直线度误差和位置同时测量的检测装置及测试方法与流程
1.本发明涉及高端装备制造技术领域,具体涉及直线度误差和位置同时测量的检测装置及测试方法。
背景技术:
2.近年来,我国在数控机床制造上已经有了很大的发展和进步,但是无论在性能稳定性和可靠性,还是在精度水平上与国外先进水平还有一定差距。数控机床作为实现超精密加工的关键载体,它决定了零件加工的精度、效率和可靠性。目前超精密加工技术已达到亚微米级加工精度,超精密零件加工误差小于 0.1μm,表面粗糙度ra小于0.0025μm。要实现零件的超精密加工,数控机床加工的精度必须高于0.1μm。这对精密数控机床的加工制造提出了更高的要求,涉及高精度的校准、测试计量。数控机床的检测与校准是机床工具行业和机械加工行业的关键环节,也是保证加工精度及产品质量的重要手段。数控机床的加工精度受到几何误差、运动误差、切削力误差、热误差、夹具误差、伺服误差、刀具磨损误差等影响,其中,以直线度为主的几何误差是主要误差源。为此,可对机床运动进行直线度测试以提高其加工精度。
3.机床在运动过程中当存在直线度误差时,采用相对于机床更高精度的检测仪器,如采用测量精度较高的激光直线度干涉仪对运动误差进行检测,来补偿机床的运动轴误差,协助调整机床的机械结构和对误差进行补偿,以保证和提高机床的加工精度。随着加工精度和质量水平要求的提高,机床运动中直线度误差参数的实时测量,并反馈给伺服系统和机械运动部分,实现对数控机床加工精度的补偿是保证和提高数控机床加工精度的重要技术手段。
4.目前国内外研究和应用的直线度计量检测技术根据是否以激光为载体可以分为两类:非激光类直线度测量技术和激光类直线度测量技术。其中非激光类直线度测量技术主要包括测微仪、拉丝检验、电子水平仪等测量技术,过程简单、成本较低且对环境要求不高,但是其测量精度低,测量工作量较大,常用在对直线度测量精度要求不高的场合。目前国内外高精度的直线度测量技术及装置大都是采用激光类直线度测量技术,激光具有强度高而集中,频率单一,发散小等卓越性能,比较成功的范例是利用激光外差干涉仪及其直线度组件测量直线度。激光直线度测量技术按照测量原理又可以分为激光准直测量技术和激光干涉测量技术。
5.激光准直测量技术主要是利用激光高方向性和高亮度的特性,通常使用位置敏感探测器(psd)、四象限探测器(qpd)或电荷耦合器(ccd)作为直线度误差的感测元件,跟随被测对象运动,当被测对象存在直线度误差时,感测元件将会偏离基准直线,通过检测偏移量,实现直线度误差的测量。
6.与激光准直直线度测量技术相比,激光干涉直线度测量技术具有米溯源性、测量分辨率高等优点。激光干涉测量技术是利用分光元件来产生两束对称的测量光束,通过检测两束测量光束之间的光程差,实现直线度误差的测量。在激光干涉直线度测量技术中,最
典型的代表是由渥拉斯顿棱镜和反射镜组成的激光直线度干涉仪。目前,国际上顶尖的高精密测量设备制造厂商的直线度测量组件大部分都基于激光直线度干涉仪设计制造。激光直线度干涉仪根据在测量期间以渥拉斯顿棱镜还是反射镜作为移动传感器可以分为两种类型。
7.第一类激光直线度干涉仪是以渥拉斯顿棱镜为移动测量镜,跟随被测对象运动,反射镜被固定在合适位置。第二类激光直线度干涉仪是以反射镜为移动测量镜,跟随被测对象运动,渥拉斯顿棱镜被固定。通过激光外差干涉法分别测量两个v形测量光束的位移,这类激光直线度干涉仪可以同时获得直线度误差和位移。
8.综合以上直线度测量技术的研究分析表明,与其他直线度测量技术相比,激光干涉直线度测量技术具有米溯源性、测量分辨率高等优点,但该方法存在以下关键问题需待解决:第一类激光直线度干涉仪以渥拉斯顿棱镜为移动测量镜,可以避免被测对象旋转对直线度测量结果的影响,但其仅能实现直线度误差的测量,而无法获取直线度误差所在的位置信息。第二类激光直线度干涉仪以反射镜为移动测量镜,可以实现直线度误差及其位置的同时测量,但直线度误差以及位移的测量结果受反射镜旋转影响而导致测量偏差。
9.因此,记得一种改进的渥拉斯顿棱镜感测式激光外差干涉直线度误差及其位置同时测量技术,解决直线度误差及其位置信息同时获取、反射镜旋转而导致的直线度测量偏差等问题,开展新型激光干涉直线度测量技术的相关科学研究与应用,为数控机床导轨直线度计量测试提供新的实现方式,具有重要的研究价值和应用前景。
技术实现要素:
10.本发明的目的是针对现有技术中存在的上述问题,提供了直线度误差和位置同时测量的检测装置及测试方法。
11.为了实现上述发明目的,本发明采用了以下技术方案:直线度误差和位置同时测量的检测装置,应用于精密数控机床,包括控制端以及依次设置的双频激光器、偏振分光镜、普通分光镜、半透半反射镜、渥拉斯顿棱镜及双直角棱镜;
12.双频激光器用于发出两个频率不同且偏振方向相互正交的线偏振光;
13.偏振分光镜一侧依次设有第一偏振片和第一光电探测器,该第一光电探测器用于接收第一偏振片干涉过的两束光,以此作为位移参考信号;
14.普通分光镜一侧依次设有第二偏振片和第二光电探测器,另一侧依次设有四分之一波片和反射镜,反射镜用于反射经过四分之一波片的反射光,第二光电探测器用于接收第二偏振片干涉过的两束光,以此作为位移测量信号;
15.半透半反射镜用于将从普通分光镜发出的透射光分为反射光和透射光,反射光作为位移测量光束,且半透半反射镜和渥拉斯顿棱镜组合作为移动测量镜;
16.渥拉斯顿棱镜接收从半透半反射镜发出的透射光的同一侧依次设有二分之一波片、偏振分光镜及第三光电探测器,该偏振分光镜另一侧设有第四光电探测器;
17.双直角棱镜用于反射经渥拉斯顿棱镜后分成的两束相互正交的线偏振光,使其返回渥拉斯顿棱镜后在渥拉斯顿棱镜重组为一束直线度测量光束;
18.二分之一波片用于将直线度测量光束的偏振方向旋转45
°
;
19.偏振分光镜用于将直线度测量光束分光并在s偏振方向和p偏振方向干涉;
20.第三光电探测器和第四光电探测器用于分别接收偏振分光镜干涉后的光束,以此产生一对直线度相位差分信号;
21.控制端分别与第一光电探测器、第二光电探测器、第三光电探测器及第四光电探测器通信连接。
22.工作原理及有益效果:1、与现有技术相比,本技术采用以渥拉斯顿棱镜和半反射镜组合作为移动测量镜,以第一光电探测器输出信号为参考,结合第二光电探测器检测位移,利用第三电探测器和第四光电探测器检测直线度误差,并根据测得的非线性误差对直线度测量结果进行补偿,实现高精度的直线度与位移同时测量。
23.2、同时利用渥拉斯顿棱镜对旋转角度不敏感的特性,避免了测量镜旋转导致的直线度测量偏差。
24.进一步地,从普通分光镜经过发出的反射光经过四分之一波片后被反射镜反射,再次通过四分之一波片后,两正交线偏振光偏振方向均改变90
°
,之后透射通过普通分光镜,以此作为位移参考光束。
25.进一步地,位移测量光束返回普通分光镜与位移参考光束汇合并再次被普通分光镜分光,经过第二偏振片被干涉,被第二光电探测器接收。
26.进一步地,控制端包括fpga信号处理板和上位机,fpga信号处理板上设有至少四个ad采集输入端口,分别与所有光电探测器通信连接。
27.进一步地,fpga信号处理板上设有混频滤波电路和相位差分解调器。
28.进一步地,双频激光器为氦氖激光器,波长为633nm。
29.进一步地,双直角棱镜通过两直角棱镜以165
°
夹角胶合,且在入射面镀有增透膜。
30.进一步地,偏振分光镜以1:3分光,普通分光镜和偏振分光镜均以1:1 分光。
31.进一步地,普通分光镜和不改变光的偏振性,偏振分光镜改变光的偏振性,以使得p光和s光完全分开。
32.直线度误差和位置同时测量的检测装置测量方法,运用上述的直线度误差和位置同时测量的检测装置,包括以下步骤:
33.将移动测量镜安装于被测对象上;
34.开启双频激光器发出两个频率不同且偏振方向相互正交的线偏振光;
35.分别获取位移参考信号、位移测量信号及一对直线度相位差分信号;
36.根据位移参考信号和位移测量信号计算得到位移信息;
37.根据一对直线度相位差分信号计算得到直线度误差,以该直线度误差对直线度测量结果进行补偿得到补偿后的直线度;
38.输出位移信息和直线度信息。
附图说明
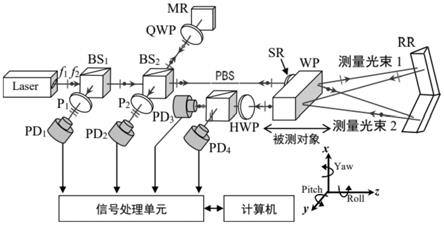
39.图1是本发明的结构示意图;
40.图2是本发明的信号处理系统(控制端)的框架图。
41.图中,laser、双频激光器;bs1、偏振分光镜;bs2、普通分光镜;pbs、偏振分光镜;qwp、四分之一波片;mr、反射镜;wp、渥拉斯顿棱镜wp;sr、半透半反射镜;rr、双直角棱镜;hwp、二分之一波片;p1、第一偏振片;p2、第二偏振片;pd1、第一光电探测器;pd2、第二光电
探测器;pd3、第三光电探测器;pd4、第四光电探测器。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
43.本领域技术人员应理解的是,在本发明的披露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
44.目前,与其他直线度测量技术相比,激光干涉直线度测量技术具有米溯源性、测量分辨率高等优点,但该方法存在以下关键问题需待解决:第一类激光直线度干涉仪以渥拉斯顿棱镜wp为移动测量镜,可以避免被测对象旋转对直线度测量结果的影响,但其仅能实现直线度误差的测量,而无法获取直线度误差所在的位置信息。第二类激光直线度干涉仪以反射镜mr为移动测量镜,可以实现直线度误差及其位置的同时测量,但直线度误差以及位移的测量结果受反射镜mr旋转影响而导致测量偏差。
45.因此,本技术项目从数控机床制造业计量检测需求出发,开展数控机床导轨直线度计量测试技术研究与应用,提出一种改进的渥拉斯顿棱镜wp感测式激光外差干涉直线度误差及其位置同时测量技术,解决直线度误差及其位置信息同时获取、反射镜mr旋转而导致的直线度测量偏差等问题,开展新型激光干涉直线度测量技术的相关科学研究与应用,为数控机床导轨直线度计量测试提供新的实现方式,具有重要的研究价值和应用前景。
46.本技术针对数控机床制造业对精密直线度测量技术需求,开展数控机床导轨直线度计量测试技术研究与应用,提出一种渥拉斯顿棱镜感测式激光外差干涉直线度误差及其位置同时测量技术,利用结合渥拉斯顿棱镜和半透半反射镜 sr的特殊运动传感器,实现直线度误差及其位置同时测量,并利用渥拉斯顿棱镜wp对旋转角度不敏感的特性,避免由于被测物体旋转而导致的直线度测量偏差;采用双相位测量以及双正交锁相放大信号处理技术,减小直线度误差及其位置的测量误差。构建一套新型的高精度直线度测量装置,实现高精度直线度与位移同时测量的技术突破。研究成果将以新型直线度计量测试装置的形式,应用于数控机床制造计量测试等领域,提升数控机床产品性能。
47.本技术的核心点在于采用以渥拉斯顿棱镜和半透半反射镜sr组合作为移动测量镜,以第一光电探测器pd1输出信号为参考,结合第二光电探测器pd2检测位移,利用第三电探测器和第四光电探测器pd4检测直线度误差,并根据测得的非线性误差对直线度测量结果进行补偿,实现高精度的直线度与位移同时测量。同时利用渥拉斯顿棱镜wp对旋转角度不敏感的特性,避免了测量镜旋转导致的直线度测量偏差。
48.实施例1
49.具体实施方式如图1所示,本直线度误差和位置同时测量的检测装置包括控制端以及依次设置的双频激光器laser、偏振分光镜bs1、普通分光镜bs2、半透半反射镜sr、渥拉
斯顿棱镜wp及双直角棱镜rr;
50.其中,双频激光器laser用于发出两个频率不同且偏振方向相互正交的线偏振光。
51.在本实施例中,双频激光器laser采用he-ne激光器(氦氖激光器),参考频率1.9至2.4mhz,直径6mm,最小输出功率180uw,波长为633nm。
52.其中,偏振分光镜bs1一侧依次设有第一偏振片p1和第一光电探测器pd1 ,该第一光电探测器pd1用于接收第一偏振片p1干涉过的两束光,以此作为位移参考信号。
53.在本实施例中,偏振分光镜bs1参数为:大小分光波段为 450-650nm,分光规格为1:3分光,不改变光的偏振性。
54.其中,普通分光镜bs2一侧依次设有第二偏振片p2和第二光电探测器pd2 ,另一侧依次设有四分之一波片qwp和反射镜mr,反射镜mr用于反射经过四分之一波片qwp的反射光,第二光电探测器pd2用于接收第二偏振片p2干涉过的两束光,以此作为位移测量信号。
55.在本实施例中,普通分光镜bs2参数为:大小分光波段为 450-650nm,分光规格为1:1分光,不改变光的偏振性。
56.在本实施例中,四分之一波片qwp参数为:零级1/4波片,大小,采用sm05螺纹安装座,波长633nm。
57.在本实施例中,反射镜mr参数为:波长633nm,反射率99.9%,大小。
58.其中,半透半反射镜sr用于将从普通分光镜bs2发出的透射光分为反射光和透射光,反射光作为位移测量光束,且半透半反射镜sr和渥拉斯顿棱镜wp 组合作为移动测量镜。
59.在本实施例中,半透半反射镜sr参数为:透反比50:50
±
5%,波长400-700nm 。l
60.其中,渥拉斯顿棱镜wp接收从半透半反射镜sr发出的透射光的同一侧依次设有二分之一波片hwp、偏振分光镜pbs及第三光电探测器pd3,该偏振分光镜pbs另一侧设有第四光电探测器pd4。
61.在本实施例中,渥拉斯顿棱镜wp采用方解石基底,光束分离角15
°
,波长 350-700nm。
62.在本实施例中,二分之一波片hwp为零级半波片,大小采用sm05 螺纹安装座,波长633nm。二分之一波片hwp用于将直线度测量光束的偏振方向旋转45
°
。
63.在本实施例中,偏振分光镜pbs参数为:大小分光波段为 450-650nm,分光规格为1:1分光,改变光的偏振性,p光和s光完全分开。偏振分光镜pbs用于将直线度测量光束分光并在s偏振方向和p偏振方向干涉;
64.其中,双直角棱镜rr用于反射经渥拉斯顿棱镜wp后分成的两束相互正交的线偏振光,使其返回渥拉斯顿棱镜wp后在渥拉斯顿棱镜wp重组为一束直线度测量光束。
65.在本实施例中,双直角棱镜rr通过两个直角棱镜以165
°
胶合,入射面镀增透膜,直角棱镜的高度h=150mm。
66.其中,第三光电探测器pd3和第四光电探测器pd4用于分别接收偏振分光镜pbs干涉后的光束,以此产生一对直线度相位差分信号。
67.在本实施例中,第一偏振片p1和第二偏振片p2均为线偏振片,大小,波长633nm。
68.在本实施例中,第一光电探测器pd1、第二光电探测器pd2、第三光电探测器pd3及第四光电探测器pd4均为硅探测器,采用固定增益,波长400-1100nm ,带宽10mhz。
69.其中,控制端分别与第一光电探测器pd1、第二光电探测器pd2、第三光电探测器pd3及第四光电探测器pd4通信连接。
70.在本实施例中,如图2所示,控制端(信号处理系统或或者叫图1中的信号处理单元)采用双正交锁相放大解调。四路干涉信号由ad采集输入fpga信号处理板,与两路内部正交信号分别进行混频滤波(混频滤波器或混频滤波模块)和相位解调(相位差分解调器或相位差分解调模块),通过解调算法获得相位信息。利用相位信息实现直线度误差及其位置信息获取。上位机(图1中的计算机)的数据采集软件将信号处理板采集的相位测量数据进行处理并控制其状态,计算出最终相位值和位移值并将测量结果予以显示。
71.在本实施例中,光路机械结构方面可采用zemax光学仿真软件和solidworks计算机辅助设计工具软件进行光路结构的优化设计和三维机械图的设计及仿真。拟利用cad软件进行机械加工图纸的绘制,进行零部件的实际加工制作与装配。
72.实施例二
73.直线度误差和位置同时测量的检测装置测量方法,运用实施例1的直线度误差和位置同时测量的检测装置,包括以下步骤:
74.将移动测量镜安装于被测对象上;
75.开启双频激光器laser发出两个频率不同且偏振方向相互正交的线偏振光;
76.分别获取位移参考信号、位移测量信号及一对直线度相位差分信号;
77.根据位移参考信号和位移测量信号计算得到位移信息;
78.根据一对直线度相位差分信号计算得到直线度误差,以该直线度误差对直线度测量结果进行补偿得到补偿后的直线度;
79.输出位移信息和直线度信息。
80.在本实施例中,双频激光器laser发出偏振方向相互正交的线偏振光,频率分别为f1和f2,经过偏振分光镜bs1后被分光,反射光p光和s光经过第一偏振片p1发生干涉,被第一光电探测器pd1接收产生位移参考信号,透射光经过普通分光镜bs2后被分光,反射光经过四分之一波片qwp后被反射镜mr反射,再次通过四分之一波片qwp后两正交线偏振光偏振方向均改变90
°
,之后透射通过普通分光镜bs2,作为位移参考光束。
81.普通分光镜bs2分光后的透射光到达半透半反射镜sr半透半反射镜sr后被分为两部分,反射光作为位移测量光束,返回普通分光镜bs2后与位移参考光束汇合,之后汇合光束经过普通分光镜bs2后分光,在第二偏振片p2上发生干涉,被第二光电探测器pd2接收,产生位移测量信号。
82.半透半反射镜sr透射光经过渥拉斯顿棱镜wp后以一定角度分成两束相互正交的线偏振光,这两束线偏振光被双直角棱镜rr反射后返回到渥拉斯顿棱镜 wp并在另一侧重组为一束光,重组光作为直线度测量光束经过二分之一波片hwp 后,重组光偏振方向旋转45
°
,经偏振分光镜pbs分光后在s偏振方向和p偏振方向发生干涉,分别被第三光电探测器pd3和第四光电探测器pd4接收产生一对直线度相位差分信号。
83.如此,双频激光器laser输出的偏振方向正交的两线偏振光为e
x
和ey,记为:
[0084][0085][0086]
其中,a,b表示激光器输出两线偏振光表示幅值,单位v;f1和f2为线偏振光的频率,单位mhz;表示为两线偏振光的初始相位,单位为rad; t表示时间,单位是s。
[0087]
由于第一光电探测器pd1和第二光电探测器pd2接受位移参考信号和测量信号,探测器频响有限,无法响应高频项,保留差频项,光电探测器最终输出的位移参考信号(电流信号)i1和位移测量信号(电流信号)i2为:
[0088][0089][0090]
其中,δf表示频差,表示测量镜移动时光程变化引入的相位差,与被测位移δl的关系式为:
[0091][0092]
其中,n表示空气折射率,λ表示激光波长。如此就可以计算出被测位移的位移量δl。
[0093]
在本实施例中,两个测量光束在渥拉斯顿棱镜wp内部移动前后的总体光程变化后:δl1=(1-cosθ)δz-sinθ*δxδl2=(1-cosθ)δz+sinθ*δx如此,两个测量光束的光程变化之差为:δl=δl
1-δl2=2sinθ*δxδx=(δl
3-δl4)/2sinθ=δl
x
/2sinθ=λ*δφ
x
/8πsinθ可知,第三光电探测器pd3和第四光电探测器pd4的电流信号去除直流分量后为:其中φ
x
为两个直线度测量光束引入的相位差。
[0094][0095][0096][0097][0098][0099][0100][0101]
[0102][0103]
最后,所有光电探测器采集到的干涉信号经过混频滤波器进行混频和滤波处理后,可以得到包含待测相位信息的正交信号,通过计算机(上位机)对正交信号进行反正切运算(现有技术手段),即可获得直线度和位移的相位值。
[0104]
因此,本技术依据激光外差干涉测量非线性误差分析与测量光路特性,提出一种激光外差干涉直线度测量非线性误差补偿技术。采用双相位测量法对两路直线度测量光束的相位差进行差分检测,获得对非线性误差进行补偿,同时采用双正交锁相放大信号处理进一步补偿相位解调中非线性误差,从而降低直线度测量误差。
[0105]
本发明未详述部分为现有技术,故本发明未对其进行详述。
[0106]
可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
[0107]
尽管本文较多地使用了双频激光器laser、偏振分光镜bs1、普通分光镜bs2、偏振分光镜pbs、四分之一波片qwp、反射镜mr、渥拉斯顿棱镜wp、半透半反射镜sr、双直角棱镜rr、二分之一波片hwp、第一偏振片p1、第二偏振片p2、第一光电探测器pd1、第二光电探测器pd2、第三光电探测器pd3、第四光电探测器pd4等术语,但并不排除使用其他术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
[0108]
本发明不局限于上述最佳实施方式,任何人在本发明的启示下都可得出其他各种形式的产品,但不论在其形状或结构上做任何变化,凡是具有与本技术相同或相近似的技术方案,均落在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1