基于激光位移传感器的箱梁桥挠曲变形应力检测方法与流程
1.本发明涉及一种箱梁桥挠曲变形应力检测方法,尤其涉及一种基于激光位移传感器的箱梁桥挠曲变形应力检测方法。
背景技术:
2.桥梁是交通基础设施中的重要组成部分,是人们出行必不可少的交通载体,其结构安全不仅关系到国家的社会、政治、经济、国防等各项事业的健康有序发展,而且直接影响到人民群众的生命财产安全。在桥梁的箱梁结构中,箱梁因具有抗扭刚度大,构造简单,可塑性强等特点,在桥梁施工中被广泛采用。桥梁运营过程中,主梁因车辆的反复碾压和材料的年久氧化等因素,导致承载能力的下降,故需定期对主梁结构进行健康监测。
3.桥梁主梁的受力状态是桥梁结构健康状态的综合反映,是判定桥梁刚度、结构承载力和结构整体性能重要的技术参数。主梁作为荷载直接作用的载体将在荷载作用下产生挠曲变形,其受力性能是否满足要求将决定直接决定行车安全,所以需要检测主梁在动静荷载作用下的应变、应力、振动频率以及是否有微裂缝的开展,及时的发现桥梁的安全隐患,防止安全事故的发生。
4.主梁的受力状态主要体现在发生挠曲变形后全截面的工作应力状态,是判断桥梁安全状态的重要指标之一。主梁局部工作应力超过容许应力将会导致开裂,随着荷载的反复作用以及化学腐蚀裂缝将不断开展,最终对整体结构的安全产生威胁,因此在桥检中及时发现主梁局部应力过大的截面位置至关重要。目前常用的应力测试方法有机械法、磁测法、衍射法和超声法。这些传统的应力测量方法,如机械法、磁测法、衍射法等,其优势在于理论体系完备,检测方法成熟,可以精确测量构件表面的主应力大小与方向,给出应力分布图,但检测周期长,对构件表面光洁程度要求高,且大多采用接触式测量方法,操作过程复杂。超声波法虽然操作简便,但只能测试一定距离内的平均应力,无法对单点做定量检测。
5.因此,为了解决上述技术问题,亟需提出一种新的技术手段。
技术实现要素:
6.有鉴于此,本发明的目的是提供一种基于激光位移传感器的箱梁桥挠曲变形应力检测方法,在检测过程中对箱梁结构无损伤,并且不受箱梁表面光洁度的影响,能够快速且准确的确定箱梁的截面弯曲应力,利于及时发现箱梁受力最不利的位置,为桥梁的运维提供准确的数据支持,操作过程简单,缩短了检测周期,提高了检测效率。
7.本发明提供的一种基于激光位移传感器的箱梁桥挠曲变形应力检测方法:
8.s1.在箱梁桥的梁端设置激光位移传感器;
9.s2.在箱梁底部确定观测点,并在观测点设置标靶,且标靶的反射面与激光位移传感器的发射方向垂直;
10.s3.以无荷载时箱梁的梁端中点为原点建立坐标系,并记录各观测点坐标和
11.s4.对箱梁施加荷载,激光位移传感器对各观测点的位移进行监测,并记录各观测点发生位移后的坐标和
12.其中:上标u—初始状态上幅测点,d—初始状态下幅测点,u’—变形后的上幅测点,d’—变形后的下幅测点,i—测点编号,i=1,2,3;
13.s5.提取在荷载条件下观测点的坐标和并将所提取的坐标输入至采用origin软件拟合箱梁的挠曲函数z(x),并基于挠曲函数z(x)确定箱梁的截面弯曲应力。
14.进一步,步骤s2中,在箱梁的1/4和1/2跨径处设置观测点,且三个观测点间距相等且三个观测点所在的直线与箱梁的长度方向的中心线具有夹角。
15.进一步,通过如下方法确定箱梁的截面弯曲应力:
16.其中,为箱梁的截面弯曲应力,h为箱梁的截面竖向高度,e为材料弹性模量。
17.本发明的有益效果:通过本发明,在检测过程中对箱梁结构无损伤,并且不受箱梁表面光洁度的影响,能够快速且准确的确定箱梁的截面变形应力,利于及时发现箱梁受力最不利的位置,为桥梁的运维提供准确的数据支持,操作过程简单,缩短了检测周期,提高了检测效率。
附图说明
18.下面结合附图和实施例对本发明作进一步描述:
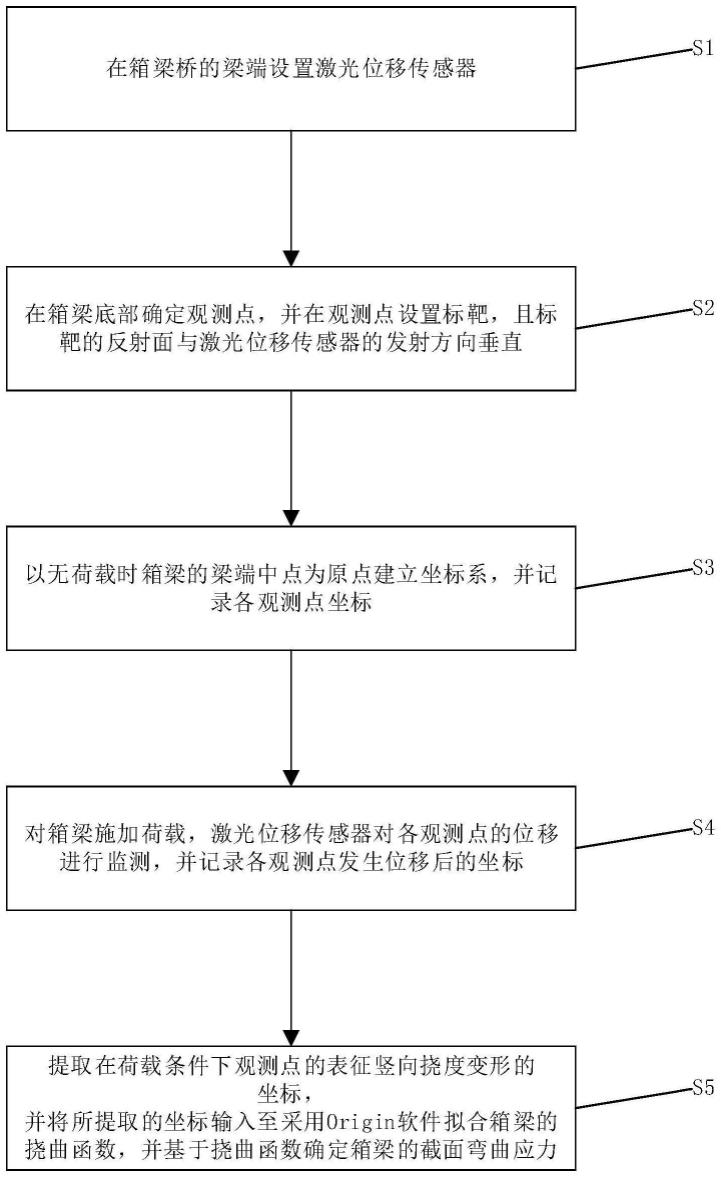
19.图1为本发明的流程图。
20.图2为本发明激光位移传感器和观测点布置结构示意图。
21.图3位挠曲变形函数曲线示意图。
具体实施方式
22.以下结合说明书附图对本发明做出进一步详细说明:
23.本发明提供的一种基于激光位移传感器的箱梁桥挠曲变形应力检测方法,包括以下步骤:
24.s1.在箱梁桥的梁端设置激光位移传感器;
25.s2.在箱梁底部确定观测点,并在观测点设置标靶,且标靶的反射面与激光位移传感器的发射方向垂直;
26.s3.以无荷载时箱梁的梁端中点为原点建立坐标系,并记录各观测点坐标和
27.s4.对箱梁施加荷载,激光位移传感器对各观测点的位移进行监测,并记录各观测点发生位移后的坐标和
28.其中:上标u—初始状态上幅测点,d—初始状态下幅测点,u’—变形后的上幅测点,d’—变形后的下幅测点,i—测点编号,i=1,2,3;
29.s5.提取在荷载条件下观测点的坐标和并将所提取的坐标输入至采用origin软件拟合箱梁的挠曲函数z(x),并基于挠曲函数z(x)确定箱梁的截面弯曲应力,其中,荷载包括正载和偏载,在荷载下,箱梁的抗扭刚度大,因此,其水平位移和横向位移都较小,因此,其变形挠曲主要发生在竖向,因此,提取上述两个坐标;
30.通过上述方法,在检测过程中对箱梁结构无损伤,并且不受箱梁表面光洁度的影响,能够快速且准确的确定箱梁的截面变形应力,利于及时发现箱梁受力最不利的位置,为桥梁的运维提供准确的数据支持,操作过程简单,缩短了检测周期,提高了检测效率。
31.本实施例中,步骤s2中,在箱梁的1/4和1/2跨径处设置观测点,且三个观测点间距相等且三个观测点所在的直线与箱梁的长度方向的中心线具有夹角,具体如图2所示,在上述方式,能够保证观测点与位移传感器之间无遮挡,从而确保数据采集的完整性,更为重要的是:能够确保最终origin软件对挠曲函数z(x)的曲线拟合的准确性,从而确保最终结果的准确性。
32.进一步,通过如下方法确定箱梁的截面弯曲应力:
33.其中,为箱梁的截面弯曲应力,h为箱梁的截面竖向高度,e为材料弹性模量;其中,其推导如下:
34.荷载作用下截面的弯矩表达式为:
35.m(x)=-eiz”(x)(1);
36.弯曲应力计算公式为:
37.因此,将式(1)代入式(2)中得到截面弯曲应力公式。
38.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
技术特征:
1.一种基于激光位移传感器的箱梁桥挠曲变形应力检测方法,其特征在于:包括以下步骤:s1.在箱梁桥的梁端设置激光位移传感器;s2.在箱梁底部确定观测点,并在观测点设置标靶,且标靶的反射面与激光位移传感器的发射方向垂直;s3.以无荷载时箱梁的梁端中点为原点建立坐标系,并记录各观测点坐标和s4.对箱梁施加荷载,激光位移传感器对各观测点的位移进行监测,并记录各观测点发生位移后的坐标和其中:上标u—初始状态上幅测点,d—初始状态下幅测点,u’—变形后的上幅测点,d’—变形后的下幅测点,i—测点编号,i=1,2,3;s5.提取在荷载条件下观测点的坐标和并将所提取的坐标输入至采用origin软件拟合箱梁的挠曲函数z(x),并基于挠曲函数z(x)确定箱梁的截面弯曲应力。2.根据权利要求1所述基于激光位移传感器的箱梁桥挠曲变形应力检测方法,其特征在于:步骤s2中,在箱梁的1/4和1/2跨径处设置观测点,且三个观测点间距相等且三个观测点所在的直线与箱梁的长度方向的中心线具有夹角。3.根据权利要求1所述基于激光位移传感器的箱梁桥挠曲变形应力检测方法,其特征在于:通过如下方法确定箱梁的截面弯曲应力:其中,为箱梁的截面弯曲应力,h为箱梁的截面竖向高度,e为材料弹性模量。
技术总结
本发明提供的一种基于激光位移传感器的箱梁桥挠曲变形应力检测方法,包括:在箱梁桥的梁端设置激光位移传感器;在箱梁底部确定观测点,并在观测点设置标靶,且标靶的反射面与激光位移传感器的发射方向垂直;以无荷载时箱梁的梁端中点为原点建立坐标系,并记录各观测点坐标和对箱梁施加荷载,激光位移传感器对各观测点的位移进行监测,并记录各观测点发生位移后的坐标和提取在荷载条件下观测点的坐标和并将所提取的坐标输入至采用Origin软件拟合箱梁的挠曲函数z(x),并基于挠曲函数z(x)确定箱梁的截面弯曲应力;在检测过程中对箱梁结构无损伤,并且不受箱梁表面光洁度的影响,能够快速且准确的确定箱梁的截面弯曲变形应力。面弯曲变形应力。
技术研发人员:王邵锐 李英斌 周建庭 敬世红 熊国斌 辛德武 江代敏
受保护的技术使用者:重庆渝湘复线高速公路有限公司 四川公路桥梁建设集团有限公司 中国葛洲坝集团第二工程有限公司
技术研发日:2022.04.20
技术公布日:2022/8/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1