,也可以分开配置在分离的2个以上的设备内。在本说明书及权利要求书中,“装置”不仅可以指1个装置,也可以指由多个装置构成的系统。
6、发明效果
7、根据本公开的一个方式,通过选择性地对未能由其他测距装置得到数据的区域进行测距,能够取得更多的距离数据。
8、本公开所包括的各种方式中的附加的益处及优点根据本说明书及附图而明确。该益处以及/或者优点分别可以通过本说明书及附图所公开的各种方式或者各方式中的一部分特征而个别地提供。为了得到该益处以及/或者优点中的1个以上,并不需要被公开的全部特征。
技术特征:
1.一种测距系统,具备:
2.如权利要求1所述的测距系统,
3.如权利要求2所述的测距系统,
4.如权利要求3所述的测距系统,
5.如权利要求3或者4所述的测距系统,
6.如权利要求3至5中任一项所述的测距系统,
7.如权利要求2至6中任一项所述的测距系统,
8.如权利要求2至7中任一项所述的测距系统,
9.如权利要求1至8中任一项所述的测距系统,
10.如权利要求9所述的测距系统,
11.如权利要求1至10中任一项所述的测距系统,
12.如权利要求1至11中任一项所述的测距系统,
13.如权利要求1至12中任一项所述的测距系统,
14.如权利要求13所述的测距系统,
15.如权利要求13或者14所述的测距系统,
16.如权利要求2至8中任一项所述的测距系统,
17.一种移动体,具备如权利要求1至16中任一项所述的测距系统。
18.一种lidar传感器即光感探测及测距传感器,在测距系统中被使用,该测距系统具备:多个测距装置,包括lidar传感器及1个以上的其他测距装置;以及存储装置,存储基于由所述多个测距装置各自取得的测距数据的3维的点群数据,该lidar传感器具备:
19.一种对lidar传感器即光感探测及测距传感器进行控制的方法,该lidar传感器在测距系统中被使用,该测距系统具备:多个测距装置,包括lidar传感器及1个以上的其他测距装置;以及存储装置,存储基于由所述多个测距装置各自取得的测距数据的3维的点群数据,该方法包括:
20.一种计算机程序,在测距系统中被使用,该测距系统具备:多个测距装置,包括lidar传感器即光感探测及测距传感器及1个以上的其他测距装置;以及存储装置,存储基于由所述多个测距装置各自取得的测距数据的3维的点群数据,该计算机程序使计算机执行:
技术总结
测距系统具备:多个测距装置,包括LiDAR传感器及1个以上的其他测距装置;以及存储装置,存储基于由所述多个测距装置各自取得的测距数据的3维的点群数据。所述LiDAR传感器具备:发光装置,能够使光束的出射方向变化;受光装置,检测由所述光束产生的反射光,输出表示检测结果的信号;以及处理电路,对所述发光装置及所述受光装置进行控制,基于从所述受光装置输出的所述信号生成所述测距数据。所述处理电路参照所述点群数据,决定所述点群数据的1个以上的空白区域,使所述发光装置朝向所述空白区域出射所述光束从而进行所述空白区域的测距。
技术研发人员:加藤弓子,松延徹,稻田安寿
受保护的技术使用者:松下知识产权经营株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!