一种基于目标信息的IMU在线快速标定方法与流程
一种基于目标信息的imu在线快速标定方法
技术领域
1.本发明属于惯性导航技术领域,具体涉及一种imu在线快速标定方法。
背景技术:
2.机载光电吊舱实现高精度地理跟踪的关键组件为定位定姿系统(pos),由惯性测量单元(imu)和导航解算板组成,惯性测量单元安装于稳定平台,与瞄准线刚性固连,能够敏感瞄准线的地理指向。执行地理跟踪任务时,根据输入的目标gps坐标,结合光电吊舱的gps坐标和稳定平台的姿态信息,即可计算出目标相对于吊舱的角度信息。控制吊舱瞄准线指向目标,即可在吊舱图像中快速发现目标。特别适用于目标情报信息的快速察打任务,能够快速锁定目标,及时毁伤。
3.在实际装配过程中,惯性测量单元的轴线和吊舱瞄准线之间存在安装误差,无法做到完全重合。安装误差的存在导致根据目标gps坐标计算出来的目标相对于吊舱的角度信息与实际存在偏差,而机载光电吊舱搭载的长焦距电视传感器或红外热像仪的视场角很小,偏差的存在有可能导致在吊舱图像中无法找到目标。因此需要标定修正惯性测量单元的轴线和吊舱瞄准线之间存在安装误差。
4.传统的imu标定需要在吊舱装机后,飞行1~2个架次,进行多次imu标定及修正,来提高目标定位、地理跟踪以及线性位移补偿的精度。目前国内其他光电吊舱的imu标定都无法实现快速修正,需要进行多次飞行试验和事后计算,而且计算结果往往和实际还有误差。
技术实现要素:
5.为了克服现有技术的不足,本发明提供了一种基于目标信息的imu在线快速标定方法,选定起飞机场的一个已知经纬高信息目标点,飞机起飞离场后,将目标点的经纬高发送给吊舱,进入地理定位模式,根据计算出来的目标经纬高和目标实际的经纬高之间的偏差,计算出imu的安装偏差角;将imu的安装偏差角写入吊舱flash,即可完成标定。一般飞机在机场附近盘旋1圈即可完成,标定时间小于15分钟,标定完成后飞机直接执行后续任务。本发明的imu在线快速标定方法,相较传统的imu标定方法,标定速度更快,不占用额外飞行架次,可移植到其他型号光电产品中,具有通用性和普适性。
6.本发明解决其技术问题所采用的技术方案包括如下步骤:
7.步骤1:在机场选定一个已知经纬高的建筑物作为标定目标点;
8.步骤2:在地面给吊舱通电,吊舱瞄准线指向机头正前方;
9.步骤3:飞机起飞后在机场上空盘旋,定位定姿系统pos数据逐渐收敛,当航向误差小于0.1度时,数据收敛完成;
10.步骤4:当pos数据收敛后,使用激光测照器测量出标定目标点距离吊舱的距离,结合吊舱自身的经纬高和姿态信息,计算出标定目标点的经纬高;
11.步骤5:使用步骤4计算的标定目标点的经纬高数据和标定目标点的实际经纬高数据,计算出距离偏差;
12.步骤6:用φ、θ、γ表示imu轴线与瞄准线之间的安装偏差角,其中φ为方位方向的安装偏差角,θ为俯仰方向的安装偏差角、γ为横滚方向的安装偏差角;
13.步骤7:利用步骤5得到的距离偏差计算安装偏差角φ、θ、γ:
14.步骤7-1:设定安装偏差角的取值范围在-3度~+3度之间;
15.步骤7-2:设置三层嵌套循环,最外层循环为横滚安装偏差角γ,中间层循环为方位安装偏差角φ,最内层循环为俯仰安装偏差角θ;每层循环的步长取0.1度,依次计算出-3度~+3度之间每组φ、θ、γ对应的定位距离偏差,取最小的距离偏差对应的φ、θ、γ的区间;
16.步骤7-3:减小三层嵌套循环的步长至0.01度,在上一步的取值区间内以0.01的步长再次依次计算出每组φ、θ、γ对应的定位距离偏差,取最小的距离偏差对应的φ、θ、γ值;
17.步骤7-4:验证该组安装偏差角φ、θ、γ对地理跟踪和定位精度的影响,若地理跟踪功能下目标能进入最小视场内,且定位精度满足要求,即认定此组安装偏差角φ、θ、γ为最优解;否则,重复步骤7-2到步骤7-4,直至满足要求;
18.步骤7-5:将最优的安装偏差角φ、θ、γ写入吊舱flash内存储。
19.本发明的有益效果如下:
20.本发明的imu在线快速标定方法,相较传统的imu标定方法,标定速度更快,充分利用起飞阶段的无效任务时间,不占用额外飞行架次;可移植到其他型号光电产品中,具有通用性和普适性。
附图说明
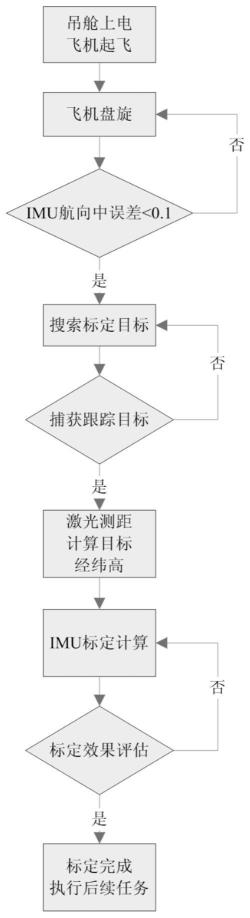
21.图1为本发明imu标定方法任务流程图。
22.图2为本发明惯性测量单元安装示意图。
具体实施方式
23.下面结合附图和实施例对本发明进一步说明。
24.本发明属于惯性导航技术,用途是在飞机起飞后的盘旋时间内,快速标定出imu的安装偏差,提高了吊舱的地理跟踪精度和定位精度。
25.如图1和图2所示,一种基于目标信息的imu在线快速标定方法,包括如下步骤:
26.步骤1:在机场选定一个已知经纬高的建筑物作为标定目标点;
27.步骤2:在地面给吊舱通电,吊舱瞄准线指向机头正前方;
28.步骤3:飞机起飞后在机场上空盘旋,定位定姿系统pos数据逐渐收敛,当航向误差小于0.1度时,数据收敛完成;
29.步骤4:当pos数据收敛后,使用激光测照器测量出标定目标点距离吊舱的距离,结合吊舱自身的经纬高和姿态信息,计算出标定目标点的经纬高;
30.步骤5:使用步骤4计算的标定目标点的经纬高数据和标定目标点的实际经纬高数据,计算出距离偏差;
31.步骤6:用φ、θ、γ表示imu轴线与瞄准线之间的安装偏差角,其中φ为方位方向的安装偏差角,θ为俯仰方向的安装偏差角、γ为横滚方向的安装偏差角;
32.步骤7:利用步骤5得到的距离偏差计算安装偏差角φ、θ、γ:
33.步骤7-1:设定安装偏差角的取值范围在-3度~+3度之间;
34.步骤7-2:设置三层嵌套循环,最外层循环为横滚安装偏差角γ,中间层循环为方位安装偏差角φ,最内层循环为俯仰安装偏差角θ;每层循环的步长取0.1度,依次计算出-3度~+3度之间每组φ、θ、γ对应的定位距离偏差,取最小的距离偏差对应的φ、θ、γ的区间;
35.步骤7-3:减小三层嵌套循环的步长至0.01度,在上一步的取值区间内以0.01的步长再次依次计算出每组φ、θ、γ对应的定位距离偏差,取最小的距离偏差对应的φ、θ、γ值;
36.步骤7-4:验证该组安装偏差角φ、θ、γ对地理跟踪和定位精度的影响,若地理跟踪功能下目标能进入最小视场内,且定位精度满足要求,即认定此组安装偏差角φ、θ、γ为最优解;否则,重复步骤7-2到步骤7-4,直至满足要求;
37.步骤7-5:将最优的安装偏差角φ、θ、γ写入吊舱flash内存储。
技术特征:
1.一种基于目标信息的imu在线快速标定方法,其特征在于,包括如下步骤:步骤1:在机场选定一个已知经纬高的建筑物作为标定目标点;步骤2:在地面给吊舱通电,吊舱瞄准线指向机头正前方;步骤3:飞机起飞后在机场上空盘旋,定位定姿系统pos数据逐渐收敛,当航向误差小于0.1度时,数据收敛完成;步骤4:当pos数据收敛后,使用激光测照器测量出标定目标点距离吊舱的距离,结合吊舱自身的经纬高和姿态信息,计算出标定目标点的经纬高;步骤5:使用步骤4计算的标定目标点的经纬高数据和标定目标点的实际经纬高数据,计算出距离偏差;步骤6:用φ、θ、γ表示imu轴线与瞄准线之间的安装偏差角,其中φ为方位方向的安装偏差角,θ为俯仰方向的安装偏差角、γ为横滚方向的安装偏差角;步骤7:利用步骤5得到的距离偏差计算安装偏差角φ、θ、γ:步骤7-1:设定安装偏差角的取值范围在-3度~+3度之间;步骤7-2:设置三层嵌套循环,最外层循环为横滚安装偏差角γ,中间层循环为方位安装偏差角φ,最内层循环为俯仰安装偏差角θ;每层循环的步长取0.1度,依次计算出-3度~+3度之间每组φ、θ、γ对应的定位距离偏差,取最小的距离偏差对应的φ、θ、γ的区间;步骤7-3:减小三层嵌套循环的步长至0.01度,在上一步的取值区间内以0.01的步长再次依次计算出每组φ、θ、γ对应的定位距离偏差,取最小的距离偏差对应的φ、θ、γ值;步骤7-4:验证该组安装偏差角φ、θ、γ对地理跟踪和定位精度的影响,若地理跟踪功能下目标能进入最小视场内,且定位精度满足要求,即认定此组安装偏差角φ、θ、γ为最优解;否则,重复步骤7-2到步骤7-4,直至满足要求;步骤7-5:将最优的安装偏差角φ、θ、γ写入吊舱flash内存储。
技术总结
本发明公开了一种基于目标信息的IMU在线快速标定方法,选定起飞机场的一个已知经纬高信息目标点,飞机起飞离场后,将目标点的经纬高发送给吊舱,进入地理定位模式,根据计算出来的目标经纬高和目标实际的经纬高之间的偏差,计算出IMU的安装偏差角;将IMU的安装偏差角写入吊舱Flash,即可完成标定。一般飞机在机场附近盘旋1圈即可完成,标定时间小于15分钟,标定完成后飞机直接执行后续任务。本发明的IMU在线快速标定方法,相较传统的IMU标定方法,标定速度更快,不占用额外飞行架次,可移植到其他型号光电产品中,具有通用性和普适性。具有通用性和普适性。具有通用性和普适性。
技术研发人员:杜明昊 赵胜斌 昝宝亮 韩运峥 纪姝君 甘路涛 陈国强
受保护的技术使用者:中国航空工业集团公司洛阳电光设备研究所
技术研发日:2022.08.08
技术公布日:2022/12/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1