闭环控制的机载设备电弧检测平台及方法与流程
本发明涉及机载设备电弧检测平台,特别地是,闭环控制的机载设备电弧检测平台及方法。
背景技术:
1、目前,机载设备对于电弧检测能力的要求逐步提升。在科研过程中,需对机载设备进行电弧检测,确定其电弧检测能力。现有的机载设备电弧检测是通过两个导体触点人工手动拉弧。环境湿度、导体触点间距、导体触点尖端烧蚀等原因导致拉弧过程存在不可控的问题,并且拉弧现象无法持续,对检测工作带来一定的阻碍。
技术实现思路
1、本发明目的是解决现有技术中机载设备的电弧检测是通过人工手动拉弧实现的问题,而提供一种新型的闭环控制的机载设备电弧检测平台及方法。
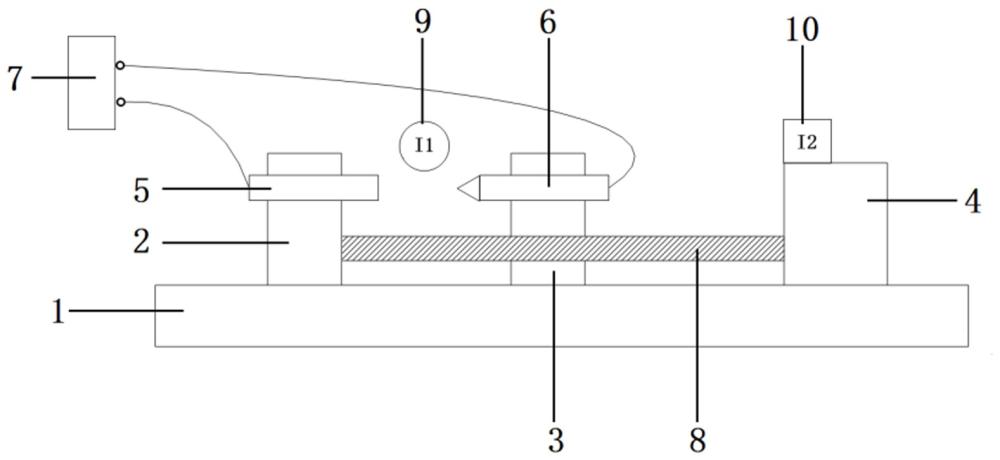
2、为了实现这一目的,本发明的技术方案如下:闭环控制的机载设备电弧检测平台,包括:滑轨固定块、滑轨活动块、步进电机、直线滑轨、固定导体触点、活动导体触点、滚珠丝杠、光敏传感器、电流传感器,所述滑轨活动块位于所述滑轨固定块与所述步进电机间,所述滑轨固定块被固定,所述滑轨活动块与所述直线导轨构成滑动副,所述固定导体触点被固定于所述滑轨固定块,所述活动导体触点被固定于所述滑轨活动块,所述活动导体触点与所述固定导体触点具有共同的水平轴线且两者间有水平间距,所述滚珠丝杠具有直线螺杆及活动螺母,所述滚珠丝杠的所述直线螺杆、所述直线滑轨、所述水平轴线三者具有共同的长度延伸方向,所述滚珠丝杠的所述活动螺母与所述滑轨活动块相固定连接,所述步进电机用于带动所述滚珠丝杠动作,使得所述滑轨活动块能够向所述滑轨固定块滑动以减小所述水平间距,所述光敏传感器用于检测所述固定导体触点与所述活动导体触点间是否出现拉弧现象,所述电流传感器用于检测所述步进电机的实时工作电流。
3、作为闭环控制的机载设备电弧检测平台的优选方案,进一步包括:供电回路,所述固定导体触点通过导线与所述供电回路的其中一端相电连接,所述活动导体触点通过导线与所述供电回路的相对另一端相电连接。
4、作为闭环控制的机载设备电弧检测平台的优选方案,所述固定导体触点与所述活动导体触点中一者为碳棒,另一者为铜棒。
5、本发明还提供闭环控制的机载设备电弧检测平台的方法,提供所述的的闭环控制的机载设备电弧检测平台,包括以下步骤并且依次执行,
6、步骤s1,所述步进电机工作,所述步进电机通过所述滚珠丝杠带动所述滑轨活动块向所述滑轨固定块滑动指定步长,以此减小所述固定导体触点与所述活动导体触点的所述水平间距,再进入步骤s1;以及,
7、步骤s2,判断当前所述固定导体触点与所述活动导体触点间是否出现拉弧现象:若是,则所述步进电机停止工作,直至所述拉弧现象结束返回步骤s1;若否,则进一步判断当前所述固定导体触点与所述活动导体触点是否相接触:若是,则所述步进电机停止工作;若否,则返回步骤s1。
8、作为闭环控制的机载设备电弧检测平台的方法的优选方案,步骤s2中,判断当前所述固定导体触点与所述活动导体触点间是否出现拉弧现象是通过所述光敏传感器实现的。
9、作为闭环控制的机载设备电弧检测平台的方法的优选方案,步骤s2中,判断当前所述固定导体触点与所述活动导体触点是否相接触是通过所述电流传感器实现的:若所述电流传感器检测到的实时工作电流到达堵转电流,则表示所述固定导体触点与所述活动导体触点相接触;若所述电流传感器检测到的实时工作电流未到达堵转电流,则表示所述固定导体触点与所述活动导体触点非接触。
10、作为闭环控制的机载设备电弧检测平台的方法的优选方案,步骤s2中,返回步骤s1的次数设定有上限和/或报警提醒。
11、与现有技术相比,本发明的有益效果至少在于:1.利用滑轨固定块、滑轨活动块、步进电机、直线滑轨,实现自动拉弧;2.利用光敏传感器、电流传感器对步进电机进行闭环控制,实现持续拉弧,具有控制精度高的特点。
技术特征:
1.闭环控制的机载设备电弧检测平台,其特征在于,包括:滑轨固定块、滑轨活动块、步进电机、直线滑轨、固定导体触点、活动导体触点、滚珠丝杠、光敏传感器、电流传感器,所述滑轨活动块位于所述滑轨固定块与所述步进电机间,所述滑轨固定块被固定,所述滑轨活动块与所述直线导轨构成滑动副,所述固定导体触点被固定于所述滑轨固定块,所述活动导体触点被固定于所述滑轨活动块,所述活动导体触点与所述固定导体触点具有共同的水平轴线且两者间有水平间距,所述滚珠丝杠具有直线螺杆及活动螺母,所述滚珠丝杠的所述直线螺杆、所述直线滑轨、所述水平轴线三者具有共同的长度延伸方向,所述滚珠丝杠的所述活动螺母与所述滑轨活动块相固定连接,所述步进电机用于带动所述滚珠丝杠动作,使得所述滑轨活动块能够向所述滑轨固定块滑动以减小所述水平间距,所述光敏传感器用于检测所述固定导体触点与所述活动导体触点间是否出现拉弧现象,所述电流传感器用于检测所述步进电机的实时工作电流。
2.根据权利要求1所述的闭环控制的机载设备电弧检测平台,其特征在于,进一步包括:供电回路,所述固定导体触点通过导线与所述供电回路的其中一端相电连接,所述活动导体触点通过导线与所述供电回路的相对另一端相电连接。
3.根据权利要求1所述的闭环控制的机载设备电弧检测平台,其特征在于,所述固定导体触点与所述活动导体触点中一者为碳棒,另一者为铜棒。
4.闭环控制的机载设备电弧检测平台的方法,提供权利要求1至3中任意一项所述的的闭环控制的机载设备电弧检测平台,其特征在于,包括以下步骤并且依次执行,
5.根据权利要求4所述的闭环控制的机载设备电弧检测平台的方法,其特征在于,步骤s2中,判断当前所述固定导体触点与所述活动导体触点间是否出现拉弧现象是通过所述光敏传感器实现的。
6.根据权利要求4所述的闭环控制的机载设备电弧检测平台的方法,其特征在于,步骤s2中,判断当前所述固定导体触点与所述活动导体触点是否相接触是通过所述电流传感器实现的:若所述电流传感器检测到的实时工作电流到达堵转电流,则表示所述固定导体触点与所述活动导体触点相接触;若所述电流传感器检测到的实时工作电流未到达堵转电流,则表示所述固定导体触点与所述活动导体触点非接触。
7.根据权利要求4所述的闭环控制的机载设备电弧检测平台的方法,其特征在于,步骤s2中,返回步骤s1的次数设定有上限和/或报警提醒。
技术总结
本发明公开闭环控制的机载设备电弧检测平台及方法。检测平台包括:滑轨固定块、滑轨活动块、步进电机、直线滑轨、固定导体触点、活动导体触点、滚珠丝杠、光敏传感器、电流传感器,所述滑轨活动块位于所述滑轨固定块与所述步进电机间,所述滑轨固定块被固定,所述滑轨活动块与所述直线导轨构成滑动副,所述固定导体触点被固定于所述滑轨固定块,所述活动导体触点被固定于所述滑轨活动块,所述活动导体触点与所述固定导体触点具有共同的水平轴线且两者间有水平间距。本发明的有益效果在于:通过闭环控制,实现自动地持续拉弧。
技术研发人员:汤湦,胡文权,张玲杰,钱燕娟,钱飞龙,葛鹏飞,侯俊义
受保护的技术使用者:上海航空电器有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!