对象检测方法、系统和存储介质与流程
本发明涉及对象检测。
背景技术:
1、光检测和测距(lidar)根据由发射器发射、被对象反射并由检测器检测到的光来确定信息。类似地,无线电检测和测距(radar)根据发射器发射并被对象反射的无线电波来确定对象信息。该信息包括诸如到对象的距离、对象的速度等的与对象相关联的数据。检测器是接收对象反射的光的光电检测器。检测器可以是固态光电检测器、光电倍增器或其任意组合。
技术实现思路
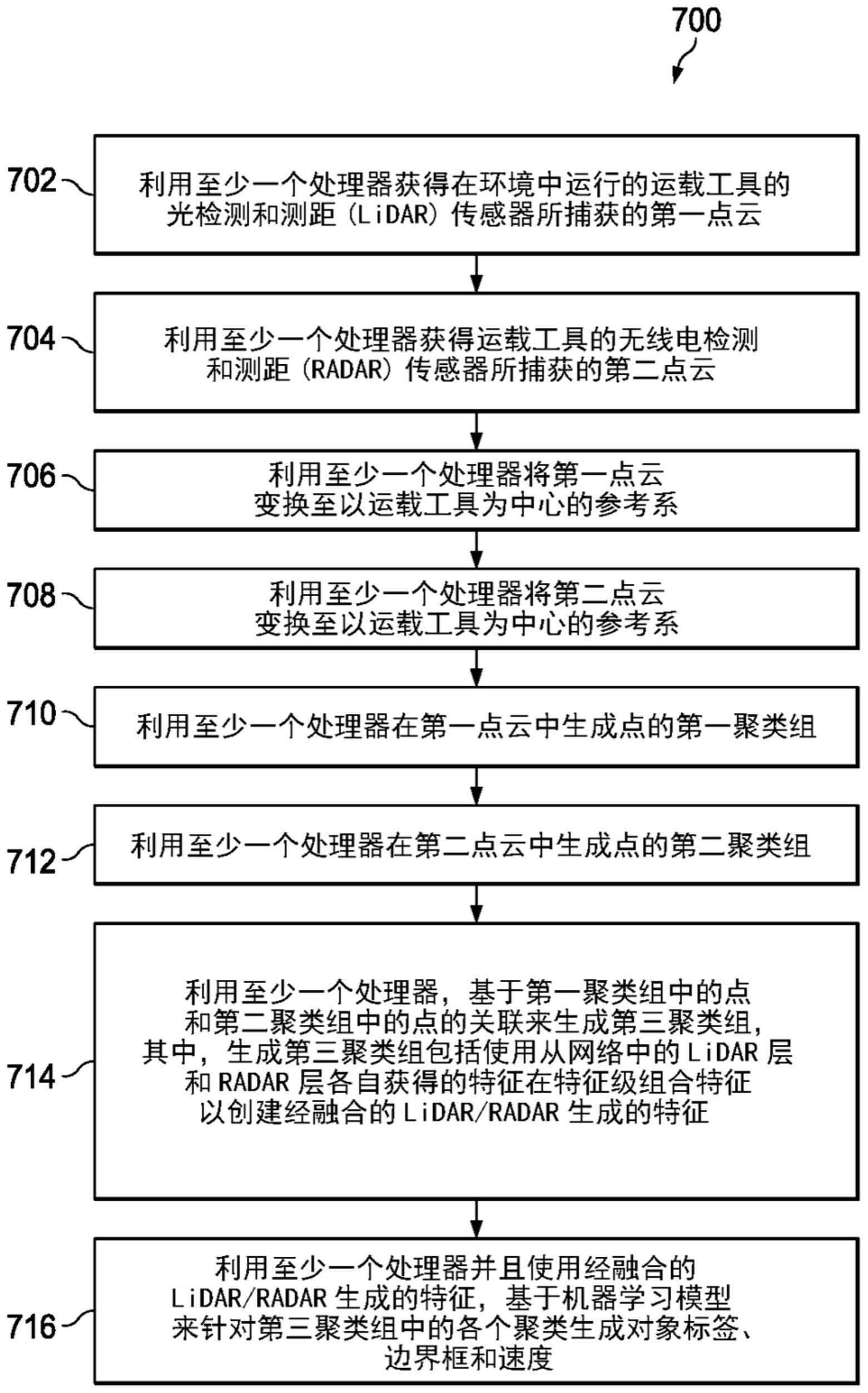
1、一种用于对象检测的方法,包括:利用至少一个处理器获得在环境中运行的运载工具的光检测和测距传感器即lidar传感器所捕获的第一点云;利用所述至少一个处理器获得所述运载工具的无线电检测和测距传感器即radar传感器所捕获的第二点云;利用所述至少一个处理器将所述第一点云转换至以运载工具为中心的参考系;利用所述至少一个处理器将所述第二点云转换至所述以运载工具为中心的参考系;利用所述至少一个处理器在所述第一点云中生成点的第一聚类组;利用所述至少一个处理器在所述第二点云中生成点的第二聚类组;利用所述至少一个处理器,基于所述第一聚类组中的点与所述第二聚类组中的点的关联来生成第三聚类组,其中生成所述第三聚类组包括使用从网络中的lidar分支和radar分支中的各个分支获得的特征、在特征级组合特征以创建经融合的lidar/radar生成的特征;以及利用所述至少一个处理器并且使用所述经融合的lidar/radar生成的特征,基于机器学习模型来针对所述第三聚类组中的各个聚类生成对象标签、边界框和速度。
2、一种用于对象检测的系统,包括:至少一个处理器;以及存储器,其存储有指令,所述指令在由所述至少一个处理器执行时,使得所述至少一个处理器进行上述方法。
3、一种非暂时性计算机可读存储介质,其上存储有指令,所述指令在由一个或多于一个处理器执行时,使得所述一个或多于一个处理器进行上述方法。
技术特征:
1.一种用于对象检测的方法,包括:
2.根据权利要求1所述的方法,还包括:
3.根据权利要求1所述的方法,其中,所述第一点云和所述第二点云分别从所述lidar传感器和所述radar传感器对环境的多个扫描中累积。
4.根据权利要求1所述的方法,其中,所述第一聚类组和所述第二聚类组基于启发式特征而相关联,所述启发式特征至少包括聚类的质心之间的距离、聚类的航向和速度。
5.根据权利要求1所述的方法,还包括创建融合深度学习网络来组合补充的激光雷达点和雷达点,以学习用于对象检测的交叉模态特征。
6.根据权利要求1所述的方法,其中,在所述第一点云中生成点的第一聚类组包括:
7.根据权利要求1所述的方法,其中,所述第一聚类组的大小用于确定点的第二聚类组的锚框大小。
8.根据权利要求1所述的方法,还包括:
9.根据权利要求1所述的方法,其中,所述第一聚类组中的各个点与点云参考系中的位置坐标和强度值以及多个扫描之间的相对时间信息相关联,并且其中所述第二聚类组中的各个点与距离、方位、距离变化率和幅度以及多个扫描之间的相对时间信息相关联。
10.一种用于对象检测的系统,包括:
11.一种非暂时性计算机可读存储介质,其上存储有指令,所述指令在由一个或多于一个处理器执行时,使得所述一个或多于一个处理器进行权利要求1至9中任一项所述的方法。
技术总结
本发明涉及对象检测方法、系统和存储介质。提供了使用雷达与激光雷达融合的用于对象检测的方法,该方法可以包括生成组合分别针对雷达和激光雷达的点云聚类的聚类,使用深度学习模型根据该聚类确定融合特征。还提供了系统和计算机程序产品。
技术研发人员:孟小利,周禄兵,K·R·谢蒂
受保护的技术使用者:动态AD有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!