地面交通工具通过陌生地形的路线规划的制作方法
本公开内容一般地涉及机器人,并且具体地,涉及自主机器人(诸如自主或半自主交通工具)的设计、构造、操作或使用中的一个或多个。
背景技术:
1、许多现代机器人和其他机器被设计为以提高的自主性操作,并且较少依赖训练有素的操作员来进行安全操作。这些现代机器人中有一些是有人操作的,而另一些则是无人操作的。具体地,各种无人驾驶交通工具包括无人驾驶地面交通工具(ugv)、无人驾驶飞行器(uav)、无人驾驶水面交通工具(usv)、无人驾驶水下交通工具(uuv)、无人驾驶航天器等。近年来,无人驾驶交通工具的使用有所增长,并且这些无人驾驶交通工具的应用范围广泛,包括军用和民用。
2、机器人技术领域的一个重点是改进路线规划,特别是在陌生地形中的路线规划。用于陌生地形的现有路线规划技术使用手动技术,这些技术或者需要预先存在的地形知识,或者需要完成地面侦察。这些技术需要人工路点选择和路线生成,这往往是耗时且人力密集型的技术。
3、现有的路线规划方案还可以使用预先存在的基础地图和卫星数据来评估穿越地形的路径。对于不断变化的地形(诸如有争议的地形、矿场和建筑工地)以及现有地图可能已过时和/或不准确的情况,这种技术会出现问题。
4、基础地图/卫星数据通常仅由一种数据类型(图像)组成,或者受到其准确性和分辨率(低精度和大gsd图像或地形网格)的限制。由于无法快速部署卫星以便进行数据收集,任何使用这种类型数据的路线规划在应用于陌生的不断变化的地形时都是不可靠且无效的。当前的卫星数据方案倾向于产生3至30米范围内的精度水平。相比之下,uav生成的数据精度在5至10厘米之间。这允许更准确的地形分析评估,从而导致更准确和可靠的路线规划。
5、因此,希望有一种系统和方法,其考虑到上面讨论的至少一些问题以及其他可能的问题。
技术实现思路
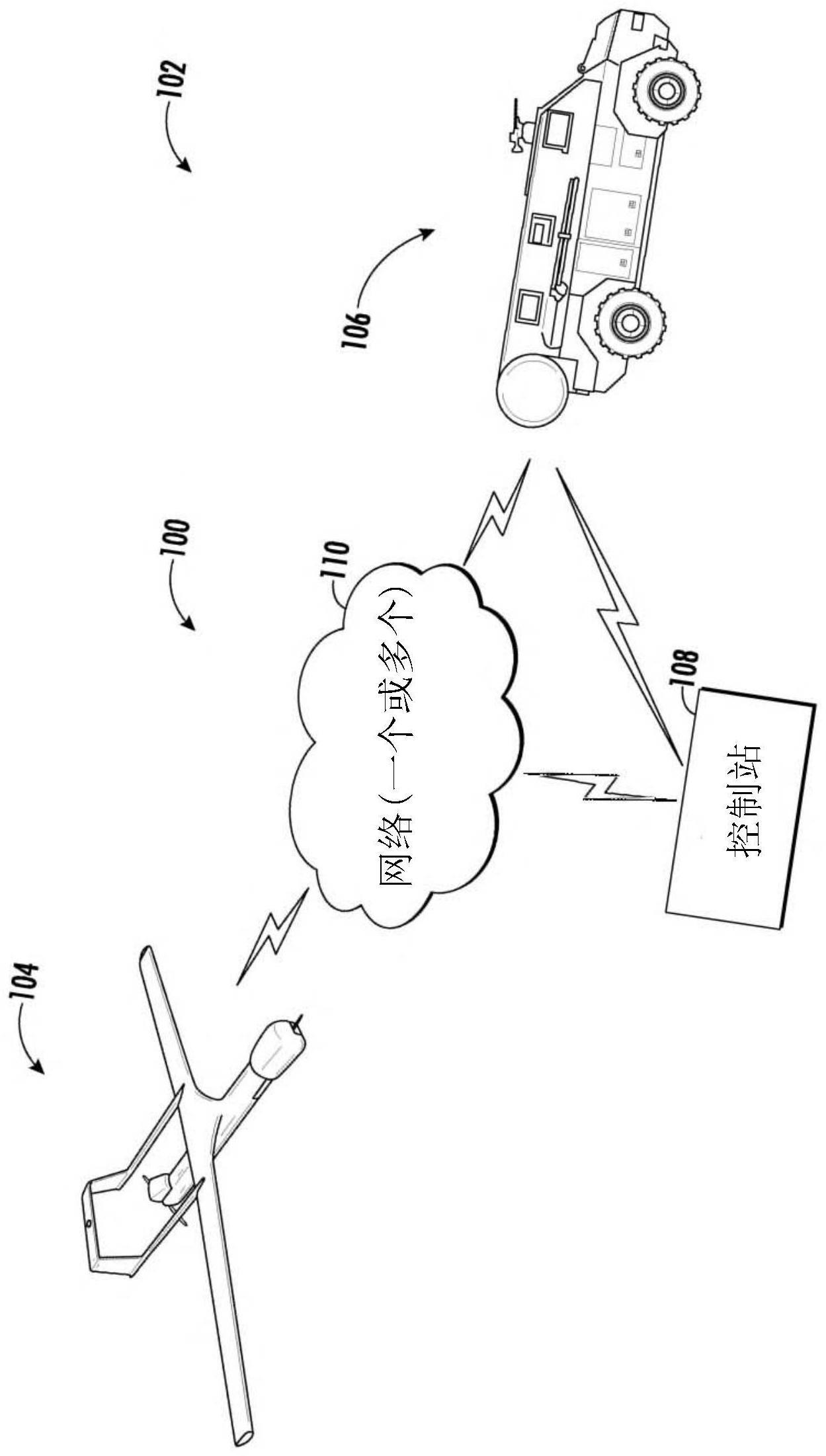
1、本公开内容的实例实施涉及地面交通工具通过陌生地形的路线规划。实例实施允许用户评估通过陌生地形的策略路线,并根据车队规格和任务优先级进行优化的路线规划。实例实施可以应用在许多不同的情况中,包括陌生的有争议的地形、不断变化的地形(诸如矿场和建筑工地)等。实例实施可以扩展到类似的场景,诸如逃离路线(避开特定区域或视线)和多目标路线(覆盖一组目标的最短路线)。利用频繁且高效的远程uav数据采集,实例实施可以快速提供通过区域的路线规划。这允许快速、准确和可靠地获取陌生的有争议的地形的信息,而这些信息以前在没有事先空中/地面侦察的情况下是无法获得的。
2、因此,本公开内容包括但不限于以下实例实施。
3、一些实例实施提供了一种用于支持一个或多个地面交通工具执行包括穿越地面区域的任务的设备,该设备包括:存储器,其配置为存储计算机可读程序代码;和处理电路,其配置为访问存储器,并执行计算机可读程序代码以致使设备至少:访问从地面区域的航空勘测产生的地理空间数据;执行地理空间数据的分析以产生根据多个地形度量描述地面区域的地形数据;基于一个或多个地面交通工具的约束,以及任务标准的优先级顺序,对地形数据进行加权;构建地面区域的地图,其中地面区域表示为加权的地形数据的地理空间映射阵列;在地图上搜索满足任务标准的路径,该路径由限定穿过地面区域的路线的一系列路点描述;并输出一个或多个地面交通工具在任务期间穿越的路线指示。
4、一些实例实施提供了支持一个或多个地面交通工具执行包括穿越地面区域的任务的方法,该方法包括:访问从地面区域的航空勘测产生的地理空间数据;执行地理空间数据的分析以产生根据多个地形度量描述地面区域的地形数据;基于一个或多个地面交通工具的约束,以及任务标准的优先级对地形数据进行加权;构建地面区域的地图,其中地面区域表示为加权的地形数据的地理空间映射阵列;在地图上搜索满足任务标准的路径,该路径由限定穿过地面区域的路线的一系列路点描述;并且输出一个或多个地面交通工具在任务期间穿越的路线的指示。
5、一些实例实现提供了一种计算机可读存储介质,其用于支持一个或多个地面交通工具执行包括穿越地面区域的任务,该计算机可读存储介质是非暂时性的并且具有存储在其中的计算机可读程序代码,响应于处理电路的执行,致使设备至少:访问从地面区域的航空勘测产生的地理空间数据;进行地理空间数据的分析以产生根据多个地形度量描述地面区域的地形数据;基于一个或多个地面交通工具的约束,以及任务标准的优先级,对地形数据进行加权;构建地面区域的地图,其中地面区域表示为加权的地形数据的地理空间映射阵列;在地图上搜索满足任务标准的路径,该路径由限定穿过地面区域的路线的一系列路点描述;并输出一个或多个地面交通工具在任务期间穿越的路线的指示。
6、通过阅读下面的详细描述连同在下文简要描述的附图,本公开内容的这些和其他特征、方面和优点将是显而易见的。本公开内容包括在本公开内容中阐述的两个、三个、四个或多个特征或要素的任何组合,无论这些特征或要素是否明确地组合或以其他方式在本文描述的特定实例实施中叙述。本公开内容旨在被整体地阅读,使得本公开内容的任何可分离特征或要素,在其任何方面和实例实施中,都应被视为可组合的,除非本公开内容的上下文另有明确规定。
7、因此将理解,提供此简要概述仅是为了总结一些实例实施的目的,以便提供对本公开内容的一些方面的基本理解。因此,应当理解,上述实例实施仅仅是实例并且不应被解释为以任何方式缩小本公开内容的范围或精神。从以下结合附图的详细描述中,其他实例实施、方面和优点将变得显而易见,这些附图以实例的方式示出了一些所描述的实例实施的原理。
技术特征:
1.一种用于支持一个或多个地面交通工具执行包括穿越地面区域的任务的设备(1400),所述设备包括:
2.根据权利要求1所述的设备(1400),其中在计划所述任务的活动期间访问(1302)所述地理空间数据,并且从与所述活动同时执行的航测勘测产生所述地理空间数据。
3.根据权利要求1所述的设备(1400),其中从所述地面区域的所述航空勘测产生的所述地理空间数据包括地理配准到所述地面区域并且在所述航空勘测期间收集的激光雷达数据的点云。
4.根据权利要求1所述的设备(1400),其中执行所述分析(1304)以产生根据所述多个地形度量描述所述地面区域的所述地形数据,所述多个地形度量包括海拔、粗糙度、坡度、植被密度或从兴趣点的视域中的多个。
5.根据权利要求1所述的设备(1400),其中所述地形数据包括用于所述多个地形度量中的相应地形度量的地形数据集,并且被致使对所述地形数据进行加权(1306)的所述设备包括被致使对所述地形数据集进行加权(1314)的所述设备,所述地形数据集中的不同地形数据集基于所述一个或多个地面交通工具的约束而不同地加权,并且
6.根据权利要求1-5中任一项所述的设备(1400),其中所述地理空间数据包括所述地面区域的光栅图像,所述光栅图像具有点阵数据结构,所述点阵数据结构具有所述地理空间数据的多层空间重合矩阵,并且对所述多层空间重合矩阵执行(1304)分析以产生所述地形数据,所述地形数据包括用于所述多个地形度量中的相应地形度量的地形数据集。
7.根据权利要求6所述的设备(1400),其中所述地形数据还具有所述点阵数据结构,所述点阵数据结构具有所述地形数据集中的相应地形数据集的第二多层第二空间重合矩阵,并且
8.根据权利要求1所述的设备(1400),其中被致使搜索(1310)所述地图的设备包括被致使搜索(1322)所述地图以根据所述优先级顺序找到最符合标准的所述路径的设备。
9.根据权利要求1所述的设备(1400),其中基于所述任务标准的所述优先级顺序对所述地形数据进行加权(1306),对于所述一个或多个地面交通工具,所述任务标准包括可通过性、速度、燃料效率、隐蔽性或无线通信范围中的多个。
10.一种支持一个或多个地面交通工具执行包括穿越地面区域的任务的方法(1300),所述方法包括:
11.根据权利要求10所述的方法(1300),其中在计划所述任务的活动期间访问(1302)所述地理空间数据,并且从与所述活动同时执行的所述航空勘测产生所述地理空间数据。
12.根据权利要求10所述的方法(1300),其中从所述地面区域的所述航空勘测产生的所述地理空间数据包括在所述航空勘测期间被地理配准到所述地面区域并收集的激光雷达数据的点云。
技术总结
本发明的名称为地面交通工具通过陌生地形的路线规划。提供了一种用于支持一个或多个地面交通工具执行包括穿越地面区域的任务的方法。该方法包括访问从地面区域的航空勘测产生的地理空间数据,并执行对地理空间数据的分析以产生描述地面区域的地形数据。基于一个或多个地面交通工具的约束以及任务标准的优先级顺序对地形数据进行加权。构建地图,其中地面区域表示为加权的地形数据的地理空间映射阵列,并且在地图上搜索满足任务标准的路径。路径由限定穿过地面区域的路线的一系列路点描述,并且输出路线指示以供一个或多个地面交通工具在任务期间穿越。
技术研发人员:K·A·阿姆斯特朗,A·P·兰卡斯特
受保护的技术使用者:英西图公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!