本发明涉及北斗定位,具体涉及一种适用于基础设施结构变形监测的北斗定位解算方法。
背景技术:
1、2007年,联合国将美国gps、中国北斗、俄罗斯格洛纳斯、欧盟伽利略确定为全球四大导航系统。北斗卫星导航系统是我国正在实施的自主发展、独立运行的全球卫星导航系统,以独立自主、开发兼容、技术先进、稳定可靠为目标。
2、基于北斗的高精度定位技术已经广泛运用于基础设施结构物(高层建筑、大坝、山体、桥梁、电塔等)的变形监测与安全运营领域。输电线路是电网的主动脉,特别是近年来超/特高压线路,大型电源送出线路,跨区联网线路等重要输电线路的快速建设,形成了电力输送的容量较大,分布较为集中的输电线路,这类输电线路发生异常,对网的影响也是否严重。电力铁塔的安全在电网中处于重要的位置,我国输电线路大多分布在山地和丘陵地区,很多电力设施建在地表不稳定区域,又因自然灾害和人为(如采矿生产,工程施工)等因素,造成电力铁塔倾倒和损坏的事故时有发生,造成重大的经济损失,是电网安全的重要隐患之一。因此,需要对开展对有安全隐患的电力铁塔进行预警监测和隐患处理工作,提升输电线路安全运行水平,提高重要输电通道灾害和人为破坏的监测能力。
3、该方案的基本思想是:在建筑上安装北斗信号天线和接收机终端,作北斗监测站点,实时接收北斗卫星信号。在另外一处(距离小于10km之内)观测环境较优的稳定固定位置安装另外一台北斗终端,作基准站点,实时接收北斗卫星信号。两台终端将采集的数据通过有线、无线传输等多种方式将数据传给数据平台。最后在电脑中通过数据处理算法获取北斗监测站点相对基准站点的三维位移变化。
4、然而该方案在实际应用中人就存在明显缺点:算法非常复杂,且缺乏灵活性,必须由专业人员进行实现、维护和升级。具有严重的时间延迟性,无法满足特殊基础设施形变监测对实时性的要求。传统的最小二乘算法为简易的线性算法,精确度无法达到要求。采用卡尔曼滤波算法来计算位置信息,还存在接收机误差、卫星时钟误差、电离层时延误差、大气对流层时延误差和伪距测量噪声误差。
技术实现思路
1、有鉴于此,本发明提供了一种基于北斗定位的输电铁塔结构形变监测评估解算算法,算法简单灵活、时间实时性好、降低了各种误差对计算结果的影响,实现了对建筑物更加精准地位置定位。
2、一种基于北斗定位的输电铁塔结构形变监测评估解算算法,该算法实现的步骤如下:
3、步骤一:通过求解四元非线性方程组获得伪距观测方程;
4、步骤二:对伪距观测方程线性化,组建双差观测方程,获取式中状态转移矩阵和系统噪声向量;
5、步骤三:由标准卡尔曼滤波方法获取当前状态估计值;
6、步骤四:根据实际情况对预报向量进行误差补偿修正。
7、进一步地,所述步骤一中求解四元非线性方程组获得伪距观测方程的过程如下:
8、定位算法的本质就是求解如下一个四元非线性方程组:
9、
10、其中:n为该观测历元可见卫星数,其中x=[x,y,z]t为未知的接收机坐标向量,x(n)=[x(n),y(n),z(n)]t为卫星n的接收机坐标向量,为卫星时钟钟差,为定义修正后的伪距测量值;
11、伪距观测方程可以写成下式:
12、
13、其中,n=1,2,n为卫星号,ρ(n)为伪距测量值,r(n)为卫星位置与接收机之间的直线距离,δtu为接收机钟差,δt(n)为买星时钟钟差,i(n)为大气电离层时延误差,t(n)为大气对流层时延误差,为伪距测量噪声量。
14、进一步地,所述步骤二中组建双差观测方程,获取式中状态转移矩阵和系统噪声向量的过程如下:
15、双差观测方程如下:
16、xk=φk,k-1xk-1+wk
17、lk=akxk+vk
18、其中,xk是系统在当前时刻的状态向量;φk,k-1为从t(t-1)时刻到t(t)时刻系统状态的状态转移矩阵;wk为系统噪声向量;lk是系统在t(t)时刻的观测量;ak为观测方程的观测矩阵,vk为残差。
19、进一步地,所述步骤三中获取当前状态估计值的过程如下:
20、残差表示为:
21、vk=akxk-lk
22、增益矩阵kk表示为:
23、
24、当前状态估计值表示为:
25、
26、进一步地,所述步骤四对预报向量进行误差补偿修正的过程如下:
27、定义误差向量为δer,误差表示为多维输入和输出的非线性映射:
28、
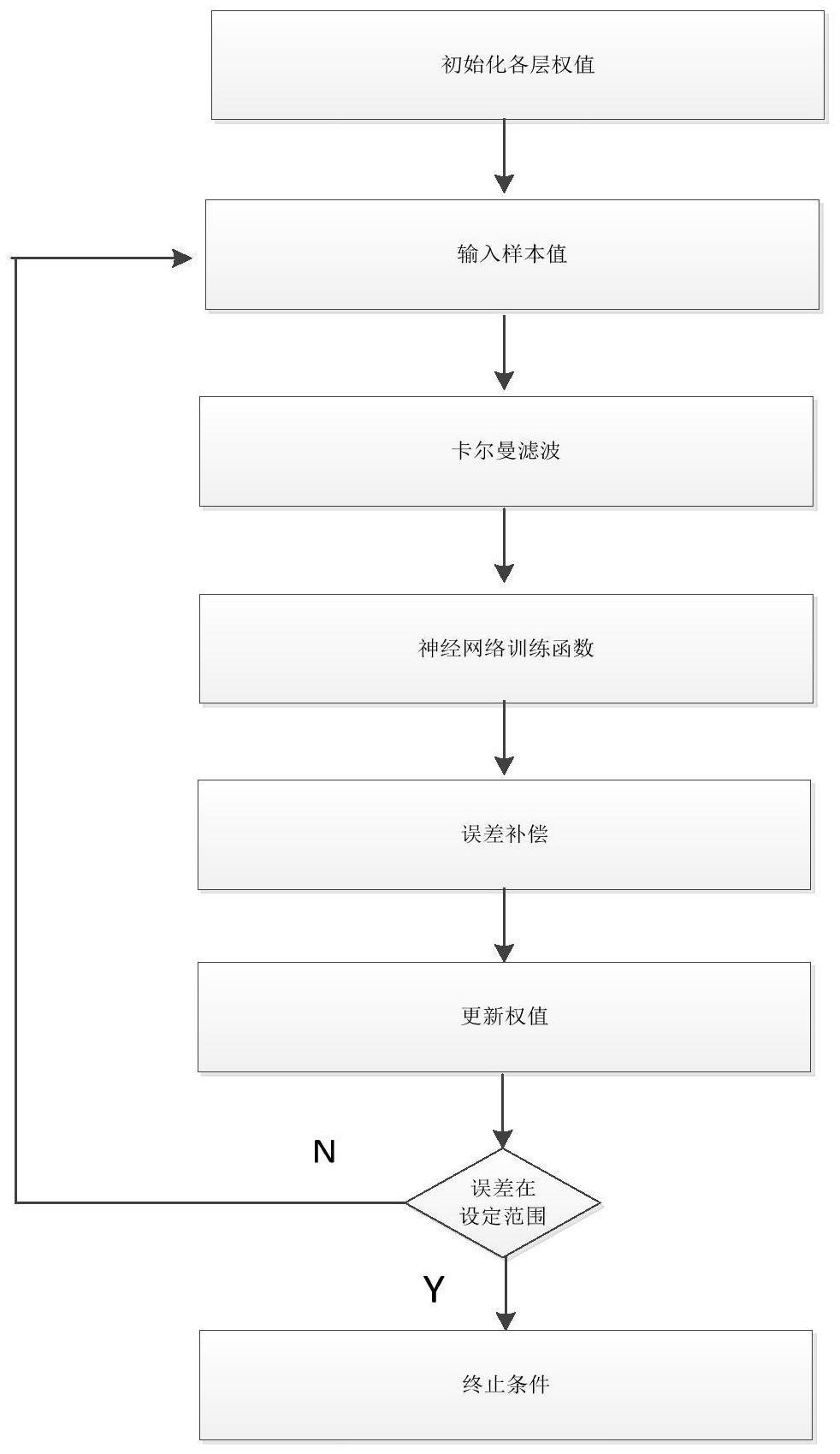
29、利用神经网络的方法,通过训练逼近非线性映射f,学习出与误差补偿向量之间的关系,在网络预测阶段,预测出误差补偿向量,进而对动力学模型进行补偿。考虑实际应用中误差的影响,当前状态估计值修正为:
30、
31、其中,i为单位矩阵,误差的来源主要为kk和采用神经网络训练出函数f,实现误差的反向传播,不断调整和更新输入样本值的权值和偏置。
32、有益效果:
33、1、本发明针对标准卡尔曼滤波存在的问题,提出了基于神经网络的动力学模型补偿算法。针对动力学模型的异常扰动,通过神经网络学习卡尔曼滤波增益和新息的乘积与动力学模型的关系,在预测阶段对动力学模型误差进行补偿,能够提高定位精度。
34、2、本发明采用站间差分模式,则通过监测站、基准站两个站点解析的北斗观测数据进行组合,并结合两站的初始坐标(x、y、z)形成残差。其观测矩阵则是通过站星之间的单位方位角组合而成。在完成状态方程、双差观测方程组建之后,采用卡尔曼滤波的方法,通过一次求解即可完成坐标参数的更新和估计,由于kalman滤波是个实时滤波器,其北斗坐标的更新可以实现实时求解,提升了监测结果的实时性。
35、3、本发明通过数学建模分析初始数据,进而采用传统的卡尔曼滤波的方法建立相关方程,并获得重要的参数,最后结合北斗信号传输过程中各种误差的影响,提出了基于神经网络修正误差的北斗位置解算方法,实现了对建筑物更加精准地位置定位。
技术特征:1.一种基于北斗定位的输电铁塔结构形变监测评估解算算法,其特征在于,该算法实现的步骤如下:
2.如权利要求1所述的基于北斗定位的输电铁塔结构形变监测评估解算算法,其特征在于,所述步骤一中求解四元非线性方程组获得伪距观测方程的过程如下:
3.如权利要求2所述的基于北斗定位的输电铁塔结构形变监测评估解算算法,其特征在于,所述步骤二中组建双差观测方程,获取式中状态转移矩阵和系统噪声向量的过程如下:
4.如权利要求1所述的基于北斗定位的输电铁塔结构形变监测评估解算算法,其特征在于,所述步骤三中获取当前状态估计值的过程如下:
5.如权利要求3或4所述的基于北斗定位的输电铁塔结构形变监测评估解算算法,其特征在于,所述步骤四对预报向量进行误差补偿修正的过程如下:
技术总结本发明公开了一种基于北斗的输电铁塔结构形变监测评估解算算法,属于北斗定位技术领域。该算法实现的步骤如下:步骤一:通过求解四元非线性方程组获得伪距观测方程;步骤二:对伪距观测方程线性化,组建双差观测方程,获取式中状态转移矩阵和系统噪声向量;步骤三:由标准卡尔曼滤波方法获取当前状态估计值;步骤四:根据实际情况对预报向量进行误差补偿修正。本发明的算法简单灵活、时间实时性好、降低了各种误差对计算结果的影响,实现了对建筑物更加精准地位置定位。
技术研发人员:王宠,阎毓杰,李乐,李昂,乔晓静
受保护的技术使用者:中国船舶重工集团公司第七一九研究所
技术研发日:技术公布日:2024/1/12