一种基于毫米波雷达的三维定位和身份识别方法与系统与流程
本发明涉及雷达监测,尤其涉及一种基于毫米波雷达的三维定位和身份识别方法与系统。
背景技术:
1、视觉定位是一种常用的定位技术,通过一个或多个摄像头采集固定在待定位物体上的发光体,从而确定该发光体的三维位置是视觉定位的一种技术手段。
2、但是,当存在多个定位物体或者多个发光体时,确定摄像头采集的图像中的发光点对实际中的发光体对应关系,是视觉定位中的一大难题,无法确定对应关系,就无法实现发光体,即待定位物体的身份识别。
3、现有的定位和身份识别设备主要依赖于面部识别、图像处理等技术,极易受到环境影响。
技术实现思路
1、本发明的目的在于提供一种基于毫米波雷达的三维定位和身份识别方法与系统,旨在解决现有定位和身份识别设备易受到环境影响的问题。
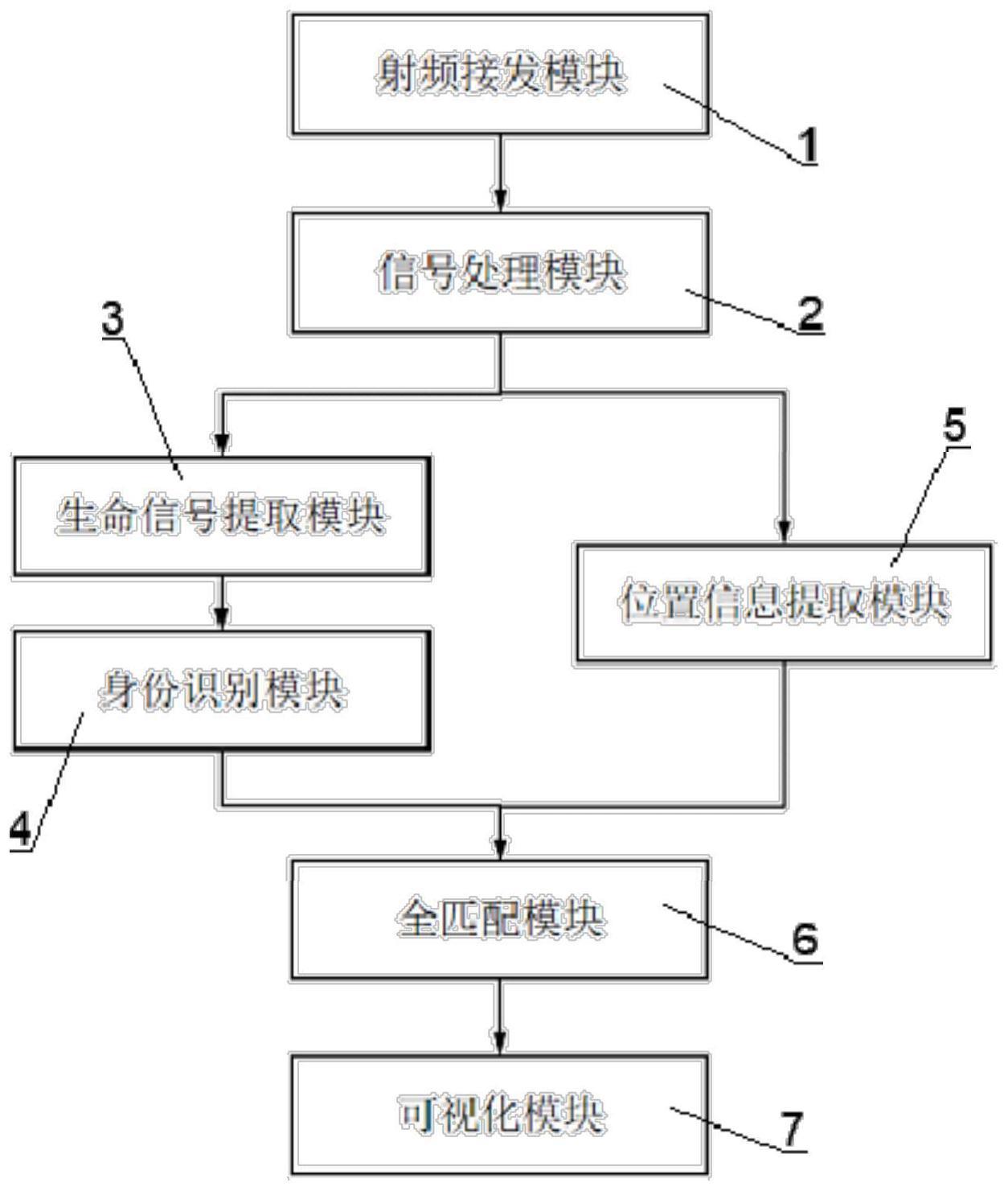
2、为实现上述目的,第一方面,本发明提供了一种基于毫米波雷达的三维定位和身份识别系统,包括射频接发模块、信号处理模块、生命信号提取模块、身份识别模块、位置信息提取模块、全匹配模块和可视化模块,所述信号处理模块分别与所述射频接发模块、所述生命信号提取模块和所述位置信息提取模块连接,所述身份识别模块与所述生命信号提取模块连接,所述全匹配模块分别与所述身份识别模块、所述位置信息提取模块和所述可视化模块连接;
3、所述射频接发模块,用于向待测对象发射毫米波级电磁信号,并接收所述待测对象反射的回波信号,得到原始雷达数据;
4、所述信号处理模块,用于对所述原始雷达数据进行预处理,生成正交信号;
5、所述生命信号提取模块,用于分解所述正交信号,实时提取呼吸信号和心率信号,得到波形微动特征;
6、所述身份识别模块,用于储存标准用户群的身份信息和生命体征信号的波形微动特征,并将所述待测对象的所述微动特征与标准用户群的所述微动特征进行对比识别,得到身份信息;
7、所述位置信息提取模块,用于对所述正交信号进行处理,计算出目标的距离与方位角,得到位置信息,并进行目标跟踪;
8、所述全匹配模块,用于将多个所述待测对象的所述身份信息与所述位置信息进行匹配;
9、所述可视化模块,用于实时显示所述待测对象的所述身份信息、生命体征具体数据与所述位置信息。
10、其中,所述的射频接发模块包括发射天线和接收天线。
11、其中,所述生命信号提取模块运作过程包括带通滤波、快速傅里叶变换、峰值遍历和微动特征提取。
12、其中,所述全匹配模块通过控制扫描范围,进行的身份信息与位置信息的逐个匹配过程只有一次,匹配完成后根据运动轨迹进行区分。
13、第二方面,本发明还提供一种基于毫米波雷达的三维定位和身份识别方法,包括以下步骤:
14、通过射频接发模块向待测对象发射毫米波级电磁信号,并接收所述待测对象反射的回波信号,得到原始雷达数据;
15、信号处理模块对所述原始雷达数据进行预处理,生成正交信号;
16、生命信号提取模块对所述正交信号进行分解,实时提取呼吸信号和心率信号,得到波形微动特征;
17、身份识别模块预先储存标准用户群的身份信息和生命体征信号的波形微动特征,并将所述待测对象的所述微动特征与标准用户群的所述微动特征进行对比识别,得到身份信息;
18、位置信息提取模块对所述正交信号进行处理,计算出目标的距离与方位角,得到位置信息,并进行目标跟踪;
19、全匹配模块将多个所述待测对象的身份信息与所述位置信息进行匹配;
20、可视化模块实时显示所述待测对象的所述身份信息、生命体征具体数据与所述位置信息。
21、本发明的一种基于毫米波雷达的三维定位和身份识别系统,通过所述射频接发模块向待测对象发射毫米波级电磁信号,并接收所述待测对象反射的回波信号,得到原始雷达数据,所述信号处理模块对所述原始雷达数据进行预处理,生成正交信号,包括信号放大处理和滤除杂波,生成i/q双通道的正交信号,再分别传输给生命信号提取模块和位置信息提取模块,所述生命信号提取模块对所述正交信号进行分解,实时提取呼吸信号和心率信号,得到波形微动特征,所述身份识别模块预先储存标准用户群的身份信息和生命体征信号的波形微动特征,并将所述待测对象的所述微动特征与标准用户群的所述微动特征进行对比识别,得到身份信息,所述位置信息提取模块对所述正交信号进行处理,计算出目标的距离与方位角,得到位置信息,并进行目标跟踪,所述全匹配模块将多个所述待测对象的身份信息与所述位置信息进行匹配,所述可视化模块实时显示所述待测对象的所述身份信息、生命体征具体数据与所述位置信息,该系统利用雷达对人员的身份识别与定位,不会受到环境影响,具有较高的准确性,解决现有定位和身份识别设备易受到环境影响的问题。
技术特征:
1.一种基于毫米波雷达的三维定位和身份识别系统,其特征在于,
2.如权利要求1所述的一种基于毫米波雷达的三维定位和身份识别系统,其特征在于,
3.如权利要求1所述的一种基于毫米波雷达的三维定位和身份识别系统,其特征在于,
4.如权利要求1所述的一种基于毫米波雷达的三维定位和身份识别系统,其特征在于,
5.一种基于毫米波雷达的三维定位和身份识别方法,应用于如权利要求1所述的一种基于毫米波雷达的三维定位和身份识别系统,其特征在于,包括以下步骤:
技术总结
本发明涉及雷达监测技术领域,具体涉及一种基于毫米波雷达的三维定位和身份识别方法与系统,包括射频接发模块、信号处理模块、生命信号提取模块、身份识别模块、位置信息提取模块、全匹配模块和可视化模块,射频接发模块面向待测对象发射雷达电磁信号,并接反射的回波信号,信号处理模块对原始雷达数据初步处理,生命信号提取模块提取出呼吸信号和心跳信号,身份识别模块调取标准用户群的微动特征进行匹配,识别待测对象身份,位置信息提取模块计算目标的距离和方位角,全匹配模块将待测对象的身份和位置进行匹配,并在可视化模块显示,该系统利用雷达对人员的身份识别与定位,不会受到环境影响,具有较高的准确性。
技术研发人员:罗钧议,陈仕熙,刘宇轩
受保护的技术使用者:成都灵睿奥创科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!