具深度或影像监视系统的架设方法与流程
本发明关于一种架设方法,尤指一种具深度或影像监视系统的架设方法。
背景技术:
1、一般来说,对空间进行监视,需要在空间部署相应的监视设备,例如可使用毫米波雷达或摄像机。如中国专利公告号cn111510665b所公开的一种“毫米波雷达与摄像机联合的监控系统、监控方法及装置”,该案的监控系统包括毫米波雷达,用于采集目标人体的特征信息,该特征信息包括预设时间段内该目标人体的体征信息,并将该目标人体的特征信息发送至摄像机;摄像机,用于接收该毫米波雷达发送的目标人体的特征信息,基于该目标人体的体征信息,从本摄像机在该预设时间段内采集的包含该目标人体的图像帧序列中识别是否存在包含指定姿态的图像,若存在,则从该图像帧序列中确定用于输出的目标图像帧,该目标图像帧为包含该指定姿态的图像。
2、监视设备都具有一定的视角(field of view,fov),视角是指监视设备所能涵盖的监视范围,超过这个角度,物体将不会出现在监视范围内,会产生死角。单一毫米波雷达或摄像机的视角通常不能完全涵盖整个空间,需架设复数个毫米波雷达或摄像机,使复数个毫米波雷达或摄像机的视角相互叠合,而叠合的视角更大,以求能完全涵盖整个空间。
3、然而,在初始架设毫米波雷达或摄像机时,大多是依靠过往经验先行初步的架设,待架设完毕后,再逐步调整(或增设)毫米波雷达或摄像机,使毫米波雷达或摄像机叠合的视角能涵盖整个空间。但在调整(或增设)毫米波雷达或摄像机的过程中,并未有精准的数据作为参考,且无有效的架设方法可降低死角存在。
4、是故,如何将上述的缺失加以摒除,即为本案发明人所欲解决的技术困难点的所在。
技术实现思路
1、有鉴于现有的架设方法的上述问题,因此本发明的目的在于提供一种具深度或影像监视系统的架设方法。
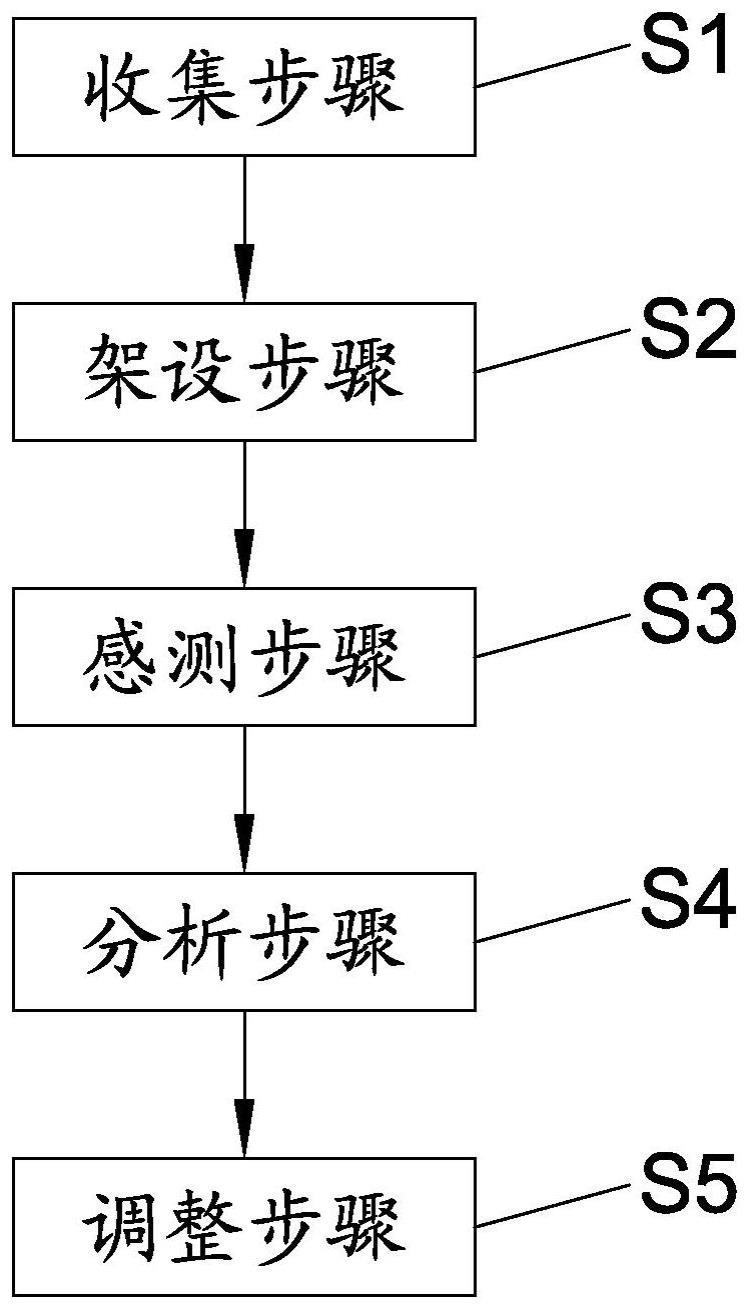
2、为达成以上的目的,本发明提供一种具深度或影像监视系统的架设方法,其包含:一收集步骤、一架设步骤、一感测步骤、一分析步骤及一调整步骤。该收集步骤,收集一空间的空间信息,该空间信息包含该空间的长度、宽度、高度;该架设步骤,在该空间中设有复数个传感器及一基准点,该基准点上设有一反射器或一标定图案,其中该传感器具有一视角;该感测步骤,利用该复数个传感器侦测该反射器或该标定图案,而获得该复数个传感器相对于该基准点的相对位置;该分析步骤,将该空间的空间信息、该复数个传感器的视角、该复数个传感器相对于该基准点的相对位置带入一算法模块中计算,该算法模块将该复数个传感器的视角叠合在该空间中,并分析出该复数个视角叠合后的范围是否涵盖整个该空间;以及该调整步骤,若该复数个视角重叠后的范围未能涵盖整个该空间,通过在该空间中调整或增设该传感器,使该复数个传感器的视角能涵盖整个该空间。
3、其中,该架设步骤在该空间中设置复数个传感器,该复数个传感器为一毫米波雷达或一光学相机。
4、其中,该架设步骤在该空间中设置复数个传感器,该复数个传感器为同时使用一毫米波雷达及一光学相机。
5、其中,该架设步骤在该空间中建立一基准点,该基准点上设有一反射器,该反射器为一角反射器(corner reflector)、一龙伯透镜反射器(luneburg lens reflector)或一球型反射器(ball reflector)。
6、其中,该架设步骤在该空间中建立一基准点,该基准点上设有一标定图案,该标定图案为一棋盘(chessboard)图案、一aruco图案或一charuco图案。
7、其中,该感测步骤中的该复数个传感器分别为毫米波雷达,且配合该反射器一同使用,该毫米波雷达发出的一电磁波遇到该反射器,该反射器将该电磁波反射回到该毫米波雷达,该毫米波雷达据此计算出该毫米波雷达与该反射器之间的相对距离、角度、高度,进而获得该复数个毫米波雷达相对于该基准点的相对位置。
8、其中,该感测步骤中的该复数个传感器分别为一光学相机,且配合该标定图案一同使用,该光学相机以相机标定(camera calibration)法拍摄该标定图案的一影像,该标定图案在该空间中具有一实际位置,该标定图案在该影像中具有一像素位置,由该像素位置与该实际位置的对应关系,推算出该光学相机与该标定图案之间的相对位置,进而获得该复数个光学相机相对于该基准点的相对位置。
9、其中,该架设步骤在该空间中建立一基准点,并在该基准点上设有一转动盘,该转动盘上设有该反射器或该标定图案。
10、以此产生精准的数据,供调整或增设传感器,使复数个传感器的视角能涵盖整个空间,减少死角的存在。
技术特征:
1.一种具深度或影像监视系统的架设方法,其特征在于,包含:
2.如权利要求1所述的具深度或影像监视系统的架设方法,其特征在于,该架设步骤在该空间中设置复数个传感器,该复数个传感器为一毫米波雷达或一光学相机。
3.如权利要求1所述的具深度或影像监视系统的架设方法,其特征在于,该架设步骤在该空间中设置复数个传感器,该复数个传感器为同时使用一毫米波雷达及一光学相机。
4.如权利要求1所述的具深度或影像监视系统的架设方法,其特征在于,该架设步骤在该空间中建立一基准点,该基准点上设有一反射器,该反射器为一角反射器、一龙伯透镜反射器或一球型反射器。
5.如权利要求1所述的具深度或影像监视系统的架设方法,其特征在于,该架设步骤在该空间中建立一基准点,该基准点上设有一标定图案,该标定图案为一棋盘图案、一aruco图案或一charuco图案。
6.如权利要求1所述的具深度或影像监视系统的架设方法,其特征在于,该感测步骤中的该复数个传感器分别为毫米波雷达,且配合该反射器一同使用,任一毫米波雷达发出的一电磁波遇到该反射器,该反射器将该电磁波反射回到该毫米波雷达,该毫米波雷达据此计算出该毫米波雷达与该反射器之间的相对距离、角度、高度,进而获得该复数个毫米波雷达相对于该基准点的相对位置。
7.如权利要求1所述的具深度或影像监视系统的架设方法,其特征在于,该感测步骤中的该复数个传感器分别为一光学相机,且配合该标定图案一同使用,任一光学相机以相机标定法拍摄该标定图案的一影像,该标定图案在该空间中具有一实际位置,该标定图案在该影像中具有一像素位置,由该像素位置与该实际位置的对应关系,推算出该光学相机与该标定图案之间的相对位置,进而获得该复数个光学相机相对于该基准点的相对位置。
8.如权利要求1所述的具深度或影像监视系统的架设方法,其特征在于,该架设步骤在该空间中建立一基准点,并在该基准点上设有一转动盘,该转动盘上设有该反射器或该标定图案。
技术总结
本发明公开一种具深度或影像监视系统的架设方法,其包含:收集步骤,系收集空间的空间信息;架设步骤,在该空间中设有复数个传感器及基准点,基准点上设有反射器或标定图案,其中传感器具有视角;感测步骤,利用复数个传感器侦测反射器或标定图案,而获得复数个传感器相对于基准点的相对位置;分析步骤,将空间的空间信息、复数个传感器的视角、复数个传感器相对于基准点的相对位置带入算法模块中计算,算法模块将复数个传感器的视角叠合在空间中,并分析出复数个视角叠合后的范围是否涵盖整个空间;调整步骤,若复数个视野重叠后的范围未能涵盖整个空间,通过在空间中调整或增设传感器,使复数个传感器的视野能涵盖整个空间。
技术研发人员:林文雄,鞠志远,童凯彬
受保护的技术使用者:佐臻股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!