一种自主多样式干扰算法的制作方法
本发明涉及无人机干扰,具体为一种自主多样式干扰算法。
背景技术:
1、随着无人机技术的不断发展,其作战样式也从之前的单平台作战逐步转向可以适应复杂战场环境的多平台作战,即作战方式逐渐向“蜂群”方面发展。单架无人机性能单一,执行任务能力有限,而且难以完成多个任务,而通过无人机蜂群的方式,可以同时支配多架无人机,合作完成复杂的任务。因此,给无人机干扰防守提升了难度,传统的无人机防守通过单一雷达进行干扰,干扰范围有限,且一旦无人机较为分散的话,无法针对性加强信号进行干扰,需要人工判断,缺乏自主多样性。
技术实现思路
1、本发明的目的在于提供一种自主多样式干扰算法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种自主多样式干扰算法,包括:
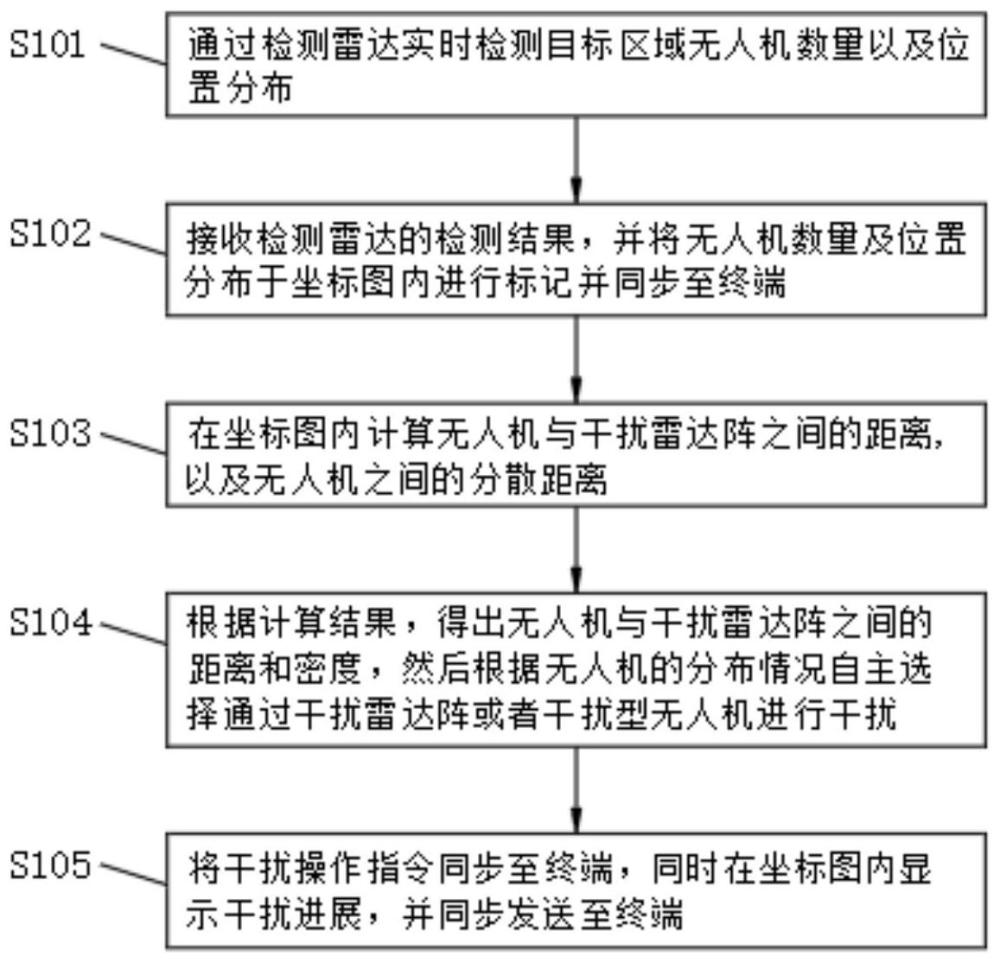
3、通过检测雷达实时检测目标区域无人机数量以及位置分布;
4、接收检测雷达的检测结果,并将无人机数量及位置分布于坐标图内进行标记并同步至终端;
5、在坐标图内计算无人机与干扰雷达阵之间的距离,以及无人机之间的分散距离;
6、根据计算结果,得出无人机与干扰雷达阵之间的距离和密度,然后根据无人机的分布情况自主选择通过干扰雷达阵或者干扰型无人机进行干扰;
7、将干扰操作指令同步至终端,同时在坐标图内显示干扰进展,并同步发送至终端。
8、优选的,所述通过检测雷达实时检测目标区域无人机数量以及位置分布,包括:
9、检测雷达通过天线把电磁波能量持续射向目标区域,目标区域若有无人机则反射碰到的电磁波,然后检测雷达天线接收此反射波,并持续将信号发送至信号接收处理器。
10、优选的,所述接收检测雷达的检测结果,并将无人机数量及位置分布于坐标图内进行标记并同步至终端,包括:
11、将信号接收处理器接收到的信号将无人机位置通过坐标图进行显示,并根据信号同步实时对无人机位置进行更新,同时将坐标图同步至终端。
12、优选的,所述在坐标图内计算无人机与干扰雷达阵之间的距离,以及无人机之间的分散距离,包括:
13、在坐标图内计算无人机与干扰雷达阵之间的距离l1\l2\……ln;
14、计算无人机相互之间的分散距离l1\l2\……ln。
15、优选的,所述根据计算结果,得出无人机与干扰雷达阵之间的距离和密度,然后根据无人机的分布情况自主选择通过干扰雷达阵或者干扰型无人机进行干扰,包括:
16、设定干扰雷达阵有效干扰距离为lx,干扰型无人机的有效干扰半径为lx/2;
17、对无人机与干扰雷达阵之间的距离进行判断,判断l1\l2\……ln中是否有大于lx的数,若没有,则开启干扰雷达阵对范围内无人机进行干扰,反之则继续下步骤;
18、对无人机之间的分散距离是否大于干扰型无人机的有效干扰半径进行判断,判断l1\l2\……ln中是否有大于lx/2的数,若没有,则派出一架干扰型无人机对相互距离小于lx/2的至少两个无人机进行干扰,并至少位于两个无人机的中点,反之,则派出干扰型无人机对相互距离大于lx/2的至少一个无人机进行一对一干扰。
19、优选的,所述干扰型无人机中安装有至少两个可转动的指向性信号干扰发射器,并根据目标范围内无人机的位置,在进行干扰工作时实时指向目标范围内的无人机。
20、优选的,所述干扰雷达阵的有效干扰距离小于检测雷达的检测范围,所述干扰型无人机可控范围小于或等于检测雷达的检测范围。
21、与现有技术相比,本发明的有益效果是:本发明通过设置自主多样式的干扰算法,对目标范围内的无人机与干扰雷达阵之间的距离及相互之间的密度进行判断,并根据不同的情况选择干扰模式,若无人机距离较近,则通过干扰雷达阵对其进行干扰,若距离较远,则通过干扰型无人机对其进行干扰,同时干扰型无人机还可对目标范围内的相互距离较近的多个无人机进行干扰,从而达到了快速响应,针对性干扰,干扰效果强等优点。
技术特征:
1.一种自主多样式干扰算法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种自主多样式干扰算法,其特征在于:所述通过检测雷达实时检测目标区域无人机数量以及位置分布,包括:
3.根据权利要求1所述的一种自主多样式干扰算法,其特征在于:所述接收检测雷达的检测结果,并将无人机数量及位置分布于坐标图内进行标记并同步至终端,包括:
4.根据权利要求1所述的一种自主多样式干扰算法,其特征在于:所述在坐标图内计算无人机与干扰雷达阵之间的距离,以及无人机之间的分散距离,包括:
5.根据权利要求1所述的一种自主多样式干扰算法,其特征在于:所述根据计算结果,得出无人机与干扰雷达阵之间的距离和密度,然后根据无人机的分布情况自主选择通过干扰雷达阵或者干扰型无人机进行干扰,包括:
6.根据权利要求1所述的一种自主多样式干扰算法,其特征在于:所述干扰型无人机中安装有至少两个可转动的指向性信号干扰发射器,并根据目标范围内无人机的位置,在进行干扰工作时实时指向目标范围内的无人机。
7.根据权利要求1所述的一种自主多样式干扰算法,其特征在于:所述干扰雷达阵的有效干扰距离小于检测雷达的检测范围,所述干扰型无人机可控范围小于或等于检测雷达的检测范围。
技术总结
本发明公开了一种自主多样式干扰算法,通过检测雷达实时检测目标区域无人机数量以及位置分布;接收检测雷达的检测结果,并将无人机数量及位置分布于坐标图内进行标记并同步至终端;在坐标图内计算无人机与干扰雷达阵之间的距离,以及无人机之间的分散距离。本发明的有益效果是:本发明实施例通过设置自主多样式的干扰算法,对目标范围内的无人机与干扰雷达阵之间的距离及相互之间的密度进行判断,并根据不同的情况选择干扰模式,若无人机距离较近,则通过干扰雷达阵对其进行干扰,若距离较远,则通过干扰型无人机对其进行干扰,从而达到了快速响应,针对性干扰,干扰效果强等优点。
技术研发人员:吴云松,刘捷,范晟淞
受保护的技术使用者:象骨(福州)科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!