基于二维聚焦分析的卫星导航系统多径干扰信号辨识方法
1.本发明涉及基于二维聚焦分析的卫星导航系统多径干扰信号辨识方法,属于全球导航卫星系统(gnss)定位技术领域,具体涉及一种针对卫星导航系统的多径干扰信号的自适应辨识方法。
背景技术:
2.全球卫星导航系统利用从绕地球轨道运行的多颗卫星发射出的信号,来解算出接收机的位置、速度以及精确的时间。gnss定位至少需要接收到4颗卫星的信号才能解出自身坐标,在空旷的室外环境,终端可以畅通无阻地接收到足够地卫星信号实现高精度定位。但是由于gnss信号属于电磁信号,它在城市、山区等环境下,信号可能会被建筑物、山脉等物体反射,形成多径信号干扰,难以实现高精度定位。
3.gnss卫星发射的信号能够被天线附近的物体反射后再到达接收天线,当出现多条传播路径时,就会出现多径干扰,严重影响系统的定位精度和可靠性。多径干扰是gnss定位的一个显著误差来源,与直达波信号相比,多径信号由于路径变长,所以其相位滞后,幅度也会在反射或散射过程中发生变化,降低接收机的测距精度。
4.对于多径信号的抑制,主要有三种常用的方法,即在频域、时域和空域上进行滤波。频域滤波是指通过在频域中滤掉某些不必要的频率分量来达到抑制效果;时域滤波将多径信号视为参考信号的延时信号,依据某些准则来滤除这些延时分量;空域滤波是用一定形状的波束来通过有用信号或需要方向的信号,并抑制不需要方向的干扰。在空域滤波中,需要对多径信号干扰的方向进行估计和计算。但是传统的波达方向估计算法运算量大,并且存在较大的多径信号辨识误差,使测量结果精度变差。
技术实现要素:
5.有鉴于此,本发明提出基于二维聚焦分析的卫星导航系统多径干扰信号辨识方法,该方法主要通过构建多径干扰模型,利用直达波信号进行二位聚焦,在成像图中判断多径干扰的位置,进而计算多径干扰信号的到达方向,实现多径干扰信号的高精度辨识,首先利用直达波信号进行二位聚焦,在成像图中找到多径干扰信号的响应位置,再根据干扰信号的位置计算得到多径信号到达接收天线的角度,实现对多径信号的自适应识别。
6.本发明通过以下技术方案实现。
7.基于二维聚焦分析的卫星导航系统多径干扰信号辨识方法,该方法的步骤包括:
8.步骤一、使用接收天线对导航信号进行采集得到直达波数据,并记录接收天线与地面的相对几何位置;
9.步骤二、利用步骤一采集到的直达波数据和记录的接收天线与地面的相对几何位置进行二维聚焦成像,得到直达波图像;
10.步骤三、辨识步骤二得到的直达波图像中的多径信号,并记录多径信号的干扰位置;
11.步骤四、根据步骤三记录的多径信号的干扰位置计算多径信号到达接收天线的角度,完成基于二维聚焦分析的卫星导航系统多径干扰信号的辨识。
12.所述的步骤一中,使用接收天线对导航信号进行采集时,时间不低于600s;
13.所述的步骤二中,采用bp算法进行成像,bp成像步骤如下:首先对成像平面进行网格划分,再对导航信号进行距离向脉压,之后计算卫星到每个网格的距离,实现方位向成像,从而得到导航信号的二维聚焦成像结果;
14.所述的步骤三中,提取直达波响应,对剩余图像幅度进行评估,找出多径干扰的位置;
15.所述的步骤四中,利用多径干扰的聚焦位置,结合直达波天线位置,计算各个多径源的参数信息;
16.假设某多径信号干扰的位置用(xn,yn)表示,而接收机位置记为(xa,ya),并且天线的朝向与正北方向夹角为θa,则多径信号干扰与正北方向的夹角θn表示为:
[0017][0018]
该条多径干扰信号到达天线的角度θi为:
[0019]
θi=θ
n-θa[0020]
同理,可以算出图像中其他多径信号到达接收天线的角度,从而实现对各多径信号的高精度自适应辨识。
[0021]
有益效果
[0022]
(1)本发明的方法解决了在导航卫星定位系统中多径信号难以精确辨识的问题,有效降低系统测距误差,降低了系统处理的运算量,提升了定位精度,具有实际应用价值;
[0023]
(2)本发明公开了一种基于二维聚焦分析的卫星导航系统多径干扰信号高精度辨识方法。首先对直达波数据进行二维聚焦成像;然后在直达波成像结果中找到多径干扰的位置,根据多径干扰聚焦的位置,对多径信号源的角度进行计算,达到对多径干扰信号的高精度辨识。
附图说明
[0024]
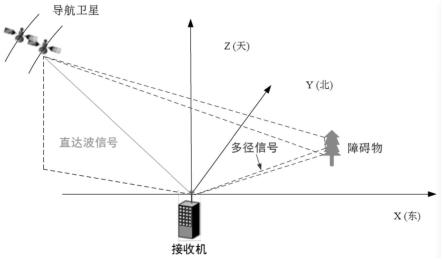
图1为导航信号多径干扰构型示意图。
具体实施方式
[0025]
下面结合附图和实施例对本发明作进一步详细说明。
[0026]
图1为本具体实施方式中导航信号多径干扰的示意图,具体为:导航卫星发射信号被接收机接收,直达波信号为直接被接收的信号,但是卫星信号可能会在场景中经过多次障碍物反射、绕射才被接收天线接收,其相位会有滞后,并且幅度减弱,与直达波信号叠加在一起产生误差,造成多径干扰,影响导航定位系统性能。
[0027]
在经过信号捕获、解调等处理后,接收天线收到的信号可以表示为:
[0028][0029]
式中,as(t-τm)exp(j2πfd)表示接收到的回波信号,其中,a表示回波振幅,s(t)为
卫星发射信号,τm和fd分别表示回波信号的时延和多普勒频率;表示该卫星的一条多径信号,下标i表示多径中的第i个多径信号,w为多径数,ωi表示第i条多径的增益,τn为该多径信号的时延;es(t)为回波通道的噪声。
[0030]
在实际成像中,由多径信号造成干扰,由于多径信号被天线接收,出现了多径信号的响应,降低了图像质量。为此,考虑空域滤波的方法,使得接收天线方向图在多径信号的到达方向上形成窄的零陷,解决多径干扰的问题。然而,多径信号路径较多,难以准确辨识,所以很难对所有多径信号的波达方向进行准确估计。
[0031]
基于此,本发明针对导航定位存在的多径干扰难以准确识别的问题,提出了一种多径信号高精度辨识的方法:首先对直达波数据进行成像;然后在成像结果中找到多径干扰的位置,根据该位置计算该处多径信号到达天线的角度;按照该角度调整天线方向图,抑制多径干扰。
[0032]
实施例
[0033]
一种多径信号高精度辨识的方法,步骤包括:
[0034]
步骤一、直达波数据采集。
[0035]
本实施例于江苏省常熟市搭建了导航卫星信号接收系统,以北斗beidou2_igso5作为发射源,于2021年7月5日进行数据采集实验,实验拓扑结构如图1所示。对导航信号进行长时间(不低于600秒)的数据采集,并记录接收天线的位置。
[0036]
步骤二、导航信号的二维聚焦。
[0037]
对步骤一中采集的长时间的导航信号进行二维聚焦成像,选择地面作为投影平面,将接收天线位置作为成像平面原点,为了获得更高的距离分辨率,可以将北斗信号的b2a和b2b频点进行合成,最后采用bp算法进行成像。bp成像步骤如下:首先对成像平面进行网格划分,再对导航信号进行距离向脉压,之后计算卫星到每个网格的距离,实现方位向成像,从而得到导航信号的二维聚焦成像结果。
[0038]
本实施例中对导航信号进行二维聚焦。
[0039]
步骤三、多径信号辨识。
[0040]
卫星信号在成像图中的响应结果通过模糊函数来表示:
[0041][0042]
其中,p为目标点位置,q为其附近任一目标点的位置。λ表示载波波长,c是光速。φ
tp
、φ
rp
分别为发射机、接收机到目标点p的单位向量。β是双基地角,即φ
tp
和φ
rp
之间的夹角,θ是β角平分线方向的单位向量。ωe是发射机等效角速度,ξ是其等效运动方向。p(~),m(~)分别为距离向和方位向的自相关函数。
[0043]
本实施例中,根据上式,可以对该信号的响应进行提取,之后对剩余图像的噪声水平进行估计,为190db。仍存在部分幅值高于噪声的图像,比噪声高10db的响应均是由多径信号产生的。
[0044]
步骤四、多径信号源参数提取;
[0045]
假设某多径干扰信号的位置用(xn,yn)表示,而接收机位置记为(xa,ya),并且天线的朝向与正北方向夹角为θa,则多径干扰与正北方向的夹角θn表示为:
[0046][0047]
进一步,计算出该条多径干扰信号到达天线的角度θi为:
[0048]
θi=θ
n-θaꢀꢀꢀ
(4)
[0049]
同理,可以算出图像中其他多径信号到达接收天线的角度,从而实现对各多径信号的高精度自适应辨识。
[0050]
本实施例中,共有三处多径信号引起的干扰,位置分别为(430,50)、(478,93)、(553,164),接收机位置为(0,0),接收天线与正北的夹角θa=45
°
。根据式(3)、(4),可以计算出三条多径信号到接收天线的角度分别为38.37
°
、33.99
°
和28.48
°
。
[0051]
综上,本发明提出一种针对卫星导航系统的多径干扰信号的自适应高精度辨识方法,对多径干扰信号源进行准确识别,能够有效降低系统测距误差,降低了系统处理的运算量,提升了定位精度,具有实际应用价值。
[0052]
以上的具体实施例仅描述了本发明的设计原理,该描述中的部件形状,名称可以不同,不受限制。所以,本发明领域的技术人员可以对前述实施例记载的技术方案进行修改或等同替换;而这些修改和替换未脱离本发明创造宗旨和技术方案,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1