一种吊舱设备及测量方法与流程
发明属于吊舱,具体涉及一种吊舱设备及测量方法。
背景技术:
1、吊舱设备一般挂载在飞行器上,采用吊舱设备对目标进行跟踪识别是吊舱设备的一个重要功能。在对目标进行跟踪时,需要先选定跟踪目标,而在飞行速度较大且长焦下选定跟踪目标则是吊舱设备的必备性能。为了便于跟踪机动目标,一般来说,需要跟踪功能易于操作,图像平稳。
2、现有的设备的目标定位解算模块软件运行在单片机上,实时接收各测量单元上传的数据,定时对接收到的传感器数据进行目标定位解算。该方法中,使用最新接收到的传感器数据进行求解,由于各传感器的开机时刻、上传数据周期、网络延时等各不相同,导致定位解算模块每个解算周期使用的不同传感器数据的时间跨度增加,引入了系统误差。
技术实现思路
1、发明的目的在于提供一种吊舱设备及测量方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,发明提供如下技术方案:一种吊舱设备,包括
3、姿态测量单元;
4、二轴稳定平台,包括两个相互垂直的方位旋转运动轴,且均通过伺服电机驱动;
5、光栅编码器,检测关节角度位置;
6、图像采集单元,用于采集视野图像,从图像中识别目标,测量目标相对图像采集单元光轴的偏移角度;
7、测距单元,用于测量目标距离吊舱的距离;
8、数据处理单元。
9、优选的是,所述二轴稳定平台包括俯仰旋转运动轴和方位旋转运动轴,所述方位旋转运动轴与导航模组均安装在减振器上。
10、上述任一方案中优选的是,所述姿态测量单元设置为导航模组,实时提供吊舱基座的空间位置和空间姿态。
11、上述任一方案中优选的是,所述图像采集单元设置为可见光摄像机。
12、上述任一方案中优选的是,所述数据处理单元包括通信模块、目标定位解算模块、定时器模块。
13、上述任一方案中优选的是,光栅编码器包括稳定平台光栅编码器a和稳定平台光栅编码器b,所述稳定平台光栅编码器a设置在方位旋转运动轴上,所述稳定平台光栅编码器b设置在方位旋转运动轴俯仰旋转运动轴上。
14、上述任一方案中优选的是,所述测距单元设置为激光测距仪。
15、一种吊舱设备的测量方法,包括以下步骤:
16、s1:设定吊舱设备探测、识别的目标类型;
17、s2:可见光摄像机按照预设轨迹扫描环境;
18、s3:当从可见光摄像机拍摄的图像和视频中识别到目标后,根据目标在图像中心的偏移量,控制二轴稳定平台运动,使得可见光摄像机的光轴始终指向目标;
19、s4:开启激光测距仪的测距功能;
20、s5:数据处理单元接收各传感器上传的数据,对异步上传的数据进行插值,得到若干组时刻同步的传感器测量数据;
21、s6:根据各组同步时刻的传感器数据求解目标的位置。
22、上述任一方案中优选的是,在步骤s5中,所述数据插值的步骤如下:
23、(1)定义变量记录接收到的传感器数据和对应的接收时刻,用数组se[i]、t_se[i]表示,其中i=1,2,……;
24、(2)开启定时器模块中断,定义t[j],其中j=1,2,……,表示定时器模块的中断时刻;
25、(3)以t[j]为时间基准,对数组se[i]、t_se[i]进行插值,用数组syn_se[j]表示插值后得到的数据,具体的过程如下:
26、syn_se[j]=se[i+bias]+(se[i+bias+1]-se[i+bias])*(t[j]-t_se[i+bias])/(t_se[i+bias+1]-t_se[i+bias]),
27、式中,bias为一个新定义变量,其数据根据t[j]和t_se[i]确定,满足t_se[i+bias]<t[j]≤t_se[i+bias+1];
28、(4)根据以上步骤,对其他传感器上传的数据进行时间插值,获得以t[j]为时间基准的传感器数据。
29、上述任一方案中优选的是,在步骤s6中,所述求解目标位置的步骤如下:
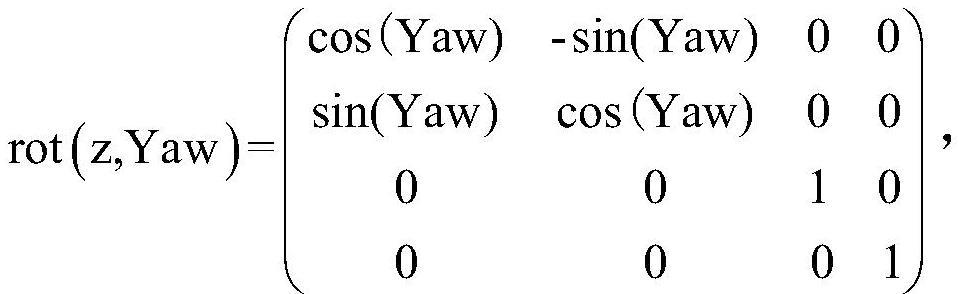
30、(1)导航模组检测吊舱安装基座的空间位置和姿态,即3个位移自由度和3个姿态自由度,分别用se、sn、su和yaw、pitch、roll表示,直接求解出基座相对于大地的位置,用t_base表示基座相对大地的位姿,写成4×4矩阵形式,则有
31、t_base=rot(z,yaw)*rot(y,pitch)*rot(x,roll)*trans(se,sn,su),
32、式中:
33、(2)稳定平台光栅编码器a、稳定平台光栅编码器b检测稳定平台的方位和俯仰旋转角度,分别用qa和qb表示,用a_plat_in_base表示稳定平台相对基座的位姿,用t_plat表示稳定平台相对大地的位姿,均写成4×4矩阵形式,则有
34、a_plat_in_base=rot(z,qa)*rot(y,qb),
35、t_plat=t_base*a_plat_in_base,
36、式中:
37、(3)用a_camera_in_plat表示摄像机坐标系相对稳定平台的位姿,用t_camera表示摄像机坐标系相对大地的位姿,写成4×4矩阵形式,则有
38、
39、t_camera=t_plat*a_camera_in_plat=t_base*a_plat_in_base*a_camera_in_plat
40、(4)当探测到目标、并对目标进行测距时,稳定平台将启动跟踪功能,使得目标的成像始终位于摄像机图像的中心位置,用l表示激光测距仪测量的目标距离,用a_target_in_camera表示目标相对于摄像机坐标系的位姿,用t_target表示目标相对大地的位姿,写成4×4矩阵形式,则有
41、a_target_in_camera=trans(0,0,l),
42、t_target==t_base*a_plat_in_base*a_camera_in_plat*a_target_in_camera,
43、式中,
44、发明的技术效果和优点:(1)本发明不增加硬件成本;
45、(2)不改变现有传感器内部程序、不需要对通用传感器提出定制化需求;
46、(3)在多传感器测量的方案,通过软件、算法提高数据同步性,提高目标位置测量的精度。
技术特征:
1.一种吊舱设备,其特征在于:包括
2.根据权利要求1所述的一种吊舱设备,其特征在于:所述二轴稳定平台包括俯仰旋转运动轴(5)和方位旋转运动轴(2),所述方位旋转运动轴(2)与导航模组(1)均安装在减振器(6)上。
3.根据权利要求1所述的一种吊舱设备,其特征在于:所述姿态测量单元设置为导航模组(1)。
4.根据权利要求1所述的一种吊舱设备,其特征在于:所述图像采集单元设置为可见光摄像机(4)。
5.根据权利要求1所述的一种吊舱设备,其特征在于:所述数据处理单元包括通信模块、目标定位解算模块、定时器模块。
6.根据权利要求2所述的一种吊舱设备,其特征在于:光栅编码器包括稳定平台光栅编码器a和稳定平台光栅编码器b,所述稳定平台光栅编码器a设置在方位旋转运动轴(2)上,所述稳定平台光栅编码器b设置在方位旋转运动轴俯仰旋转运动轴(5)上。
7.根据权利要求1所述的一种吊舱设备,其特征在于:所述测距单元设置为激光测距仪(3)。
8.一种根据权利要求1所述吊舱设备的测量方法,其特征在于:包括以下步骤:
9.根据权利要求8所述的一种吊舱设备的测量方法,其特征在于:在步骤s5中,所述数据插值的步骤如下:
10.根据权利要求8所述的一种吊舱设备的测量方法,其特征在于:在步骤s6中,所述求解目标位置的步骤如下:
技术总结
发明公开了一种吊舱设备,包括姿态测量单元、二轴稳定平台、光栅编码器、图像采集单元、测距单元、数据处理单元。包括测量方法:导航模组设定吊舱设备探测、识别的目标类型;可见光摄像机按照预设轨迹扫描环境;当从可见光摄像机拍摄的图像和视频中识别到目标后,根据目标在图像中心的偏移量,控制二轴稳定平台运动,使得可见光摄像机的光轴始终指向目标;开启激光测距仪的测距功能;数据处理单元接收各传感器上传的数据,对异步上传的数据进行插值,得到若干组时刻同步的传感器测量数据;根据各组同步时刻的传感器数据求解目标的位置。本发明不增加硬件成本;在多传感器测量的方案,通过软件、算法提高数据同步性,提高目标位置测量的精度。
技术研发人员:庄文许,董行,赵彦峰
受保护的技术使用者:南京卓宇智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!