用于组合检测物体的系统和方法与流程
本公开总体涉及用于检测和跟踪物体的车辆、系统和方法。
背景技术:
1、物体检测系统,也称为物体感测系统,在现代车辆中已经变得越来越普遍。物体检测系统可以向驾驶员提供关于车辆路径中的物体的警告。物体检测系统还可以向主动车辆安全系统提供输入,比如自适应巡航控制(acc),其控制车辆速度以保持与前方车辆的适当纵向间距。依靠物体检测和跟踪的其他主动安全特征包括碰撞即将制动(cib),当物体检测系统确定即将发生碰撞时,无需驾驶员输入即可制动。
2、物体检测系统使用一个或多个传感器,其可以是雷达、激光雷达、相机或其他技术,来检测主车辆的路径中或路径附近的物体的存在。软件用于跟踪物体在一段时间内的相对运动,确定物体是运动的还是静止的,确定每个物体可能是什么(另一车辆、行人、树等),并确定每个物体是否对主车辆构成碰撞威胁。
3、自主和半自主车辆能够感测它们的环境并基于感测的环境导航。这种车辆使用诸如雷达、激光雷达、图像传感器等感测设备来感测它们的环境。车辆系统还使用来自全球定位系统(gps)技术、导航系统、车对车通信、车对基础设施技术和/或线控系统的信息来导航车辆。
4、车辆自动化已被分类为数字级别,范围从零到五,零对应于完全人工控制的无自动化,五对应于没有人工控制的全自动化。各种自动化驾驶员辅助系统比如巡航控制、自适应巡航控制、车道保持控制和停车辅助系统对应于较低的自动化水平,而真正的“无人驾驶”车辆对应于较高的自动化水平。
5、已经发现,雷达物体检测系统可能错误地报告单个长车辆的两个雷达轨迹(报告了两个单独的物体),并且更靠前的雷达轨迹有时可能具有错误地撞击主车辆路径的运动向量。这可能导致主动安全特征被激活,比如高级制动辅助系统,而主动安全特征实际上不应被启用。
6、因此,期望提供确定物体何时被错误地报告为单独物体并避免基于这种错误报告激活主动安全特征的系统和方法。此外,结合附图和前述技术领域和背景技术,从随后的详细描述和所附权利要求中,本发明的其他期望特征和特性将变得显而易见。
技术实现思路
1、一方面,提供了一种控制车辆的主动安全特征的方法。该方法包括:经由至少一个处理器从车辆的雷达设备接收雷达数据;经由至少一个处理器从车辆的相机接收图像数据;经由至少一个处理器对雷达数据和图像数据执行物体检测和跟踪过程,以识别和跟踪车辆环境中的物体;以及经由至少一个处理器评估以下条件。通过物体检测和跟踪过程检测第一物体和第二物体。第一物体在纵向上位于第二物体前方基本恒定的距离处;并且物体检测和跟踪过程产生第一物体的雷达轨迹,而不产生第一物体的相机轨迹。当条件被评估为真时,经由至少一个处理器使用第二物体作为用于控制车辆的主动安全特征的输入,并且不考虑第一物体作为用于控制车辆的主动安全特征的输入。
2、在实施例中,条件还包括:物体检测和跟踪过程将第二物体分类为大型车辆类型。
3、在实施例中,条件还包括:物体检测和跟踪过程将第二物体识别为具有指定的最小宽度。
4、在实施例中,条件还包括:物体检测和跟踪过程确定与第二物体的纵向速度基本相同的第一物体的纵向速度。
5、在实施例中,条件还包括:物体检测和跟踪过程产生第二物体的雷达轨迹和相机轨迹。
6、在实施例中,条件还包括:第一物体在纵向上位于第二物体前方一设定距离内。
7、在实施例中,物体检测和跟踪过程包括使用深度学习算法的物体检测。
8、在实施例中,主动安全特征包括响应于由至少一个处理器预测的物体干扰车辆路径而改变车辆的运动。
9、在实施例中,运动改变受到制动、转向或推进控制的影响。
10、在实施例中,相机和雷达设备面向前方。
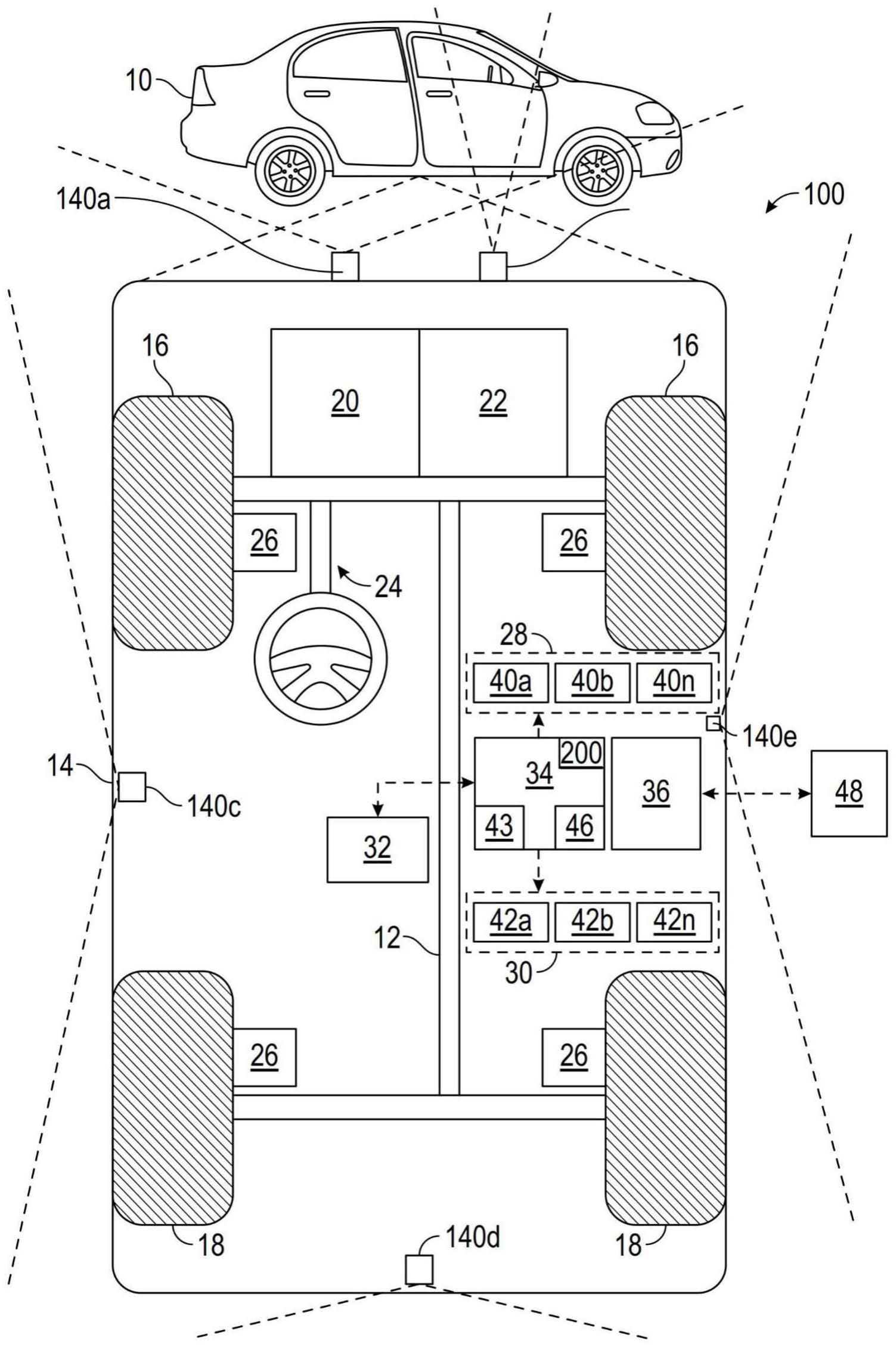
11、另一方面,提供了一种车辆。该车辆包括:主动安全系统、雷达设备、相机以及与主动安全系统、雷达设备和相机可操作通信的至少一个处理器。该至少一个处理器配置为执行程序指令。程序指令配置成使至少一个处理器:从车辆的雷达设备接收雷达数据,从车辆的相机接收图像数据,对雷达数据和图像数据执行物体检测和跟踪过程以识别和跟踪车辆环境中的物体,以及评估以下条件。通过物体检测和跟踪过程检测第一物体和第二物体;第一物体在纵向上位于第二物体前方基本恒定的距离处;物体检测和跟踪过程产生第一物体的雷达轨迹,而不产生第一物体的相机轨迹;并且当条件被评估为真时,使用第二物体作为用于控制车辆的主动安全特征的输入,并且不考虑第一物体作为用于控制车辆的主动安全特征的输入。
12、在实施例中,条件还包括:物体检测和跟踪过程将第二物体分类为大型车辆类型。
13、在实施例中,条件还包括:物体检测和跟踪过程将第二物体识别为具有指定的最小宽度。
14、在实施例中,条件还包括:物体检测和跟踪过程确定与第二物体的纵向速度基本相同的第一物体的纵向速度。
15、在实施例中,条件还包括:物体检测和跟踪过程产生第二物体的雷达轨迹和相机轨迹。
16、在实施例中,条件还包括:第一物体在纵向上位于第二物体前方一设定距离内。
17、在实施例中,物体检测和跟踪过程包括使用深度学习算法的物体检测。
18、在实施例中,主动安全特征包括响应于由至少一个处理器预测的物体干扰车辆路径而改变车辆的运动。
19、在实施例中,运动改变受到制动、转向或推进控制的影响。
20、在实施例中,相机和雷达设备面向前方。
技术特征:
1.一种控制车辆的主动安全特征的方法,该方法包括:
2.根据权利要求1所述的方法,其中,所述条件还包括:所述物体检测和跟踪过程将所述第二物体分类为大型车辆类型。
3.根据权利要求1所述的方法,其中,所述条件还包括:所述物体检测和跟踪过程将所述第二物体识别为具有指定的最小宽度。
4.根据权利要求1所述的方法,其中,所述条件还包括:所述物体检测和跟踪过程确定与所述第二物体的纵向速度基本相同的所述第一物体的纵向速度。
5.根据权利要求1所述的方法,其中,所述条件还包括:所述物体检测和跟踪过程产生所述第二物体的雷达轨迹和相机轨迹。
6.根据权利要求1所述的方法,其中,所述条件还包括:所述第一物体在纵向上位于所述第二物体前方一设定距离内。
7.根据权利要求1所述的方法,其中,所述物体检测和跟踪过程包括使用深度学习算法的物体检测。
8.根据权利要求1所述的方法,其中,所述主动安全特征包括响应于由所述至少一个处理器预测的物体干扰车辆路径而改变车辆的运动。
9.根据权利要求8所述的方法,其中,运动改变受制动、转向或推进控制的影响。
10.一种车辆,包括:
技术总结
提供了控制车辆的主动安全特征的系统和方法。该系统和方法从车辆的雷达设备接收雷达数据,并从车辆的相机接收图像数据。对雷达数据和图像数据执行物体检测和跟踪过程,以识别和跟踪车辆环境中的物体。针对所识别的物体评估条件,以确定雷达轨迹是否被错误地报告为相机轨迹的单独物体。当条件被评估为真时,对应于相机轨迹的物体用作用于控制车辆的主动安全特征的输入,并且对应于雷达轨迹的物体被排除用于控制车辆的主动安全特征。
技术研发人员:A.S.格鲁瓦尔,M.特罗特,I.里巴
受保护的技术使用者:通用汽车环球科技运作有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!