清洁机器人的地图更新方法及清洁机器人与流程
本申请涉及清洁机器人,特别涉及一种清洁机器人的地图更新方法及清洁机器人。
背景技术:
1、目前,清洁机器人已经广泛运用于家庭。清洁机器人在运行过程中,由于存在轮子打滑、机器人倾斜,会导致激光测量不准等问题,从而生成的环境地图极易发生偏差,影响正常任务的完成。
2、传统的解决方法是:依靠用户判别当前地图是否已损坏,并由用户选择是否重新建图。如此,增加了用户的操作,用户体验不佳。
技术实现思路
1、本申请实施例提供了清洁机器人的地图更新方法,用以在地图损坏时无需用户参与操作,自动完成地图更新。
2、本申请实施例提供了一种清洁机器人的地图更新方法,包括:
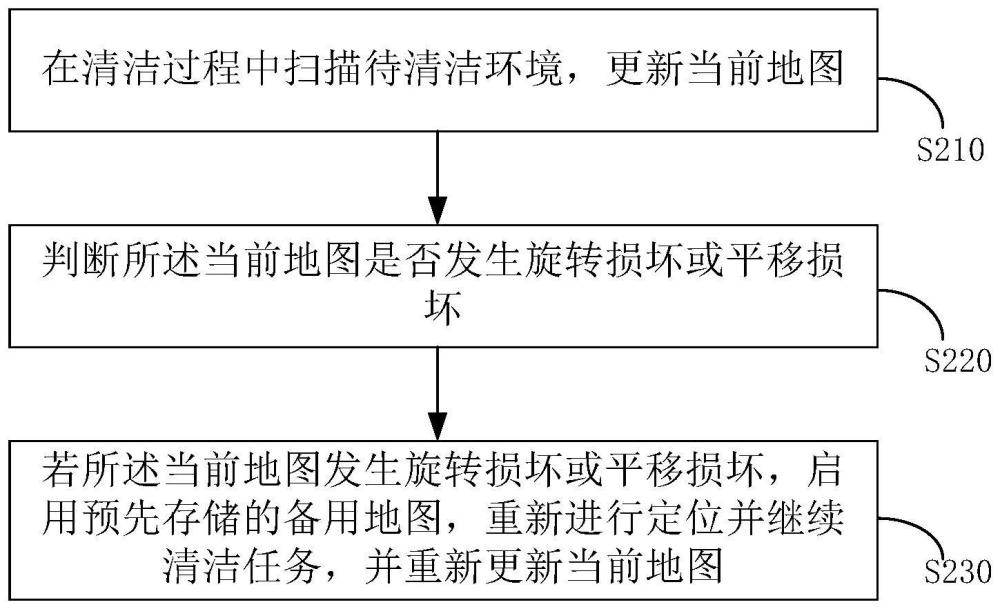
3、在清洁过程中扫描待清洁环境,更新当前地图;
4、判断所述当前地图是否发生旋转损坏或平移损坏;
5、若所述当前地图发生旋转损坏或平移损坏,启用预先存储的备用地图,重新进行定位并继续清洁任务,并重新更新当前地图。
6、在一实施例中,所述判断所述当前地图是否发生旋转损坏或平移损坏,包括:
7、统计所述当前地图中第一线段的数量,所述第一线段是线段长度大于预设长度且与所述备用地图中坐标轴之间的夹角大于预设角度的线段;
8、若所述第一线段的数量大于第一阈值,判定所述当前地图发生旋转损坏。
9、在一实施例中,所述判断所述当前地图是否发生旋转损坏或平移损坏,包括:
10、统计所述当前地图中第一线段的数量,所述第一线段是线段长度大于预设长度且与所述备用地图中最长墙壁线段之间的夹角大于预设角度的线段;
11、若所述第一线段的数量大于第一阈值,判定所述当前地图发生旋转损坏。
12、在一实施例中,所述判断所述当前地图是否发生旋转损坏或平移损坏,包括:
13、统计所述当前地图中第二线段的数量,所述第二线段是线段长度大于预设长度且与备用地图中相邻的平行线段之间的平行间距在阈值范围内的线段;
14、若所述第二线段的数量大于第二阈值,判定所述当前地图发生平移损坏。
15、在一实施例中,所述在清洁过程中扫描待清洁环境,构建当前地图之前,所述方法还包括:
16、构建一条在所述待清洁环境中远离障碍物的移动路径;
17、沿着所述移动路径进行扫描,构建所述备用地图。
18、在一实施例中,所述沿着所述移动路径进行扫描,构建所述备用地图,包括:
19、沿着所述移动路径进行扫描,构建环境地图;
20、对所述环境地图进行旋转,使得所述环境地图中最长墙壁线段的方向平行于预设的x轴方向或y轴方向,得到所述备用地图。
21、在一实施例中,所述方法还包括:
22、定时保存最新构建的无损坏的地图,作为所述备用地图。
23、在一实施例中,所述方法还包括:
24、若清洁机器人在清洁完待清洁环境后,地图未发生损坏,则将清洁完后更新的地图作为所述备用地图,供下次使用。
25、在一实施例中,所述方法还包括:
26、若多次启用所述备用地图后,多次判断出现地图损坏,则重新构建备用地图。
27、本申请实施例还提供了一种清洁机器人,所述清洁机器人包括:
28、导航传感器和陀螺仪,用于扫描清洁机器人周围环境信息,并对清洁机器人进行定位;
29、处理器;
30、以及用于存储处理器可执行指令的存储器;
31、其中,所述处理器被配置为根据导航传感器和陀螺仪数据执行上述清洁机器人的地图更新方法。
32、本申请实施例还提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序可由处理器执行以完成上述清洁机器人的地图更新方法。
33、本申请上述实施例提供的清洁机器人的地图更新方法、清洁机器人和存储介质,在判断出当前地图发生旋转损坏或平移损坏时,可以立即启用预先存储的备用地图,重新进行定位并继续清洁任务,无需用户判断地图是否已损坏,也无需用户选择是否重新建图,可以自动完成当前地图是否损坏的判定,并自动启动备用地图,无需重复建图,提高了清洁机器人的智能化水平,减少了用户操作,提升了用户体验。
34、在一实施例中,在清洁开始前构建一条在待清洁环境中远离障碍物的移动路径,进而沿着所述移动路径进行扫描,构建备用地图,可以使构建的备用地图发生损坏的可能性更小,使判断当前地图是否发生平移损坏或旋转损坏的准确性更高。
技术特征:
1.一种清洁机器人的地图更新方法,其特征在于,包括:
2.根据权利要求1所述的清洁机器人的地图更新方法,其特征在于,所述判断所述当前地图是否发生旋转损坏或平移损坏,包括:
3.根据权利要求1所述的清洁机器人的地图更新方法,其特征在于,所述判断所述当前地图是否发生旋转损坏或平移损坏,包括:
4.根据权利要求1所述的清洁机器人的地图更新方法,其特征在于,所述判断所述当前地图是否发生旋转损坏或平移损坏,包括:
5.根据权利要求1所述的清洁机器人的地图更新方法,其特征在于,所述在清洁过程中扫描待清洁环境,构建当前地图之前,所述方法还包括:
6.根据权利要求5所述的清洁机器人的地图更新方法,其特征在于,所述沿着所述移动路径进行扫描,构建所述备用地图,包括:
7.根据权利要求1所述的清洁机器人的地图更新方法,其特征在于,所述方法还包括:
8.根据权利要求1所述的清洁机器人的地图更新方法,其特征在于,所述方法还包括:
9.根据权利要求1所述的清洁机器人的地图更新方法,其特征在于,所述方法还包括:
10.一种清洁机器人,其特征在于,所述清洁机器人包括:
技术总结
本申请提供一种清洁机器人的地图更新方法及清洁机器人,该方法包括:在清洁过程中扫描待清洁环境,更新当前地图;判断所述当前地图是否发生旋转损坏或平移损坏;若所述当前地图发生旋转损坏或平移损坏,启用预先存储的备用地图,重新进行定位并继续清洁任务,并重新更新当前地图。该方案无需用户判断地图是否已损坏,也无需用户选择是否重新建图,可以自动完成当前地图是否损坏的判定,并自动启动备用地图,无需重复建图,提高了清洁机器人的智能化水平,减少了用户操作,提升了用户体验。
技术研发人员:朱泽春,孙斌
受保护的技术使用者:尚科宁家(中国)科技有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!