一种多船协同定位控制方法、系统、电子设备及存储介质与流程
本发明涉及长基线声学定位,特别是涉及一种多船协同定位控制方法、系统、电子设备及存储介质。
背景技术:
1、随着陆上油气地震勘探中“两宽一高”技术的不断完善成熟,该技术向海上油气勘探推广成为趋势,大量的大规模、大面积的海底地震勘探成为勘探市场的主角,投入的设备、资源数量不断刷新,基于长基线的声学定位方法是获得海底检波器(节点)位置最常用的手段,当投入的定位船舶数量过多时,受到声学信号的特性影响,多船协同定位受到探测范围的制约,不利于资源的高效利用及生产效率。
技术实现思路
1、有鉴于此,本发明提供一种多船协同定位控制方法、系统、电子设备及存储介质。旨在实现在小范围内多定位船协同高效作业,实现声学定位船设备的最大化利用和提升作业效率。
2、本发明提供的一种多船协同定位控制方法,包括:
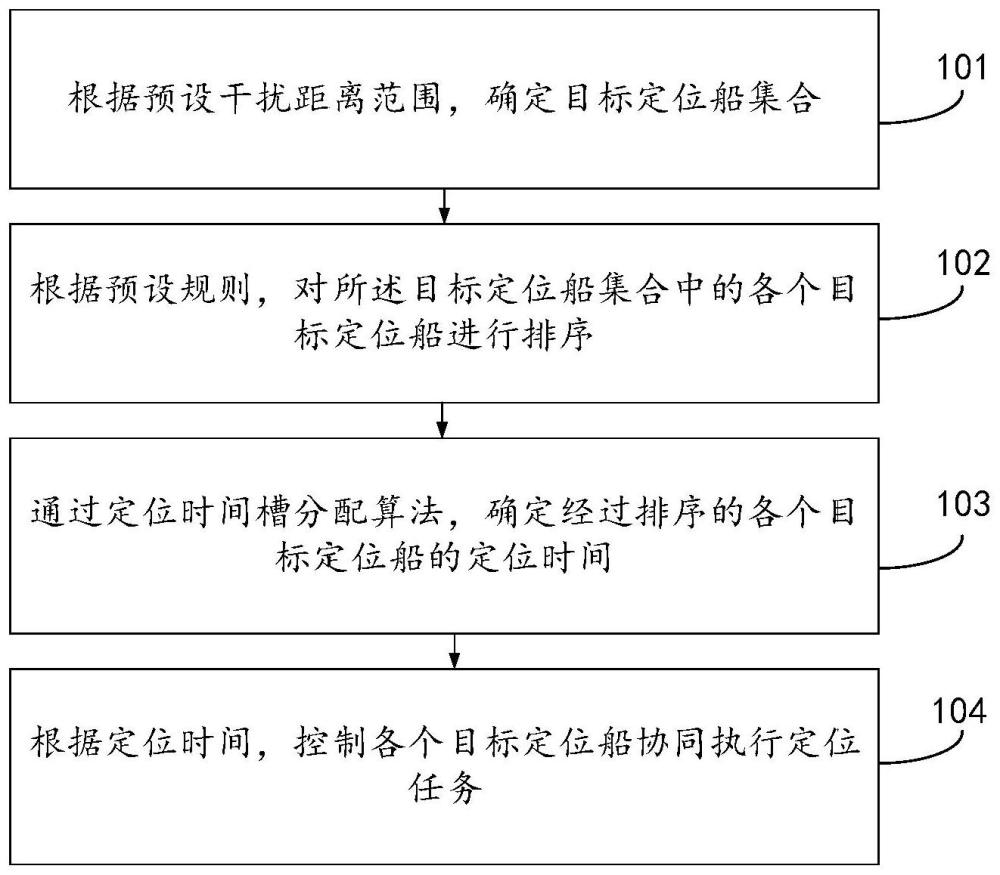
3、根据预设干扰距离范围,确定目标定位船集合;
4、根据预设规则,对所述目标定位船集合中的各个目标定位船进行排序;
5、通过定位时间槽分配算法,确定经过排序的各个目标定位船的定位时间;
6、根据定位时间,控制各个目标定位船协同执行定位任务。
7、可选地,所述通过定位时间槽分配算法,确定经过排序的各个目标定位船的定位时间,包括:
8、获取定位时间计算参数,所述定位时间计算参数包括当前系统工作时间、设定定位时间间隔、目标定位船集合中目标定位船的数量和定位船的排序标记;
9、通过将所述定位时间计算参数代入所述定位时间槽分配算法进行计算,获得所述定位时间计算参数对应的定位船的定位时间。
10、可选地,根据预设干扰距离范围,确定目标定位船集合之前,所述方法还包括:对定位船进行时间同步,获得经过时间同步的各个定位船。
11、可选地,所述方法还包括:
12、将所述目标定位船集合中的各个目标定位船的定位结果进行联合处理,获得各个应答器的具体位置。
13、可选地,确定所述预设干扰距离范围,包括:
14、根据各个定位船的探测范围,确定定位船之间是否存在信号干扰;
15、将存在信号干扰的各个定位船的探测范围确定为预设干扰距离范围。
16、可选地,所述方法还包括:
17、在监测到有新的定位船进入所述预设干扰距离范围的情况下,将所述新的定位船划分至所述目标定位船集合,以更新所述目标定位船集合;
18、通过所述新的定位船的探测范围对所述预设干扰距离范围进行更新。
19、可选地,对定位船进行时间同步,包括:
20、从多种时间同步方式中确定适配于定位船的结构配置的目标时间同步方式;
21、通过所述目标时间同步方式对定位船进行时间同步。
22、针对在先技术,本发明具备如下优点:
23、本发明所提供的一种多船协同定位控制,首先划定预设干扰距离范围,存在该范围内的定位船彼此之间将存在信号干扰,这些定位船组成目标定位船集合;根据预设规则将目标定位船集合中的各个目标定位船进行排序;按照排序,通过定位时间槽分配算法,确定各个目标定位船各自的定位时间;各个目标定位船根据自身的定位时间执行定位任务。由此,即使在一个小范围内,多个定位船也可以同时在该范围内执行定位任务,而不会发生干扰,可有效避免多个定位船同时在一个小范围内执行定位任务的干扰问题,使得在小范围内多定位船能够协同高效作业,实现了声学定位船设备的最大化利用和提升了作业效率。
24、本发明第二方面提供一种多船协同定位控制系统。旨在实现在小范围内多定位船协同高效作业,实现声学定位船设备的最大化利用和提升作业效率。
25、本发明提供的一种多船协同定位控制系统,包括:
26、目标定位船集合确定模块,用于根据预设干扰距离范围,确定目标定位船集合;
27、目标定位船排序模块,用于根据预设规则,对所述目标定位船集合中的各个目标定位船进行排序;
28、定位时间确定模块,用于通过定位时间槽分配算法,确定经过排序的各个目标定位船的定位时间;
29、定位任务执行模块,用于根据定位时间,控制各个目标定位船协同执行定位任务。
30、本发明第三方面提供一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
31、存储器,用于存放计算机程序;
32、处理器,用于执行存储器上所存放的程序时,实现第一方面所述的一种多船协同定位控制方法中的步骤。
33、本发明第四方面提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的一种多船协同定位控制方法中的步骤。
技术特征:
1.一种多船协同定位控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种多船协同定位控制方法,其特征在于,所述通过定位时间槽分配算法,确定经过排序的各个目标定位船的定位时间,包括:
3.根据权利要求1所述的一种多船协同定位控制方法,其特征在于,根据预设干扰距离范围,确定目标定位船集合之前,所述方法还包括:对定位船进行时间同步,获得经过时间同步的各个定位船。
4.据权利要求1所述的一种多船协同定位控制方法,其特征在于,所述方法还包括:
5.据权利要求1所述的一种多船协同定位控制方法,其特征在于,确定所述预设干扰距离范围,包括:
6.据权利要求5所述的一种多船协同定位控制方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的一种多船协同定位控制方法,其特征在于,对定位船进行时间同步,包括:
8.一种多船协同定位控制系统,其特征在于,所述系统包括:
9.一种电子设备,其特征在于,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1-7任一所述的一种多船协同定位控制方法中的步骤。
技术总结
本发明实施例涉及长基线声学定位技术领域,公开了一种多船协同定位控制方法、系统、电子设备及存储介质,包括:根据预设干扰距离范围,确定目标定位船集合;根据预设规则,对所述目标定位船集合中的各个目标定位船进行排序;通过定位时间槽分配算法,确定经过排序的各个目标定位船的定位时间;根据定位时间,控制各个目标定位船协同执行定位任务。旨在实现在小范围内多定位船协同高效作业,实现声学定位船设备的最大化利用和提升作业效率。
技术研发人员:秦学彬,陈传庚,徐朝红,韦秀波,何文蔚,贺再兴
受保护的技术使用者:中国石油天然气集团有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!