一种架桥机轨道平行度检测方法与流程
1.本发明涉及架桥机轨道平行度检测技术领域,尤其涉及一种架桥机轨道平行度检测方法。
背景技术:
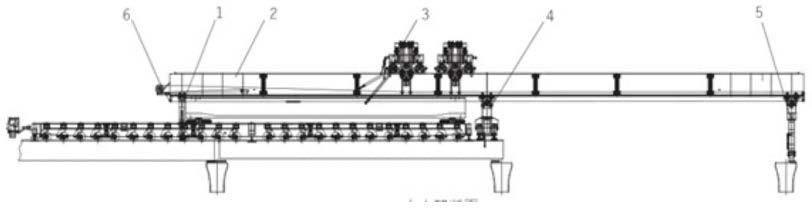
2.架桥机在基础工程建设中是广泛应用的大型设施,在架梁过程中使用,实际运行时,过孔后架桥机应保持前高后低,且前腿轨道和后腿轨道应保持水平,同时误差不能大于10cm,否则会出现失稳而引起侧翻发生。如图1所示,即为一种架桥机结构示意图,架桥机包括后支腿1、机臂2、起重小车3、中支腿4、前支腿5以及卷扬拖拉机构6。
3.目前,架桥机的运行主要依靠架桥机安全监控系统进行实时监测。但是目前的监测系统主要是对传感器的实时采集和显示,主要包括起吊重量,起吊高度,位移距离,水平角度,垂直角度等,并没有对轨道平行度误差的监测,因此,如何监测架桥机前支腿和中支腿平行度,从而确保架桥机安全运行是一个亟待解决的问题。
技术实现要素:
4.针对现有技术中所存在的不足,本发明提供了一种架桥机轨道平行度检测方法,其解决了现有技术中缺少对架桥机前支腿和中支腿平行度进行检测的方法的问题。
5.根据本发明的实施例,一种架桥机轨道平行度检测方法,其通过北斗定位系统分别获取架桥机轨道上四个定位点的位置信息,根据四个定位点的位置信息得到空间向量,计算向量的点积和叉积,若两个向量的点积为0,则两向量相互垂直,若两个向量的叉积为则两个向量相互平行。
6.上述实施例中,通过两个向量的点积以及叉积,可以得到向量是否垂直或平行,从而判断四个定位点是否为共面,共面则处于平行状态,否则则出现了偏移,偏移程度可以通过设置点积和叉积的误差范围,在范围内判断为处于平行状态,超过则判断为出现偏移,从而解决了现有技术中缺少对架桥机前支腿和中支腿平行度进行检测的方法的问题。
7.进一步地,位置信息包括经度、纬度和海拔。
8.进一步地,四个定位点上分别安装有与北斗定位系统通信的四个gnss天线。
9.进一步地,四个定位点分别为:前左a(a1,b1,c1),前右b(a2,b2,c2),中左c(a3,b3,c3),中右d(a4,b4,c4),计其中三个定位点所在平面s的法向量为以前左a(0,0,0)为原点,若第四个定位点与平面s不共面,第四点与平面s之间的距离为d,
10.其中,为平面s上任意一点到该点的向量。
11.相比于现有技术,本发明具有如下有益效果:
12.采用北斗定位技术获取四个定位点的位置信息后通过向量的点积和叉积计算即
可判断架桥机前支腿和中支腿平行度,简单快捷,从而确保了架桥机能够具有更好的稳定性。
附图说明
13.图1为现有技术中的架桥机结构示意图;
14.图2为本发明实施例的北斗定位系统示意图;
15.图3为本发明实施例的四个定位点位置示意图;
16.上述附图中:
17.后支腿1、机臂2、起重小车3、中支腿4、前支腿5、卷扬拖拉机构6。
具体实施方式
18.下面结合附图及实施例对本发明中的技术方案进一步说明。
19.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
20.如图1至3所示,本实施例提供了一种架桥机轨道平行度检测方法,其通过北斗定位系统(图2所示)分别获取架桥机轨道上四个定位点的位置信息(位置信息包括经度、纬度和海拔),四个定位点分别为:前左a(a1,b1,c1),前右b(a2,b2,c2),中左c(a3,b3,c3),中右d(a4,b4,c4),根据四个定位点的位置信息得到空间向量,分别为:
[0021][0022][0023][0024][0025]
计算向量的点积和叉积,若两个向量的点积为0,则两向量相互垂直,若两个向量的叉积为则两个向量相互平行。
[0026]
具体地,我们设置a点为坐标原点a(0,0,0),通过经纬度坐标和海拔,我们可以计算出以及各个向量相对于正北方向的方向角;选取正北方向为y轴,正东方向为x轴,天向为z轴,我们可以计算出a、b、c、d各个点的坐标值,进而可以计算出各个向量的坐标。
[0027]
根据向量理论知识,向量的乘积分为点积和叉积,分别记作:
[0028][0029][0030][0031]
由此可知,若两个向量的点积等于0,那么说明这两个向量互相垂直;若两个向量的叉积等于那么说明两个向量互相平行。
[0032]
通过两个向量的点积以及叉积,可以得到向量是否垂直或平行,从而判断四个定位点是否为共面,共面则处于平行状态,否则则出现了偏移,偏移程度可以通过设置点积和叉积的误差范围,在范围内判断为处于平行状态(即四个定位点共面),超过则判断为出现偏移,从而解决了现有技术中缺少对架桥机前支腿和中支腿平行度进行检测的方法的问题。
[0033]
进一步地,还可以计算这四个定位点分别到对向两个向量的垂直距离;
[0034]
具体地,给定直线l,其方向向量为a为l外一点,若要求a到直线l的距离d,可任取l上一点b,点a到点b的向量记作则
[0035][0036]
根据向量叉积的特性,可以计算出其中任意三个定位点构成的平面s的法向量若四个定位点不在同一个平面s之内,还可以计算出剩下的不在同一个平面s上的点到该平面的距离d,计算方法为取平面s上任意一点到该点取向量则
[0037][0038]
本发明具有如下有益效果:
[0039]
1、精度高,数据刷新率快,能更快更准确的反映架桥机运行的方位状态;
[0040]
2、安装方便,只需要在架桥机选取四个定位点,在四个定位点处固定好gnss天线即可,布线少,数据采用无线传输;
[0041]
3、成本低,整个系统只需要两块支持rtk解算的北斗定位板卡,加上上位机运算控制模块及无线数传模块;
[0042]
4、采用最先进的高精度北斗定位技术,稳定性好。
[0043]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较
佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
技术特征:
1.一种架桥机轨道平行度检测方法,其特征在于,通过北斗定位系统分别获取架桥机轨道上四个定位点的位置信息,根据四个定位点的位置信息得到空间向量,计算向量的点积和叉积,若两个向量的点积为0,则两向量相互垂直,若两个向量的叉积为则两个向量相互平行。2.如权利要求1所述的架桥机轨道平行度检测方法,其特征在于,位置信息包括经度、纬度和海拔。3.如权利要求1所述的架桥机轨道平行度检测方法,其特征在于,四个定位点上分别安装有与北斗定位系统通信的四个gnss天线。4.如权利要求2所述的架桥机轨道平行度检测方法,其特征在于,四个定位点分别为:前左a(a1,b1,c1),前右b(a2,b2,c2),中左c(a3,b3,c3),中右d(a4,b4,c4),计其中三个定位点所在平面s的法向量为以前左a(0,0,0)为原点,若第四个定位点与平面s不共面,第四点与平面s之间的距离为d,其中,为平面上任意一点到该点的向量。
技术总结
本发明提供了一种架桥机轨道平行度检测方法,其通过北斗定位系统分别获取架桥机轨道上四个定位点的位置信息,根据四个定位点的位置信息得到空间向量,计算向量的点积和叉积,若两个向量的点积为0,则两向量相互垂直,若两个向量的叉积为则两个向量相互平行。本发明解决了现有技术中缺少对架桥机前支腿和中支腿平行度进行检测的方法的问题。支腿平行度进行检测的方法的问题。支腿平行度进行检测的方法的问题。
技术研发人员:高钰敏 聂道静 孙翠翠 李巍 许国庆 谢邦天 朱文达 林仲晨 蔡小雨
受保护的技术使用者:微特技术有限公司
技术研发日:2022.10.31
技术公布日:2023/2/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1