一种基于大气偏振模式反对称性的偏振定向方法
本发明涉及现代信息图像处理及仿生导航,具体地说,是指一种基于大气偏振模式反对称性的偏振定向方法。
背景技术:
1、偏振光定向是一种受昆虫觅食行为启发而发展起来的导航方法。生物学研究成果表明,沙蚁、帝王蝶、蜜蜂等昆虫都可以通过感知天空中存在的大气偏振模式来进行自主定向。大气偏振模式是指太阳光在传输过程中由于大气粒子的散射作用而产生偏振光,在天空中形成的特定偏振态分布。通过提取大气偏振模式中的太阳子午线信息即可实现载体定向,与传统的卫星导航、惯性导航相比,仿生偏振定向方法不受电磁场干扰,也没有累积误差,在自主导航领域有着广泛的应用前景,因此得到了广泛研究。
2、然而,虽然基于大气偏振模式的定向方式具有精度高、续航时间长、自主性强的特点,但这种模式会因天气的不同而产生不同程度的失真。恶劣条件下,如厚云层、物体遮挡等导致成像视场中部分区域偏振信息无效,严重降低偏振定向精度甚至导致罗盘不可用。也正是这种对于天气条件的高度依赖限制了基于大气偏振光导航定向的应用。
技术实现思路
1、发明目的:为了解决现有技术中基于大气偏振模式的导航定向方法在复杂天气下定向失效的问题,本文提供了一种基于大气偏振模式反对称性的偏振定向方法。
2、技术方案:一种基于大气偏振模式反对称性的偏振定向方法,包括以下步骤:
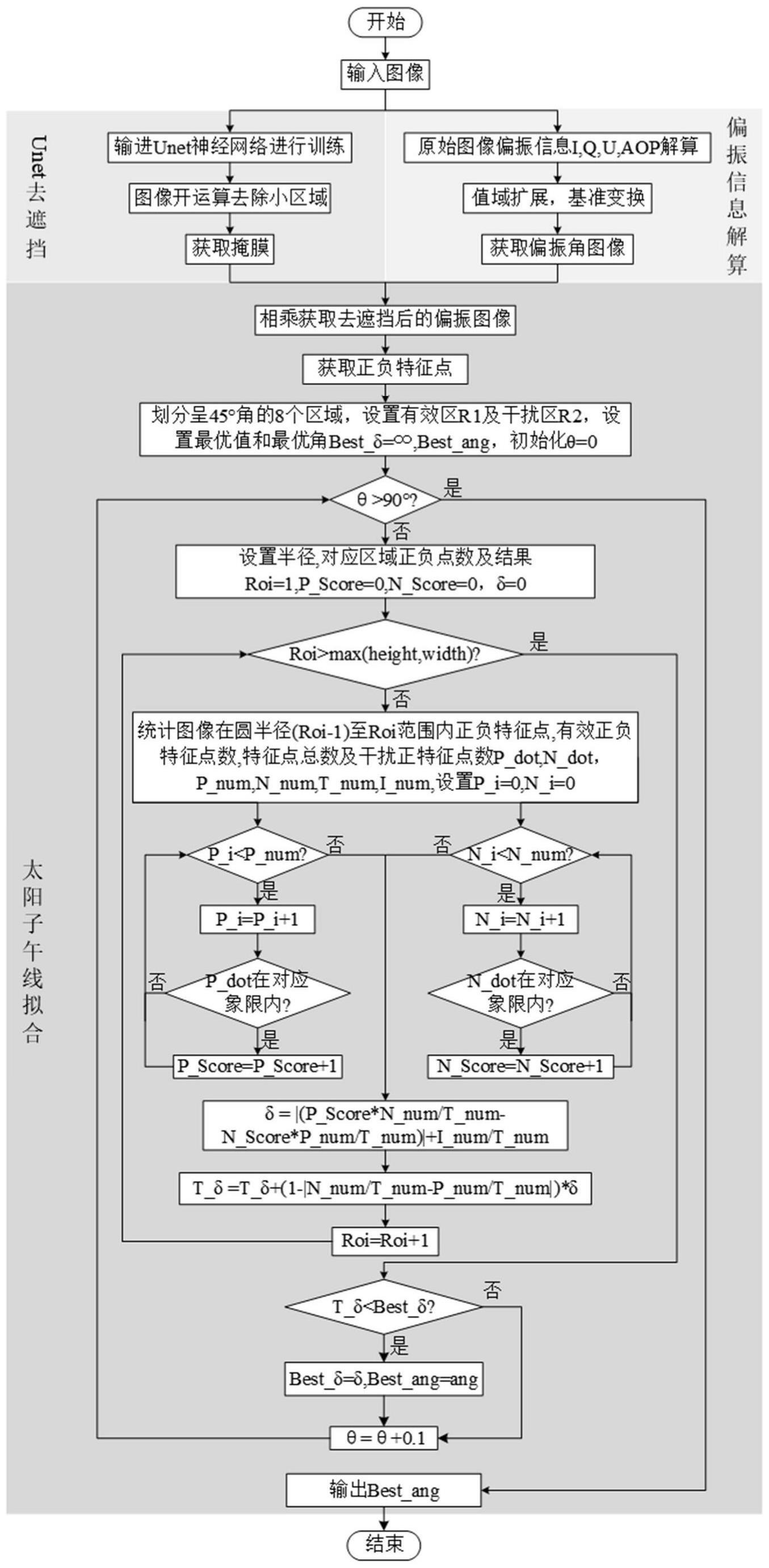
3、步骤一:利用偏振相机获取原始天空偏振图像,利用unet卷积神经网络对所述天空偏振图像进行二值分割,得到去遮挡后的天空偏振图像,并计算图像各像素点的偏振角;
4、步骤二:在去遮挡后的天空偏振图像中,以天顶点为圆心,随机设置轴线,轴线过圆点;
5、步骤三:以轴线为基准,每间隔45°划分一块区域,将天空划分为8个区域,分别命名为1~8区域,其中,1、4、5、8区域设为有效区,2、3、6、7区域设为干扰区;将天空偏振图像分离出多段等宽圆环,对于各圆环分别根据各像素点的偏振角统计以下参数:
6、圆环有效区域内的正特征点数p_num、负特征点数n_num及总特征点数t_num,1、5区域内的正特征点数p_score,4、8区域内的负特征点数n_score及干扰区内总特征点数i_num;
7、计算各圆环区域的δ值,并由各圆环区域的δ值计算总值δt;
8、
9、
10、
11、其中,wi为各圆环对应的权重;
12、步骤四:将轴线按照固定方向旋转角度θ,重复执行步骤三,计算总值;
13、步骤五:不断循环执行步骤四,直到轴线旋转一周,将所有总值进行比较,取总值最小时轴线所在位置,作为太阳子午线所在位置;
14、步骤六:利用载体所处位置及时间信息求出太阳位置,解算出绝对航向角。
15、进一步地,步骤一中,去遮挡后的天空偏振图像的获取方法为:
16、利用数据集对unet卷积神经网络进行训练,使用训练好的unet网络获取掩膜;
17、使用图像开运算对原始天空偏振图像进行预处理,去除原始天空偏振图像的异常小区域,得到预处理的天空偏振图像;
18、利用掩膜与预处理的天空偏振图像相乘,得到去遮挡后的天空偏振图像。
19、进一步地,步骤一中,利用斯托克斯公式计算图像各像素点的偏振角,具体为:
20、
21、其中,aop为图像各像素点的偏振角,i(0)、i(45)、i(90)、i(135)分别为像素点在0°、45°、90°、135°偏振方向强度值。
22、进一步地,步骤三中,总特征点包括正特征点和负特征点,特征点的获取方法为:
23、设置阈值α,进行偏振角值域拓展及基准变换,根据步骤一得到的aop值,筛选偏振角绝对值大于α的像素点作为特征点,其中,偏振角为正的像素点为正特征点,偏振角为负的像素点为负特征点。
24、进一步地,步骤一中,unet卷积神经网络的网络结构为四层下采样、四层上采样的u型结构。
25、进一步地,步骤六中,定义载体系下的太阳方位角导航系下的太阳方位角计算绝对航向角
26、θs=arcsin(sinδsinβ+cosδcosβcos t)
27、
28、其中,θs为太阳高度角,为太阳方位角,δ为观测点纬度,β为太阳赤纬角,t为太阳时角。
29、有益效果:与现有的偏振光定向方法相比,本发明提供的一种基于大气偏振模式反对称性的偏振定向方法,首先通过unet卷积神经网络对偏振图像进行二值分割,将图像中的厚云层/建筑物遮挡区域进行分离并去除,提升了大气偏振光定向时抗天气干扰的能力;接着利用大气偏振模式下偏振角分布沿太阳子午线反对称分布的特性进行太阳子午线拟合,实现了偏振光系统在复杂天气条件下的准确定向,使其即便是在复杂天气下,仍然可以有效实现大气偏振光定向,缓解大气偏振光定向时因天气影响而出现定向精度显著下降甚至失效的问题,突破了基于大气偏振光定向对天气条件高度依赖的限制,有效提高了偏振定向方法在复杂天气条件下的鲁棒性。
技术特征:
1.一种基于大气偏振模式反对称性的偏振定向方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于大气偏振模式反对称性的偏振定向方法,其特征在于,步骤一中,去遮挡后的天空偏振图像的获取方法为:
3.根据权利要求1或2所述的基于大气偏振模式反对称性的偏振定向方法,其特征在于,步骤一中,利用斯托克斯公式计算图像各像素点的偏振角,具体为:
4.根据权利要求3所述的基于大气偏振模式反对称性的偏振定向方法,其特征在于,步骤三中,总特征点包括正特征点和负特征点,特征点的获取方法为:
5.根据权利要求2所述的基于大气偏振模式反对称性的偏振定向方法,其特征在于,步骤一中,unet卷积神经网络的网络结构为四层下采样、四层上采样的u型结构。
6.根据权利要求1或2所述的基于大气偏振模式反对称性的偏振定向方法,其特征在于,步骤六中,定义载体系下的太阳方位角导航系下的太阳方位角计算绝对航向角
技术总结
本发明公开了一种基于大气偏振模式反对称性的偏振定向方法,首先通过UNet卷积神经网络对偏振相机获取的天空偏振图像进行二值分割,得到去遮挡后的天空偏振图像;接着以天顶点为圆心将分离出的天空分为多段圆环,分别求取环内对应的正负特征点;利用大气偏振模式的反对称性进行太阳子午线拟合,最终完成航向角解算。本发明解决了复杂天气尤其是大片遮挡导致的传统偏振定向方法失效的问题,有效提高了偏振定向方法在复杂天气条件下的鲁棒性。
技术研发人员:申冲,钱冠宇,刘万成,赵东花,曹慧亮,王晨光,唐军,刘俊
受保护的技术使用者:中北大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!