一种封闭或半封闭区域下的导航方法、装置及电子设备与流程
本发明涉及导航领域,具体涉及一种封闭或半封闭区域下的导航方法、装置及电子设备。
背景技术:
1、现阶段对机器人或无人车在做路径规划时,通常情况下为了实时监控无人车或移动机器人所处的实际环境,准确的判断地理或道路信息,需要提前对这些路径进行前置处理,通过录像对这些路径周边的实际环境记录,并留存到数据处理中心。这种提前进行路径采图的方式,给无人车应用带来了巨大的不方便。首先路径采图的方式可能会存在视觉死角,影响路径规划的准确性,对车辆行驶带来安全隐患。
技术实现思路
1、有鉴于此,本发明实施例提供了一种封闭或半封闭区域下的导航方法,以解决现有技术中路径采图的方式路径规划不准确,影响车辆安全的问题。
2、为达到上述目的,本发明提供如下技术方案:
3、本发明实施例提供了一种封闭或半封闭区域下的导航方法,包括:
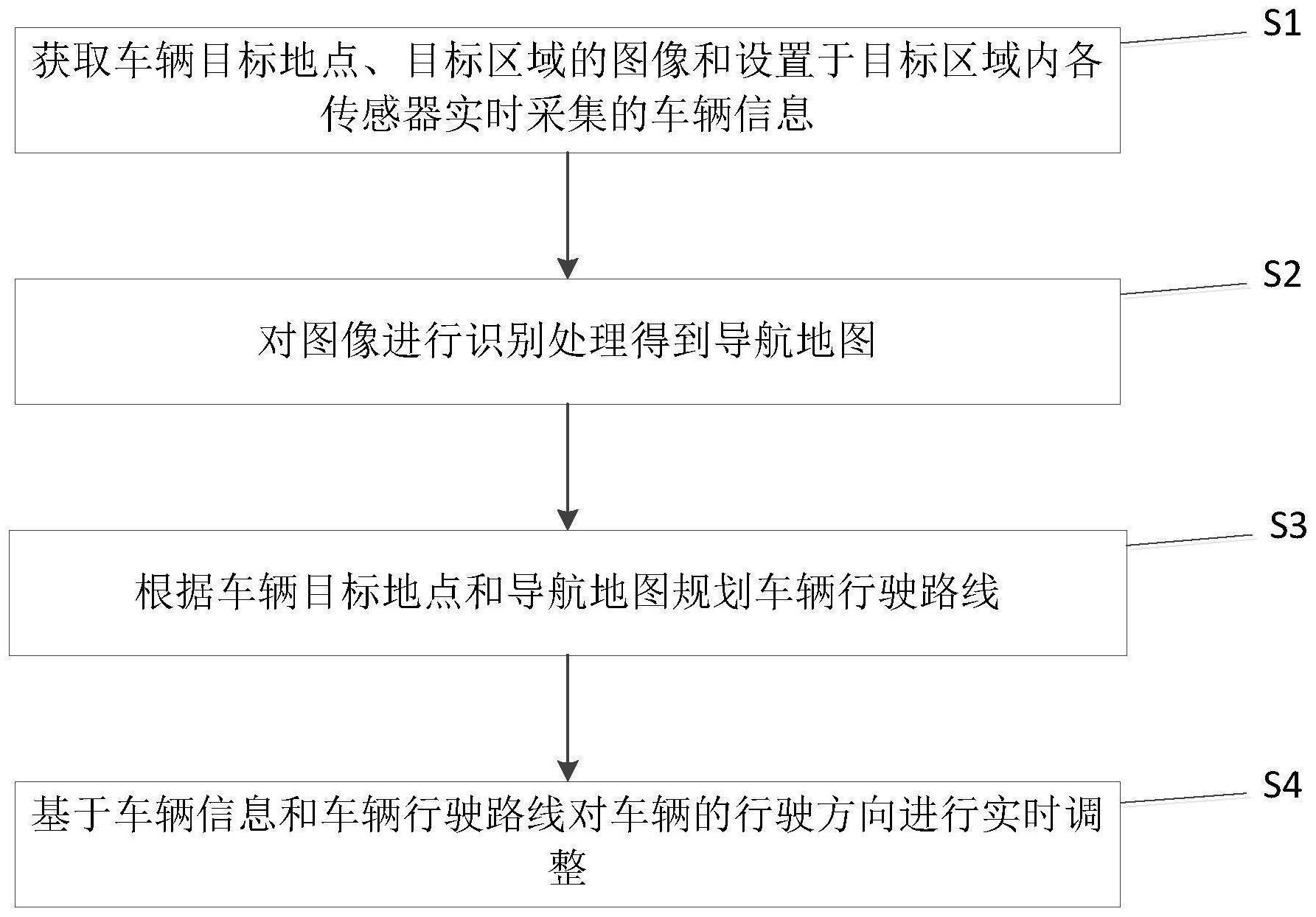
4、获取车辆目标地点、目标区域的图像和设置于所述目标区域内各传感器实时采集的车辆信息;
5、对所述图像进行识别处理得到导航地图;
6、根据所述车辆目标地点和所述导航地图规划车辆行驶路线;
7、基于所述车辆信息和所述车辆行驶路线对车辆的行驶方向进行实时调整。
8、可选的,所述对所述图像进行识别处理得到导航地图,包括:
9、对所述图像进行识别得到地图信息;
10、对所述地图信息进行环境标识,得到导航地图。
11、可选的,所述对所述地图信息进行环境标识,得到导航地图,包括:
12、将所述地图信息进行环境分析,得到道路信息和障碍物信息;
13、基于所述障碍物信息标识禁行区域;
14、基于所述道路信息标识道路区域;
15、基于所述禁行区域和所述道路区域得到导航地图。
16、可选的,所述根据所述车辆目标地点和所述导航地图规划车辆行驶路线,包括:
17、提取所述导航地图的边界,确定车辆的可移动范围;
18、基于所述车辆目标地点和所述车辆的可移动范围在所述导航地图上进行最短路径规划,得到车辆行驶路线。
19、可选的,所述提取所述导航地图的边界,确定车辆的可移动范围,包括:
20、对所述导航地图进行格栅化处理,确定车辆的道路边界和禁行区域边界;
21、将所述道路边界和所述禁行区域边界所形成的区域确定为车辆的可移动范围。
22、可选的,所述封闭或半封闭区域下的导航方法,还包括:
23、获取车辆的尺寸信息;
24、基于所述车辆信息确定车辆实时位置;
25、若所述尺寸信息在所述车辆行驶路线中超出所述车辆的可移动范围,则基于所述车辆实时位置对所述车辆行驶路线进行重新规划。
26、可选的,所述基于所述车辆信息和所述车辆行驶路线对车辆进行实时调整,包括:
27、根据所述车辆信息确定车辆实时位置;
28、基于所述车辆实时位置判断车辆是否偏离所述车辆行驶路线;
29、若车辆偏离了所述车辆行驶路线,对所述车辆的行驶方向进行实时调整。
30、本发明实施例还提供了一种封闭或半封闭区域下的导航装置,包括:
31、获取模块,用于获取车辆目标地点、目标区域的图像和设置于所述目标区域内各传感器实时采集的车辆信息;
32、处理模块,用于对所述图像进行识别处理得到导航地图;
33、规划模块,用于根据所述车辆目标地点和所述导航地图规划车辆行驶路线;
34、调整模块,用于基于所述车辆信息和所述车辆行驶路线对车辆的行驶方向进行实时调整。
35、本发明实施例还提供了一种电子设备,包括:
36、存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行本发明实施例提供的封闭或半封闭区域下的导航方法。
37、本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行本发明实施例提供的封闭或半封闭区域下的导航方法。
38、本发明技术方案,具有如下优点:
39、本发明提供了一种封闭或半封闭区域下的导航方法,通过获取车辆目标地点、目标区域的图像和设置于目标区域内各传感器实时采集的车辆信息;对图像进行识别处理得到导航地图;根据车辆目标地点和导航地图规划车辆行驶路线;基于车辆信息和车辆行驶路线对车辆的行驶方向进行实时调整。本发明通过对封闭或半封闭区域下,采取对全区域图像处理的方式,对车辆的导航进行合理规划,避免了因路径采图所存在的视觉死角对车辆行驶带来安全隐患的问题,有效提高了车辆的导航效率。
技术特征:
1.一种封闭或半封闭区域下的导航方法,其特征在于,包括:
2.根据权利要求1所述的封闭或半封闭区域下的导航方法,其特征在于,所述对所述图像进行识别处理得到导航地图,包括:
3.根据权利要求2所述的封闭或半封闭区域下的导航方法,其特征在于,所述对所述地图信息进行环境标识,得到导航地图,包括:
4.根据权利要求1所述的封闭或半封闭区域下的导航方法,其特征在于,所述根据所述车辆目标地点和所述导航地图规划车辆行驶路线,包括:
5.根据权利要求4所述的封闭或半封闭区域下的导航方法,其特征在于,所述提取所述导航地图的边界,确定车辆的可移动范围,包括:
6.根据权利要求4所述的封闭或半封闭区域下的导航方法,其特征在于,还包括:
7.根据权利要求1所述的封闭或半封闭区域下的导航方法,其特征在于,所述基于所述车辆信息和所述车辆行驶路线对车辆进行实时调整,包括:
8.一种封闭或半封闭区域下的导航装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使所述计算机执行权利要求1-7中任一项所述的封闭或半封闭区域下的导航方法。
技术总结
本发明公开了一种封闭或半封闭区域下的导航方法,该方法包括:获取车辆目标地点、目标区域的图像和设置于目标区域内各传感器实时采集的车辆信息;对图像进行识别处理得到导航地图;根据车辆目标地点和导航地图规划车辆行驶路线;基于车辆信息和车辆行驶路线对车辆的行驶方向进行实时调整。本发明通过对封闭或半封闭区域下,采取对全区域图像处理的方式,对车辆的导航进行合理规划,避免了因路径采图所存在的视觉死角对车辆行驶带来安全隐患的问题,有效提高了车辆的导航效率。
技术研发人员:丛文斌,丛升日,余立新,刘房勇
受保护的技术使用者:中科大路(青岛)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!