一种视觉与卫星导航联合的目标定位方法与流程
1.本发明涉及一种视觉与卫星导航导航联合的目标定位方法,该方法可以有效提高目标位置测定的效率,属于被动式目标定位领域。
背景技术:
2.卫星导航系统对载体自身位置的确定发挥着重要作用,随着各种增强技术的出现,定位精度也大幅提升。同时,通过布设2套卫星导航接收系统还可以实现载体方位角的确定,得到载体方向与真北的夹角。但是,依靠卫星导航系统只能得到导航终端自身所在位置的信息。
3.视觉技术仿照人类双眼来感知距离,通过两台参数相同,位置不同的摄像机代替人的双眼,对同一目标进行同步图像采集,通过比较目标在两幅图像中所在的位置差别,计算出目标的距离信息。但是,该技术仅能得到目标与观测点的距离,得不到目标的绝对位置信息。
4.因此,有必要结合视觉与卫星导航两个系统的功能,提出一种两者联合确定观测目标绝对位置信息的方法。但是,现有技术中还不存在这样的方案。
技术实现要素:
5.针对测定目标真实位置的问题,本发明提供一种视觉与卫星导航导航联合的目标定位方法,该方法为被动式的目标位置测定方法,其采用视觉与卫星导航的联合的定位方式,采用卫星导航确定观测点的绝对位置及朝向,采用视距观测在不主动发射电磁波的情况下,实现目标在坐标系中真实位置的测定。
6.本发明的目的是这样实现的:
7.一种视觉与卫星导航联合的目标定位方法,该方法通过主要由卫星导航接收机和双目摄像头组成的观测装置进行目标定位,卫星导航接收机的天线位于双目摄像头中两个摄像头基线的中心,观测装置上还设有电子罗盘;包括以下步骤:
8.(1)利用卫星导航接收机确定观测装置的绝对位置(xm,ym,zm);
9.(2)根据观测装置上的电子罗盘确定真北方向与当前双目摄像头法线的夹角α;
10.(3)根据卫星导航接收机的定位结果以及夹角α,计算两个摄像头光心的位置;设基线长度为d,则有:
11.z
l
=zm12.zr=zm13.其中,o
l
=(x
l
,y
l
,z
l
)为左侧摄像头的光心位置,or=(xr,yr,zr)为右侧摄像头的光心位置;
14.(4)提取目标在两个摄像头上的投影点,目标在左右两个摄像头中的投影点分别
定义为p
l
=(c
x
,cy),pr=(c'
x
,c'y);
15.(5)计算目标的当前位置坐标;若以左侧摄像头为参考基准,则目标的当前位置坐标(x0,y0,z0)为:
[0016][0017][0018][0019]
若以右侧摄像头为参考基准,则目标的当前位置坐标(x0,y0,z0)为:
[0020][0021][0022][0023]
其中,f为双目摄像头的焦距,t
x
为相机的外参。
[0024]
本发明的有益效果在于:
[0025]
1、本发明采用被动式的方式,不需要主动发射信号,可有效提高测定效率,增强了观测系统的隐蔽性,在侦察、目标定位方面具有很好的应用前景。
[0026]
2、本发明采用视觉与卫星导航联合的定位方式,在不主动发射电磁波的情况下,实现目标在坐标系中真实位置的测定,增强观测系统的隐蔽性,提高测定效率。
附图说明
[0027]
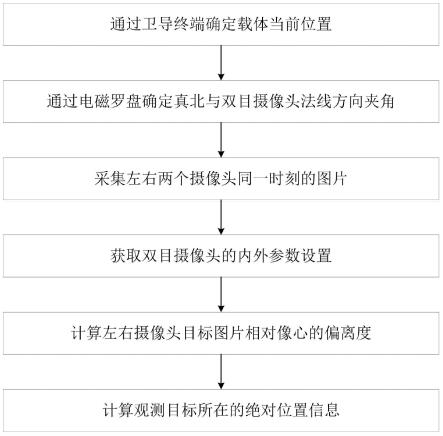
图1为本发明实施例中视觉与卫星导航联合的目标定位方法的流程图。
具体实施方式
[0028]
下面结合附图对本发明作更进一步的说明。
[0029]
如图1所示,一种视觉与卫星导航联合的目标定位方法,其通过主要由卫星导航接收机和双目摄像头组成的观测装置进行目标定位,卫星导航接收机的天线位于双目摄像头中两个摄像头基线的中心,观测装置上还设有电子罗盘;包括以下步骤:
[0030]
(1)利用卫星导航接收机确定观测装置的绝对位置(xm,ym,zm);
[0031]
(2)根据观测装置上的电子罗盘确定真北方向与当前双目摄像头法线的夹角α;
[0032]
(3)根据卫星导航接收机的定位结果以及夹角α,计算两个摄像头光心的位置;设基线长度为d,则有:
[0033]zl
=zm[0034]
zr=zm[0035]
其中,o
l
=(x
l
,y
l
,z
l
)为左侧摄像头的光心位置,or=(xr,yr,zr)为右侧摄像头的光心位置;z
l
=zr=zm是假设双目摄像头在同一个水平面上;
[0036]
(4)提取目标在两个摄像头上的投影点,目标在左右两个摄像头中的投影点分别定义为p
l
=(c
x
,cy),pr=(c'
x
,c'y);
[0037]
(5)计算目标的当前位置坐标;若以左侧摄像头为参考基准,则目标的当前位置坐标(x0,y0,z0)为:
[0038][0039][0040][0041]
若以右侧摄像头为参考基准,则目标的当前位置坐标(x0,y0,z0)为:
[0042][0043][0044][0045]
其中,f为双目摄像头的焦距,t
x
为相机的外参。
[0046]
进一步地,以左侧摄像头为参考基准,将载体的位置坐标代入可得:
[0047][0048][0049][0050]
总之,本发明方法利用双目摄像头,采用卫星导航终端和一个电磁罗盘实现对非合作目标位置的实时估计。该方法通过卫星导航终端得到载体当前位置坐标,通过电子罗
盘得到双目摄像头法线和真北方向的夹角,通过目标在两个摄像头上投影的偏离度、载体位置和与真北的夹角计算目标的当前位置。该方法具有实现简单、计算量小和成本低廉的特点,具有一定的推广价值。
技术特征:
1.一种视觉与卫星导航联合的目标定位方法,其特征在于,通过主要由卫星导航接收机和双目摄像头组成的观测装置进行目标定位,卫星导航接收机的天线位于双目摄像头中两个摄像头基线的中心,观测装置上还设有电子罗盘;包括以下步骤:(1)利用卫星导航接收机确定观测装置的绝对位置(x
m
,y
m
,z
m
);(2)根据观测装置上的电子罗盘确定真北方向与当前双目摄像头法线的夹角α;(3)根据卫星导航接收机的定位结果以及夹角α,计算两个摄像头光心的位置;设基线长度为d,则有:长度为d,则有:其中,o
l
=(x
l
,y
l
,z
l
)为左侧摄像头的光心位置,o
r
=(x
r
,y
r
,z
r
)为右侧摄像头的光心位置;(4)提取目标在两个摄像头上的投影点,目标在左右两个摄像头中的投影点分别定义为p
l
=(c
x
,c
y
),p
r
=(c'
x
,c'
y
);(5)计算目标的当前位置坐标;若以左侧摄像头为参考基准,则目标的当前位置坐标(x0,y0,z0)为:)为:)为:若以右侧摄像头为参考基准,则目标的当前位置坐标(x0,y0,z0)为:)为:)为:其中,f为双目摄像头的焦距,t
x
为相机的外参。
技术总结
本发明提出了一种视觉与卫星导航联合的目标定位方法,属于被动式目标定位领域。该方法利用双目摄像头,采用卫星导航终端和一个电磁罗盘实现对非合作目标位置的实时估计。该方法通过卫星导航终端得到载体当前位置坐标、通过电子罗盘得到双目摄像头法线和真北方向的夹角,通过目标在两个摄像头上投影的偏离度、载体位置和与真北的夹角计算目标的当前位置。该方法具有实现简单、计算量小和成本低廉的特点,具有一定的推广价值。具有一定的推广价值。具有一定的推广价值。
技术研发人员:解剑 范广伟 赵胜 解莹
受保护的技术使用者:中国电子科技集团公司第五十四研究所
技术研发日:2022.09.13
技术公布日:2022/12/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1