逆合成孔径雷达图像序列的三维重构方法、装置及介质
本发明涉及雷达,尤其是一种基于多任务深度学习的可解释性的逆合成孔径雷达图像序列的三维重构方法、计算机装置及存储介质。
背景技术:
1、逆合成孔径雷达(inverse synthetic aperture radar,isar)成像目前是在各个领域,尤其以军事和军工领域内是一种常用的雷达成像技术,isar最大的优势在于,利用雷达自身不动的特点,通过长时间观测目标,可以主动地、全天候、全天时地对空间目标进行观测、识别和跟踪。雷达通过发射一系列大时宽、大脉宽的电磁脉冲信号对空间目标进行长时间、大角度的持续观测,并对回波信号进行距离向的脉冲压缩和方位向的相干累积,从而得到观测目标的高分辨距离-多普勒图像。但是,通过上述方法得到的二维像,本质上只是空间目标的三维结构在成像平面的投影,仅仅从一张isar图像上是无法反应目标的三维结构,不利于后续空间目标的识别、追踪和分类。
技术实现思路
1、针对目前相关技术无法同时预测生物炭的修复土壤镉污染以及降低土壤甲烷排放等双重环保效果的技术问题,本发明的目的在于提供一种逆合成孔径雷达图像序列的三维重构方法、计算机装置及存储介质。
2、一方面,本发明实施例包括一种逆合成孔径雷达图像序列的三维重构方法,包括:
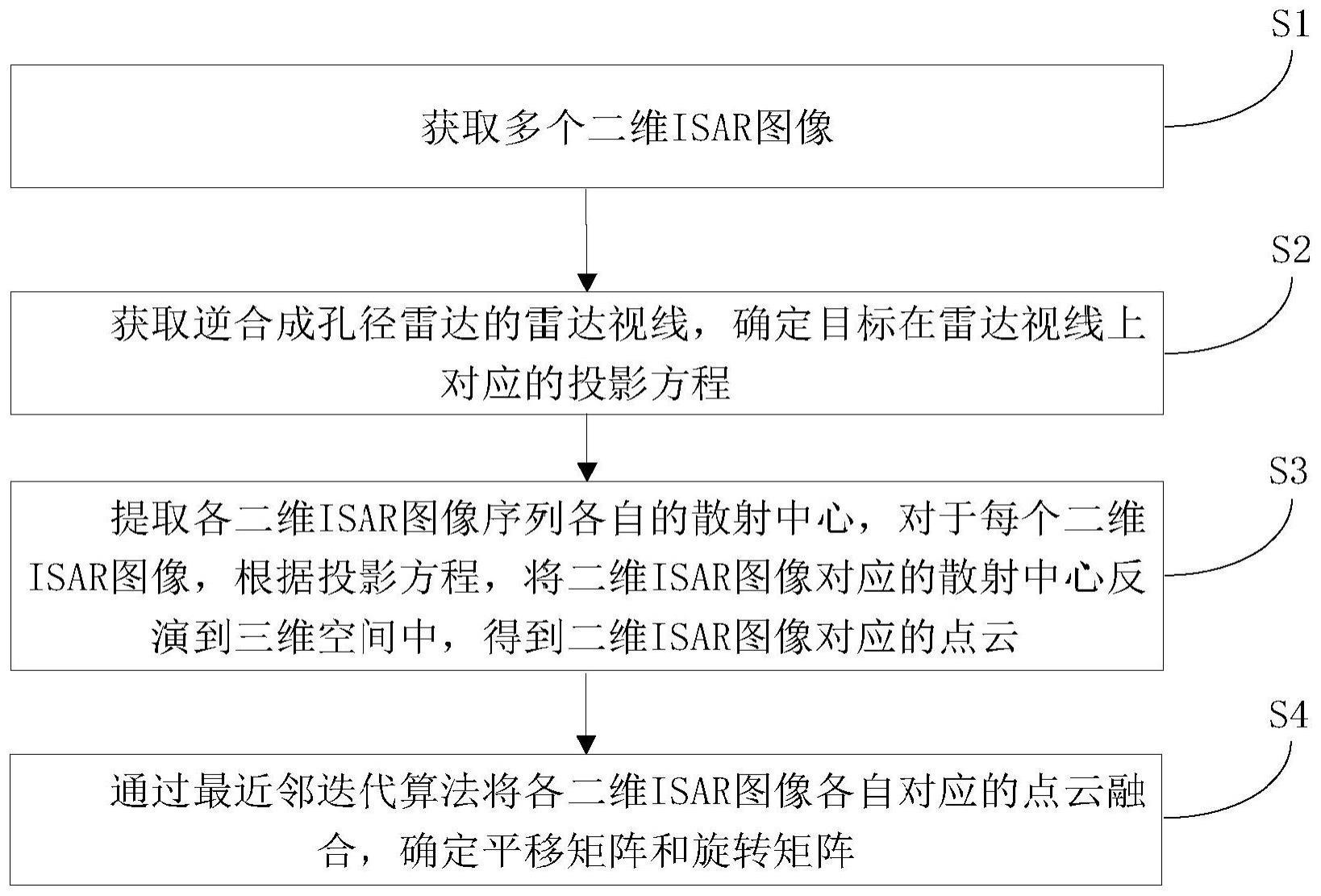
3、获取多个二维isar图像;
4、获取逆合成孔径雷达的雷达视线,确定目标在所述雷达视线上对应的投影方程;
5、提取各所述二维isar图像序列各自的散射中心,对于每个所述二维isar图像,根据所述投影方程,将所述二维isar图像对应的散射中心反演到三维空间中,得到所述二维isar图像对应的点云;
6、通过最近邻迭代算法将各所述二维isar图像各自对应的点云融合,确定平移矩阵和旋转矩阵。
7、进一步地,所述获取多个二维isar图像,包括:
8、通过所述逆合成孔径雷达接收目标回波;
9、对所述目标回波依次进行速度补偿、距离压缩、平动补偿和距离徙动矫正,从而获得多个所述二维isar图像。
10、进一步地,所述获取逆合成孔径雷达的雷达视线,包括:
11、建立空间目标轨道面坐标系o-xyz;其中,坐标轴oz指向地心,坐标轴ox在轨道平面内指向目标运动方向,坐标轴oy的方向根据右手定则确定;
12、建立雷达测量坐标系o-uvw,其中,坐标轴ou和坐标轴ov在同一水平面内,坐标轴ov指向正北方,坐标轴ow根据右手定则确定;
13、通过方程los=tc·ir=[cosθcosφ,sinθcosφ,sinφ]建立所述雷达视线,其中,tc表示所述雷达测量坐标系到所述空间目标轨道面坐标系的变换矩阵,ir表示所述雷达视线的测量值,θ表示所述逆合成孔径雷达的方位角信息,φ表示所述逆合成孔径雷达的俯仰角信息。
14、进一步地,所述确定目标在所述雷达视线上对应的投影方程,包括:
15、将所述逆合成孔径雷达在所述空间目标轨道面坐标系下的坐标表示为rr=[d·cosθcosφ,d·sinθcosφ,d·sinφ],其中,d为所述逆合成孔径雷达与目标转动中心的距离值;
16、对于目标上的任意一点pn=[xn,yn,zn],其中n表示点的序号,点pn在所述雷达视线上的投影表示为rn=pn-rr;
17、确定所述投影方程为其中,doppler表示多普勒向单位向量,表示所述逆合成孔径雷达的信号波长,表示所述空间目标三维坐标到isar二维成像平面的投影矩阵。
18、进一步地,所述通过最近邻迭代算法将各所述二维isar图像各自对应的点云融合,确定平移矩阵和旋转矩阵,包括:
19、执行多轮迭代过程;当执行完一轮所述迭代过程且不满足迭代终止条件,则执行下一轮迭代过程,当执行完一轮所述迭代过程且满足迭代终止条件,则结束执行全部所述迭代过程;
20、在每一轮所述迭代过程中:
21、设定损失函数其中,ps表示点云中的源点云,pt表示点云中的目标点云,t表示待求解的所述平移矩阵,r表示待求解的所述旋转矩阵;
22、根据公式进行损失函数最小化,确定所述平移矩阵t和旋转矩阵r的解值。
23、进一步地,所述根据公式进行损失函数最小化,确定所述平移矩阵t和旋转矩阵r的解值,包括:
24、通过公式确定所述平移矩阵t的解值;其中,n=|ps|。
25、进一步地,所述根据公式进行损失函数最小化,确定所述平移矩阵t和旋转矩阵r的解值,包括:
26、通过公式确定所述旋转矩阵r的解值;其中,v和u通过svd分解pttrps=∑vtru确定。
27、进一步地,所述迭代终止条件包括:
28、本轮所述迭代过程确定的所述平移矩阵t的解值和旋转矩阵r的解值分别小于各自对应的解值阈值;
29、或者
30、本轮所述迭代过程确定的损失函数小于损失阈值;
31、或者
32、执行的所述迭代过程的轮数累计达到轮数阈值。
33、另一方面,本发明实施例还包括一种计算机装置,包括存储器和处理器,所述存储器用于存储至少一个程序,所述处理器用于加载所述至少一个程序以执行实施例中的逆合成孔径雷达图像序列的三维重构方法。
34、另一方面,本发明实施例还包括一种存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于执行实施例中的逆合成孔径雷达图像序列的三维重构方法。
35、本发明的有益效果是:实施例中的逆合成孔径雷达图像序列的三维重构方法,将充分利用现有雷达对目标持续观测获取一系列高分辨二维isar像。通过雷达成像系统获得的isar图像序列,能够从中提取出观测目标所蕴含的三维信息。将雷达的观测信息和isar图像相结合,通过分析isar成像过程,其本质是三维目标在成像平面的投影。利用投影方程将从isar图像提取的散射中心投影反演到三维空间去,再通过点云融合的方法,将多角度的的点云信息融合起来最终完成对观测目标的三维重构,相较于传统的因子分解法,本发明跳过了散射中心匹配关联的过程,能够充分利用从isar图像提取的散射中心,避免提取的散射中心点的损失和关联匹配的错误,极大地提升了重构目标点云的稠密程度,获得三维结构清晰的目标图像。
技术特征:
1.一种逆合成孔径雷达图像序列的三维重构方法,其特征在于,所述逆合成孔径雷达图像序列的三维重构方法包括:
2.根据权利要求1所述的逆合成孔径雷达图像序列的三维重构方法,其特征在于,所述获取多个二维isar图像,包括:
3.根据权利要求1所述的逆合成孔径雷达图像序列的三维重构方法,其特征在于,所述获取逆合成孔径雷达的雷达视线,包括:
4.根据权利要求3所述的逆合成孔径雷达图像序列的三维重构方法,其特征在于,所述确定目标在所述雷达视线上对应的投影方程,包括:
5.根据权利要求1-4任一项所述的逆合成孔径雷达图像序列的三维重构方法,其特征在于,所述通过最近邻迭代算法将各所述二维isar图像各自对应的点云融合,确定平移矩阵和旋转矩阵,包括:
6.根据权利要求5所述的逆合成孔径雷达图像序列的三维重构方法,其特征在于,所述根据公式进行损失函数最小化,确定所述平移矩阵t和旋转矩阵r的解值,包括:
7.根据权利要求6所述的逆合成孔径雷达图像序列的三维重构方法,其特征在于,所述根据公式进行损失函数最小化,确定所述平移矩阵t和旋转矩阵r的解值,包括:
8.根据权利要求5所述的逆合成孔径雷达图像序列的三维重构方法,其特征在于,所述迭代终止条件包括:
9.一种计算机装置,其特征在于,包括存储器和处理器,所述存储器用于存储至少一个程序,所述处理器用于加载所述至少一个程序以执行权利要求1-8任一项所述的逆合成孔径雷达图像序列的三维重构方法。
10.一种计算机可读存储介质,其中存储有处理器可执行的程序,其特征在于,所述处理器可执行的程序在由处理器执行时用于执行权利要求1-8任一项所述的逆合成孔径雷达图像序列的三维重构方法。
技术总结
本发明公开了一种逆合成孔径雷达图像序列的三维重构方法、计算机装置及存储介质,三维重构方法包括获取多个二维ISAR图像,获取逆合成孔径雷达的雷达视线,确定目标在雷达视线上对应的投影方程,提取各二维ISAR图像序列各自的散射中心,将二维ISAR图像对应的散射中心反演到三维空间中,得到二维ISAR图像对应的点云,通过最近邻迭代算法将各二维ISAR图像各自对应的点云融合,确定平移矩阵和旋转矩阵等步骤。本发明能够从中提取出观测目标所蕴含的三维信息,能够充分利用从ISAR图像提取的散射中心,避免提取的散射中心点的损失和关联匹配的错误,极大地提升了重构目标点云的稠密程度。本发明广泛应用于雷达技术领域。
技术研发人员:田彪,王宇,李帅,贺婷婷,李建,徐世友,陈曾平
受保护的技术使用者:中山大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!