一种加速激光点云数据实时解算的方法、设备及存储介质与流程
本申请涉及,尤其涉及一种加速激光点云数据实时解算的方法、设备及存储介质。
背景技术:
1、点云数据实时解算处理算法的主要实现原理是将激光雷达传感器设备获取点云数据和rtk惯导模块提供的高精度位置、姿态数据,通过算法实时解算得到点云数据的坐标位置,从而得到高精度点云坐标。
2、现有的传统slam算法,需要提取点云数据中的特征值、特征向量和回环检测,同时对于用户采集时的操作有很高的要求,并且在采集作业完成后需要消耗大量的cpu和内存资源来进行计算得到解算后的点云坐标。这就要求该算法运行需要使用高性能cpu平台和花费更多解算时间来得到解算结果,无法满足实时解算并显示结果的要求。
3、与传统的slam算法相比,高精度实时点云解算的方法,只需要计算当前时刻的点云数据,这样需要计算的数据量更小,同时算法的复杂性也更小,可以更快速的得到解算结果。尽管高精度实时点云解算算法已经很大程度上简化了解算复杂性和数据量,但相较于手持式android设备的arm cpu架构的计算能力,它自身的运算速度还是无法满足android设备实时显示解算结果的要求。因此,如何实现在手持式android设备上快速的实时解算激光点云数据成为亟待解决的技术问题。
技术实现思路
1、本申请实施例提供了一种加速激光点云数据实时解算的方法、设备及存储介质,用以解决如下技术问题:如何实现在手持式android设备上快速的实时解算激光点云数据。
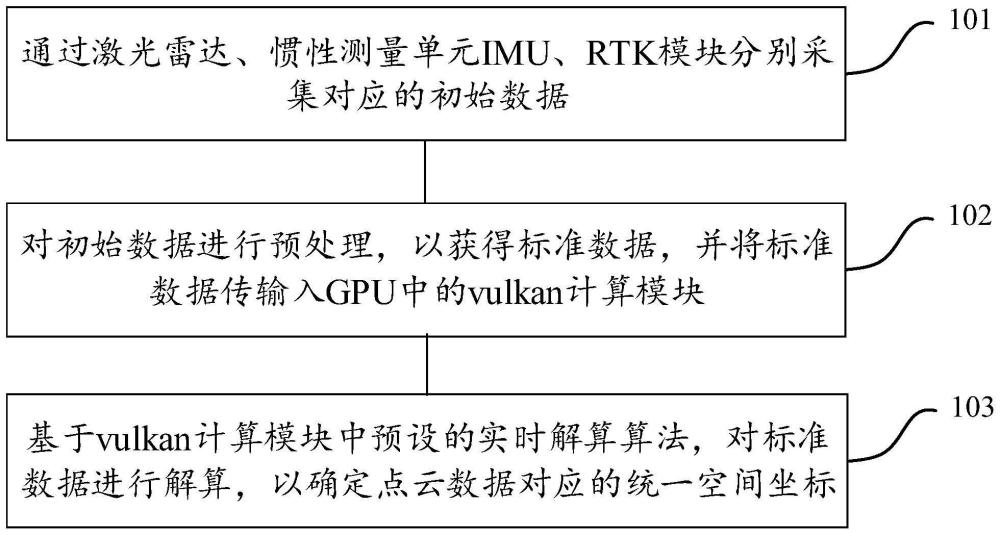
2、第一方面,本申请实施例提供了一种加速激光点云数据实时解算的方法,其特征在于,方法包括:通过激光雷达、惯性测量单元imu、rtk模块分别采集对应的初始数据;其中,初始数据包括点云数据、姿态数据、定位数据;对初始数据进行预处理,以获得标准数据,并将标准数据传输入gpu中的vulkan计算模块;其中,标准数据包括:标准点云数据、标准姿态数据、标准定位数据;基于vulkan计算模块中预设的实时解算算法,对标准数据进行解算,以确定点云数据对应的统一空间坐标。
3、在本申请的一种实现方式中,点云数据包括:点云时间戳信息、点云空间坐标数据、点云反射率数据;姿态数据包括:imu时间戳信息、重力加速度数据、线性加速度数据;定位数据包括:rtk时间戳信息、经纬度数据、高程数据。
4、在本申请的一种实现方式中,对初始数据进行预处理,以获得标准数据,具体包括:基于预设的初始时间戳,通过预设的时间戳压缩算法,分别对点云时间戳信息、imu时间戳信息、rtk时间戳信息进行处理,以获得float格式的标准点云时间戳数据、标准imu时间戳数据、标准rtk时间戳数据;通过预设的格式转换算法,将uint8格式的点云反射率数据转换为float格式的标准点云反射率数据;通过mahony算法,将重力加速度数据与线性加速度数据转换成对应的四元数,并将重力加速度数据对应的四元数定义为float格式的标准重力加速度数据,将线性加速度数据对应的四元数定义为float格式的标准线性加速度数据;将点云空间坐标数据、经纬度数据、高程数据分别定义成float格式的标准点云空间坐标数据、标准经纬度数据、标准高程数据。
5、在本申请的一种实现方式中,基于vulkan计算模块中预设的实时解算算法,对标准数据进行解算,具体包括:基于标准点云时间戳数据、标准imu时间戳数据、标准rtk时间戳数据,确定待解算时刻的标准点云数据对应的近似标准姿态数据与近似标准定位数据;通过矩阵转换规则对近似标准姿态数据进行转换,以确定对应的旋转矩阵,并通过莫卡托坐标转换规则,对近似标准定位数据进行转换,以确定对应的莫卡托投影坐标;基于旋转矩阵与莫卡托投影坐标,确定空间转换矩阵,并基于预设的统一空间坐标转化公式,对空间转换矩阵进行计算,以确定点云数据对应的统一空间坐标。
6、在本申请的一种实现方式中,基于标准点云时间戳数据、标准imu时间戳数据、标准rtk时间戳数据,确定待解算时刻的标准点云数据对应的近似标准姿态数据与近似标准定位数据,具体包括:遍历标准姿态数据与标准定位数据,以确定与待解算时刻最近的两个标准姿态数据与两个标准定位数据;基于两个标准姿态数据与两个标准定位数据,通过线性插值法,确定待解算时刻对应的近似标准姿态数据与近似标准定位数据。
7、在本申请的一种实现方式中,统一空间坐标转化公式表示如下:
8、
9、其中,r11,r12,…r33为3*3旋转矩阵数据,tx,ty,tz为莫卡托投影坐标,x,y,z为标准点云空间坐标数据,x0,y0,z0为统一空间坐标,为空间转换矩阵。
10、在本申请的一种实现方式中,在对初始数据进行预处理,以获得标准数据之前,方法还包括:将激光雷达与惯性测量单元imu分别获取的点云数据与姿态数据传输到c++处理线程中;通过android的jni技术,读取存储于java层中的定位数据,并将定位数据传输到c++处理线程中。
11、在本申请的一种实现方式中,在确定点云数据对应的统一空间坐标之后,方法还包括:基于统一空间坐标与标准点云反射率数据,通过opengl渲染技术对三维场景进行渲染并展示;以及将标准点云数据存储到las格式文件中进行保存。
12、第二方面,本申请实施例还提供了一种加速激光点云数据实时解算的设备,其特征在于,设备包括:处理器;及存储器,其上存储有可执行代码,当可执行代码被执行时,使得处理器执行如权利要求1-8任一项的一种加速激光点云数据实时解算的方法。
13、第三方面,本申请实施例还提供了一种加速激光点云数据实时解算的的非易失性计算机存储介质,存储有计算机可执行指令,其特征在于,计算机可执行指令设置为:通过激光雷达、惯性测量单元imu、rtk模块分别采集对应的初始数据;其中,初始数据包括点云数据、姿态数据、定位数据;对初始数据进行预处理,以获得标准数据,并将标准数据传输入gpu中的vulkan计算模块;其中,标准数据包括:标准点云数据、标准姿态数据、标准定位数据;基于vulkan计算模块中预设的实时解算算法,对标准数据进行解算,以确定点云数据对应的统一空间坐标。
14、本申请实施例提供的一种加速激光点云数据实时解算的方法、设备及存储介质,通过使用android平台自带的vulkan计算模块,充分利用gpu能够并行计算的优点,把实时解算的算法移植到gpu上运行,能够更快速和更高效的得到解算结果,大大提高了点云解算的效率。
技术特征:
1.一种加速激光点云数据实时解算的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种加速激光点云数据实时解算的方法,其特征在于,
3.根据权利要求2所述的一种加速激光点云数据实时解算的方法,其特征在于,对所述初始数据进行预处理,以获得标准数据,具体包括:
4.根据权利要求3所述的一种加速激光点云数据实时解算的方法,其特征在于,基于所述vulkan计算模块中预设的实时解算算法,对所述标准数据进行解算,具体包括:
5.根据权利要求4所述的一种加速激光点云数据实时解算的方法,其特征在于,基于所述标准点云时间戳数据、所述标准imu时间戳数据、所述标准rtk时间戳数据,确定待解算时刻的标准点云数据对应的近似标准姿态数据与近似标准定位数据,具体包括:
6.根据权利要求4所述的一种加速激光点云数据实时解算的方法,其特征在于,统一空间坐标转化公式表示如下:
7.根据权利要求1所述的一种加速激光点云数据实时解算的方法,其特征在于,在对所述初始数据进行预处理,以获得标准数据之前,所述方法还包括:
8.根据权利要求3所述的一种加速激光点云数据实时解算的方法,其特征在于,在确定所述点云数据对应的统一空间坐标之后,所述方法还包括:
9.一种加速激光点云数据实时解算的设备,其特征在于,所述设备包括:
10.一种加速激光点云数据实时解算的的非易失性计算机存储介质,存储有计算机可执行指令,其特征在于,所述计算机可执行指令设置为:
技术总结
本申请公开了一种加速激光点云数据实时解算的方法、设备及存储介质,用以解决如下技术问题:如何实现在手持式android设备上快速的实时解算激光点云数据。方法包括:通过激光雷达、惯性测量单元IMU、RTK模块分别采集对应的初始数据;其中,初始数据包括点云数据、姿态数据、定位数据;对初始数据进行预处理,以获得标准数据,并将标准数据传输入GPU中的vulkan计算模块;其中,标准数据包括:标准点云数据、标准姿态数据、标准定位数据;基于vulkan计算模块中预设的实时解算算法,对标准数据进行解算,以确定点云数据对应的统一空间坐标。本申请通过上述方法实现了在手持式android设备上快速的实时解算激光点云数据。
技术研发人员:单业江,蔡富东,刘涛,许宝进,邹龙跃,王智利,孔志强
受保护的技术使用者:山东信通电子股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!