FMCW雷达扫描装置、测量方法及FMCW雷达与流程
本申请涉及雷达领域,尤其涉及一种fmcw雷达扫描装置、测量方法及fmcw雷达。
背景技术:
1、目前激光雷达应用于许多场景中,如自动驾驶、3d建模等。其中,机械式调频连续波(frequency modulated continuous wave,fmcw)激光雷达是比较常见的一种激光雷达。
2、但是,通过机械式fmcw激光雷达扫描时,由于现有的反射棱镜在进行反射的过程中会出现较大的多普勒频移,导致测量信号的频率发生偏移或展宽,测距能力减小,测量精度变差。
技术实现思路
1、本申请的主要目的在于提供一种雷达扫描方法、装置、雷达及可读存储介质,旨在解决现有的反射棱镜在进行反射的过程中会出现较大的多普勒频移,导致测量信号的频率发生偏移或展宽,测距能力减小,测量精度变差的问题。
2、第一方面,本申请提供一种fmcw雷达扫描装置,fmcw雷达扫描装置包括:fmcw激光雷达、折射棱镜模块以及棱镜调整模块。fmcw激光雷达发射预先调制好的测量光,测量光射入折射棱镜模块的一端,并从折射棱镜模块的另一端射出。棱镜调整模块设于折射棱镜模块上,用于调整棱镜模块中棱镜的相对空间位置和相对控件角度。
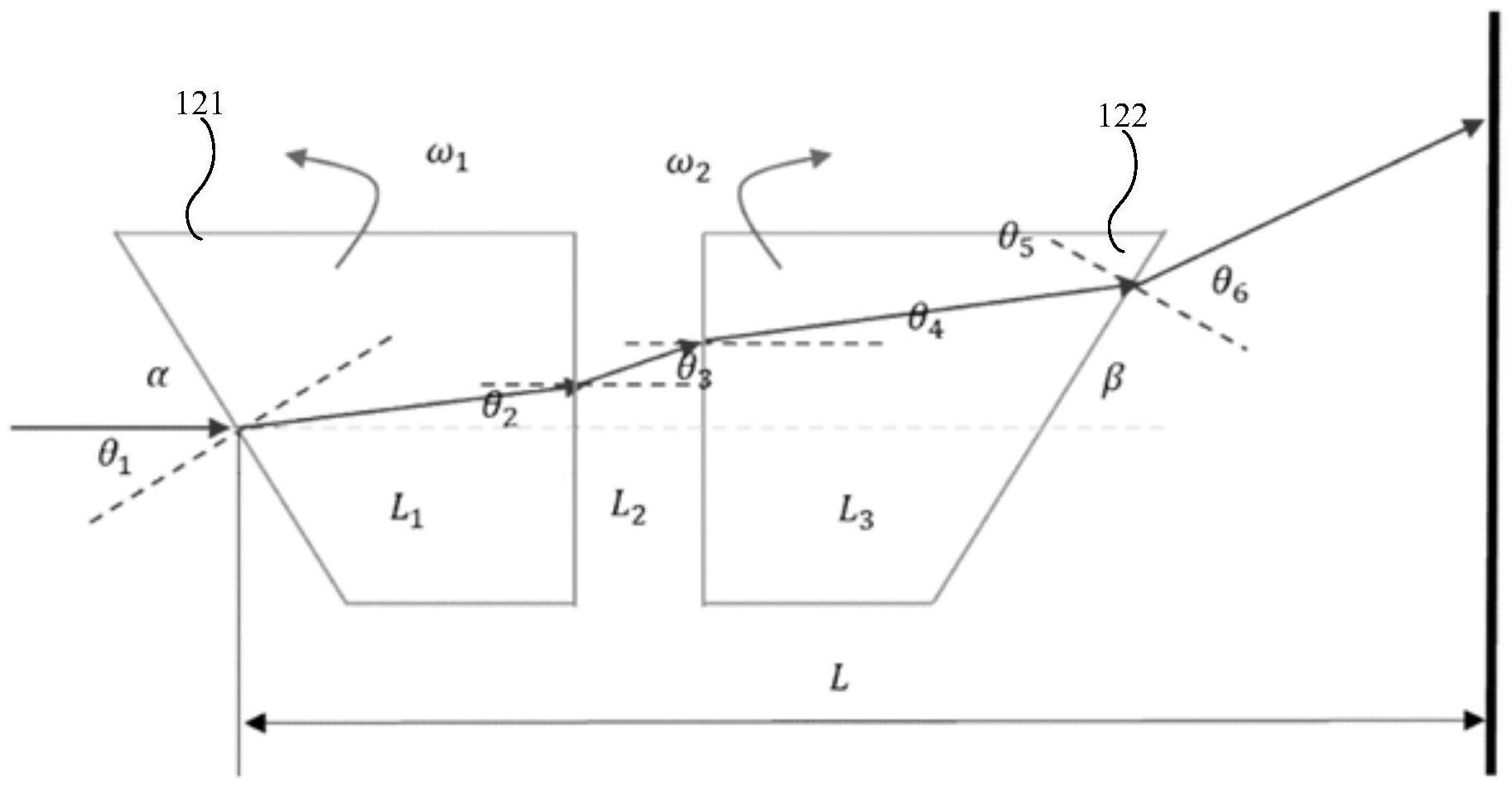
3、一些实施方式中,折射棱镜模块至少包括第一楔形棱镜和第二楔形棱镜,第一楔形棱镜和第二楔形棱镜分别包括一个斜面和一个底面。测量光从第一楔形棱镜的斜面射入,从第一楔形棱镜的底面射出后,射入第二楔形棱镜的底面,并从第二楔形棱镜的斜面射出。
4、一些实施方式中,fmcw雷达扫描装置还包括:角度计算模块。角度计算模块与棱镜调整模块电连接,用于获取第一楔形棱镜和第二楔形棱镜的相对空间位置和相对控件角度。根据第一楔形棱镜和第二楔形棱镜的相对空间位置和相对控件角度获取测量光从第二楔形棱镜的斜面射出时的位置和角度。
5、第二方面,本申请还提供一种fmcw雷达测量方法,应用于第一方面提供的fmcw雷达扫描装置以及扫描接收装置,方法包括:通过fmcw雷达扫描装置射出测量光和参考光,测量光在预设时长内扫描出预设的光斑图案,参考光与测量光为同一束光经分光得到的。通过扫描接收装置接收经待测物体反射测量光的光信号,光信号为测量光在待测物体上扫描预设的光斑图案时反射的测量光。根据光信号和参考光干涉后的频率,计算得到测量结果。
6、一些实施方式中,通过棱镜调整模块对第一楔形棱镜和第二楔形棱镜的相对空间位置和相对控件角度进行调整,以使得测量光经过棱镜调整模块后在预设时长内扫描出预设的光斑图案。
7、一些实施方式中,通过棱镜调整模块改变调整速率,使得测量光经过棱镜调整模块后在预设时长内扫描出预设的光斑图案的密度调整为目标密度,调整速度为对第一楔形棱镜和第二楔形棱镜的相对空间位置和相对控件角度进行调整的速率。
8、第三方面,本申请还提供一种fmcw雷达,fmcw雷达包括第一反提供的fmcw雷达扫描装置、扫描接收装置、控制器以及计算机可读储存介质,计算机可读储存介质中存储有计算机程序,计算机程序被控制器执行时实现第二方面提供的fmcw雷达测量方法。
9、一些实施方式中,扫描接收装置包括光学组件和光电传感器。光学系统用于接收经待测物体反射的预设的光斑图案。光学系统用于接收经待测物体反射的光信号,光信号为测量光在待测物体上扫描预设的光斑图案时反射的测量光。光电传感器用于将光学系统接收到的光信号转换为电信号。
10、第四方面,本申请还提供一种交通工具,交通工具包括第三方面提供的fmcw雷达。
11、第五方面,本申请还提供一种立体扫描设备,立体扫描设备包括第三方面提供的fmcw雷达。
12、第六方面,本申请还提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,其中计算机程序被处理器执行时,实现如上述的第二方面提供的方法。
13、本申请提供的fmcw雷达扫描装置测量方法及fmcw雷达,通过折射的方式实现光斑的扫描,由于在折射的过程中产生多普勒效应较弱,因此减小了测量过程中的频谱展宽和频谱偏移等问题。
技术特征:
1.一种调频连续波fmcw雷达扫描装置,其特征在于,所述fmcw雷达扫描装置包括:fmcw激光雷达、折射棱镜模块以及棱镜调整模块;
2.根据权利要求1所述的fmcw雷达扫描装置,其特征在于,所述折射棱镜模块至少包括第一楔形棱镜和第二楔形棱镜,所述第一楔形棱镜和所述第二楔形棱镜分别包括一个斜面和一个底面;
3.根据权利要求2所述的fmcw雷达扫描装置,其特征在于,所述fmcw雷达扫描装置还包括:角度计算模块;
4.一种fmcw雷达测量方法,其特征在于,所述方法应用于权利要求1-3任一项所述的fmcw雷达扫描装置以及扫描接收装置,所述方法包括:
5.根据权利要求4所述的方法,其特征在于,通过棱镜调整模块对第一楔形棱镜和第二楔形棱镜的相对空间位置和相对控件角度进行调整,以使得所述测量光经过所述棱镜调整模块后在预设时长内扫描出预设的光斑图案。
6.根据权利要求5所述的方法,其特征在于,通过所述棱镜调整模块改变调整速率,使得所述测量光经过所述棱镜调整模块后在预设时长内扫描出预设的光斑图案的密度调整为目标密度,所述调整速度为对所述第一楔形棱镜和所述第二楔形棱镜的相对空间位置和相对控件角度进行调整的速率。
7.一种fmcw雷达,其特征在于,所述fmcw雷达包括权利要求1-3任一项所述的fmcw雷达扫描装置、扫描接收装置、控制器以及计算机可读储存介质,所述计算机可读储存介质中存储有计算机程序,所述计算机程序被所述控制器执行时实现如权利要求4-7任一项所述的fmcw雷达测量方法。
8.根据权利要求7所述的fmcw雷达,其特征在于,所述扫描接收装置包括光学组件和光电传感器;
9.一种交通工具,其特征在于,所述交通工具包括权利要求7或8提供的所述fmcw雷达。
10.一种立体扫描设备,其特征在于,所述立体扫描设备包括权利要求7或8提供的所述fmcw雷达。
技术总结
本申请涉及雷达领域,尤其涉及一种FMCW雷达扫描装置、测量方法及FMCW雷达。FMCW雷达扫描装置包括:FMCW激光雷达、折射棱镜模块以及棱镜调整模块。FMCW激光雷达发射预先调制好的测量光,测量光射入折射棱镜模块的一端,并从折射棱镜模块的另一端射出。棱镜调整模块设于折射棱镜模块上,用于调整棱镜模块中棱镜的相对空间位置和相对控件角度。本申请提供的FMCW雷达扫描装置通过折射的方式实现光斑的扫描,由于在折射的过程中产生多普勒效应较弱,因此减小了测量过程中的频谱展宽和频谱偏移等问题。
技术研发人员:汝洪武,徐洋,邓永强
受保护的技术使用者:北京万集科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!