自移动设备的地图生成方法、设备及机器人与流程
本申请人工智能,尤其涉及自移动设备的地图生成方法、设备及机器人。
背景技术:
1、随着人工智能技术的不断发展,机器人也越来越多的出现在人们的日常生活中。为了使得机器人更加聪明、更加人性化,通常会为机器人添加各种传感器。
2、工作时,机器人利用各种传感器对其所在的环境进行实时采集,并对所采集到的数据进行大量感知计算才能使机器人较为清楚的了解到其所在的环境状况。这也就意味着,需要在机器人上安装更多先进传感器的同时,还需要配置有能够提供大算力需求的计算芯片。若传感器采集的数据量过大,或者计算芯片算力不足,则会直接影响对机器人周围环境状况了解的及时性和准确性。尤其是高速运行机器人在繁杂环境中,计算芯片算力不足将直接关系到机器人的工作效率等问题。
3、因此,需要一种提高机器人对环境信息处理能力的方案。
技术实现思路
1、本申请的多个方面提供自移动设备的地图生成方法、设备及机器人,用以提高对环境信息的处理能力。
2、第一方面,本申请实施例提供一种动态地图生成方法,所述方法包括:
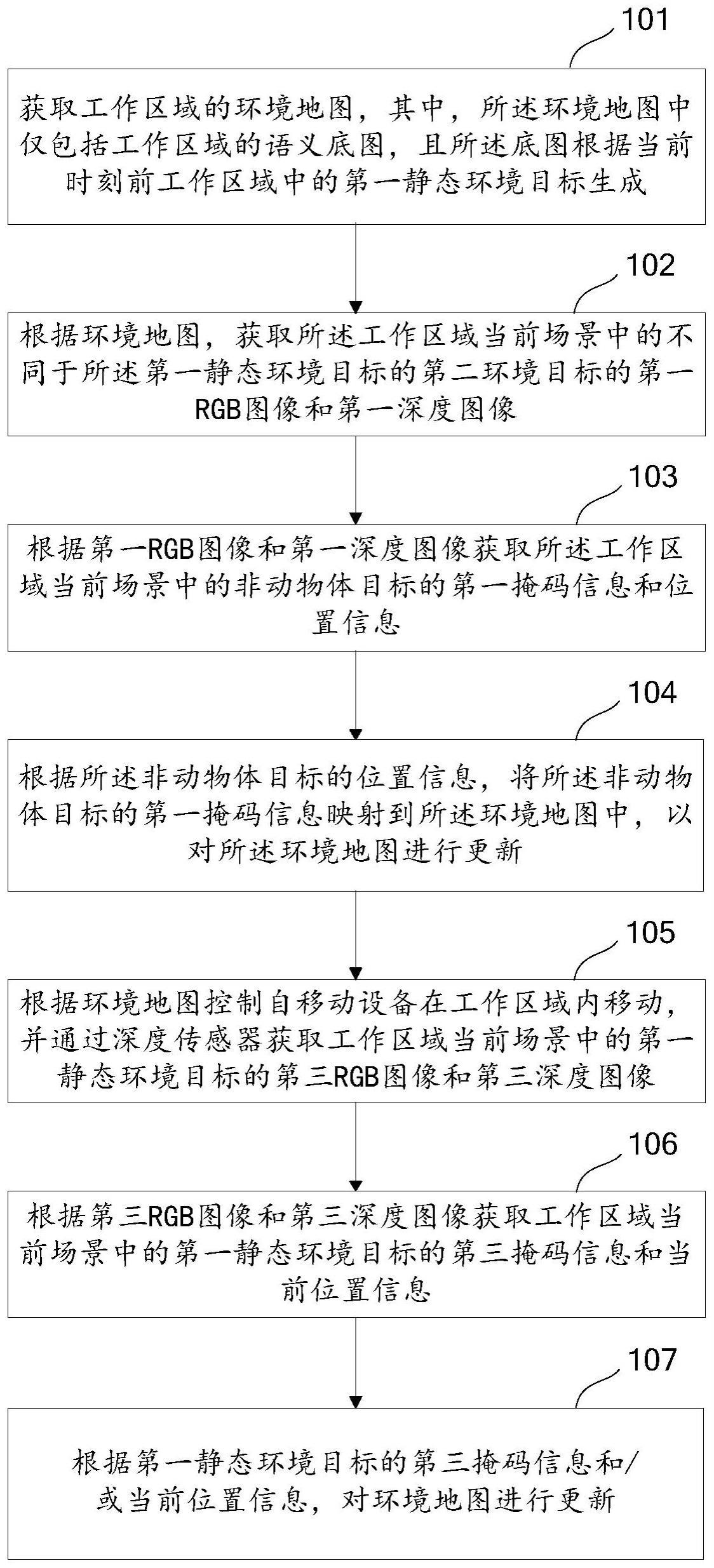
3、获取工作区域的环境地图,其中,所述环境地图中仅包括所述工作区域的语义底图,且所述底图根据当前时刻前所述工作区域中的第一静态环境目标所生成;
4、根据环境地图获取所述工作区域当前场景下的第二环境目标的第一rgb图像和第一深度图像,其中,所述第二环境目标与第一静态环境目标不同;
5、根据第一rgb图像和第一深度图像获取所述工作区域当前场景下的非动物体目标的第一掩码信息和位置信息;
6、根据所述非动物体目标的位置信息,将所述非动物体目标的第一掩码信息映射到所述环境地图中,以对所述环境地图进行更新。
7、第二方面,本申请实施例提供一种机器人,所述机器人包括:
8、机械本体,所述机械本体上设有深度传感器、一个或多个处理器,以及一个或多个存储有计算机指令的存储器;
9、所述深度传感器,用于采集工作区域的图像数据;
10、所述存储器,用于存储语义底图;
11、所述处理器,用于执行第一方面所述的方法。
12、第三方面,本申请实施例提供一种电子设备,所述电子设备包括:存储器及处理器;其中,
13、所述存储器,用于存储程序;
14、所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以用于执行第一方面所述的方法。
15、在本申请的一些实施例中,由于机器人在工作过程中,仅实时依靠传感器进行定位以及识别需要耗费大量算力,也就意味着需要为机器人配置支持大算力芯片。若算力不足,则会影响传感器工作效率和准确性。因此,可以先针对工作区域创建语义底图,在该语义底图当中存储有当前时刻前工作区域中第一静态环境目标的语义信息。然后根据环境地图控制机器人移动,且机器人在移动过程中会实时获取当前所在工作区域的环境图像,提取工作区域当前场景中的第二环境目标的第一rgb图像和第一深度图像,根据第一rgb图像和第一深度图像获取所述工作区域中的非动物体目标的第一掩码信息和位置信息。进而,根据所述非动物体目标的位置信息,将所述非动物体目标的第一掩码信息映射到所述环境地图中,以对所述环境地图进行更新。本方案中,建立了包含当前时刻前工作区域中的第一静态环境目标的底图,或者根据当前时刻工作区域中的第一静态环境目标和/或第二环境目标对底图更新后的地图。而该第一静态环境目标可以包括当前时刻前工作区域中的不同于第二环境目标的所有静态物体。具体来说,例如机器人为割草机,工作区域为待割草区域时,第一静态环境目标主要包括:1)草地;2)树、花等保护性植物;3)栅栏。根据上述语义底图中的信息,可以得到1)草地的种类和边界;2)树、花等保护性植物的位置和边界;3)栅栏等边界位置。如此能够帮助机器人实现如下功能:1)工作路径自动规划;2)自主导航;3)自主避障;4)对不同的草地类型选择不同的工作模式等功能。而该第二环境目标可以包括工作区域当前场景中的不同于第一静态环境目标的其他环境物体。例如花瓶、垃圾等障碍物。如此通过该语义底图或更新后的底图使得机器人能拥有精确的位置信息和工作区域的环境信息的数据,可以帮助机器人感知周围复杂的环境,例如机器人可通过该地图感知草地范围,草地类型,障碍物位置等,可以辅助机器人更好的进行工作路径规划,避障等任务,从而减轻机器人后续计算的压力,更准确的完成机器所需要完成的各项功能。进一步地,也即不需要机器人在建图之后再通过传感器进行大量数据信息的采集和计算,如此能够有效降低计算量,确保机器人对环境信息处理的工作效率。
技术特征:
1.一种自移动设备的地图生成方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述自移动设备具有深度传感器;步骤根据环境地图,获取所述工作区域当前场景中的不同于所述第一静态环境目标的第二环境目标的第一rgb图像和第一深度图像,具体包括:
3.根据权利要求1所述的方法,其特征在于,步骤根据第一rgb图像和第一深度图像获取所述工作区域当前场景中的非动物体目标的第一掩码信息和位置信息,具体包括:
4.根据权利要求3所述的方法,其特征在于,步骤当所述第二环境目标为非动物体目标时,根据所述第一rgb图像和第一深度图像获取所述非动物体目标的位置信息,具体包括:
5.根据权利要求3所述的方法,其特征在于,步骤对所述第一rgb图像和/或所述第一深度图像进行图像分割,以获取所述第二环境目标的第一掩码信息,具体包括:
6.根据权利要求1至5中任一项所述的方法,其特征在于,还包括:当所述第二环境目标不为所述非动物体目标时,不对所述环境地图进行更新。
7.根据权利要求1至3中任一项所述的方法,其特征在于,还包括:在所述语义底图中标记表示所述非动物体目标的物体属性的提示信息。
8.根据权利要求1至3中任一项所述的方法,其特征在于,所述环境地图的生成方式包括:
9.根据权利要求1至3中任一项所述的方法,其特征在于,所述自移动设备具有深度传感器,所述方法还包括:
10.根据权利要求9所述的方法,其特征在于,步骤根据所述第一静态环境目标的所述第三掩码信息和/或当前位置信息,对所述环境地图进行更新,具体包括:
11.一种机器人,其特征在于,包括:机械本体,所述机械本体上设有深度传感器、一个或多个处理器,以及一个或多个存储有计算机指令的存储器;
12.一种电子设备,其特征在于,包括存储器及处理器;其中,
技术总结
本申请实施例提供自移动设备的地图生成方法、设备及机器人。该方法包括,获取工作区域的环境地图,其中,环境地图中仅包括语义底图,且底图仅根据当前时刻前在场景中的静态环境目标生成;获取工作区域中的第二环境目标的第一RGB图像和第一深度图像;根据第一RGB图像和第一深度图像获取工作区域中的非动物体目标的第一掩码信息和位置信息;根据非动物体目标的位置信息,将非动物体目标的第一掩码信息映射到环境地图中,以对环境地图进行更新。本方案中,不需要传感器进行大量数据信息的采集和计算,仅需要根据匹配结果进行相应的语义底图的更新,能够有效降低进行环境图像识别的计算量,确保机器人对环境信息处理的工作效率。
技术研发人员:谢厚森,梁振振,杨晓冬,田海鸿,鲍亮
受保护的技术使用者:氪见(南京)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!