一种船舱舱口及舱内物料激光实时扫描方法及系统与流程
本发明属于港口工程机械自动化领域,具体涉及一种船舱舱口及舱内物料激光实时扫描方法及系统。
背景技术:
1、在贸易中,货物转运往往是通过港口进行的。在转运的货物中,除集装箱外,散货物料(大豆、煤、沙子等)也是重要的一部分。这些散货物料具有不同黏性,即在相同的抓斗抓力下,散货物料由于受到摩擦阻力和压差阻力的差异,导致抓斗抓取过程的稳定性存在差异。
2、如果抓斗抓取过程的稳定性过差,不仅会造成撒料,还可能会造成设备和船体相碰撞等安全风险。
3、然而,在抓斗抓取过程中,对船舱舱口及舱内物料的实时定位精度的不足和抓斗防摇晃反馈周期过长是导致抓斗控制过程不够完善、抓斗抓取过程的稳定性过差的主要原因。
4、上述问题是由于现有的抓斗定位系统无法做到对抓斗和船体的高精度实时冗余扫描,从而获得更新周期小于等于250毫秒并经过偏差校核的准确的抓斗定位数据,以满足抓斗防摇晃的闭环控制要求。
5、因此,如何使卸船机对船舱舱口及舱内物料进行实时、冗余的高精度扫描是目前有待解决的技术问题。
技术实现思路
1、为解决上述的技术问题,本发明提供一种船舱舱口及舱内物料激光实时扫描方法及系统,所述方法包括:
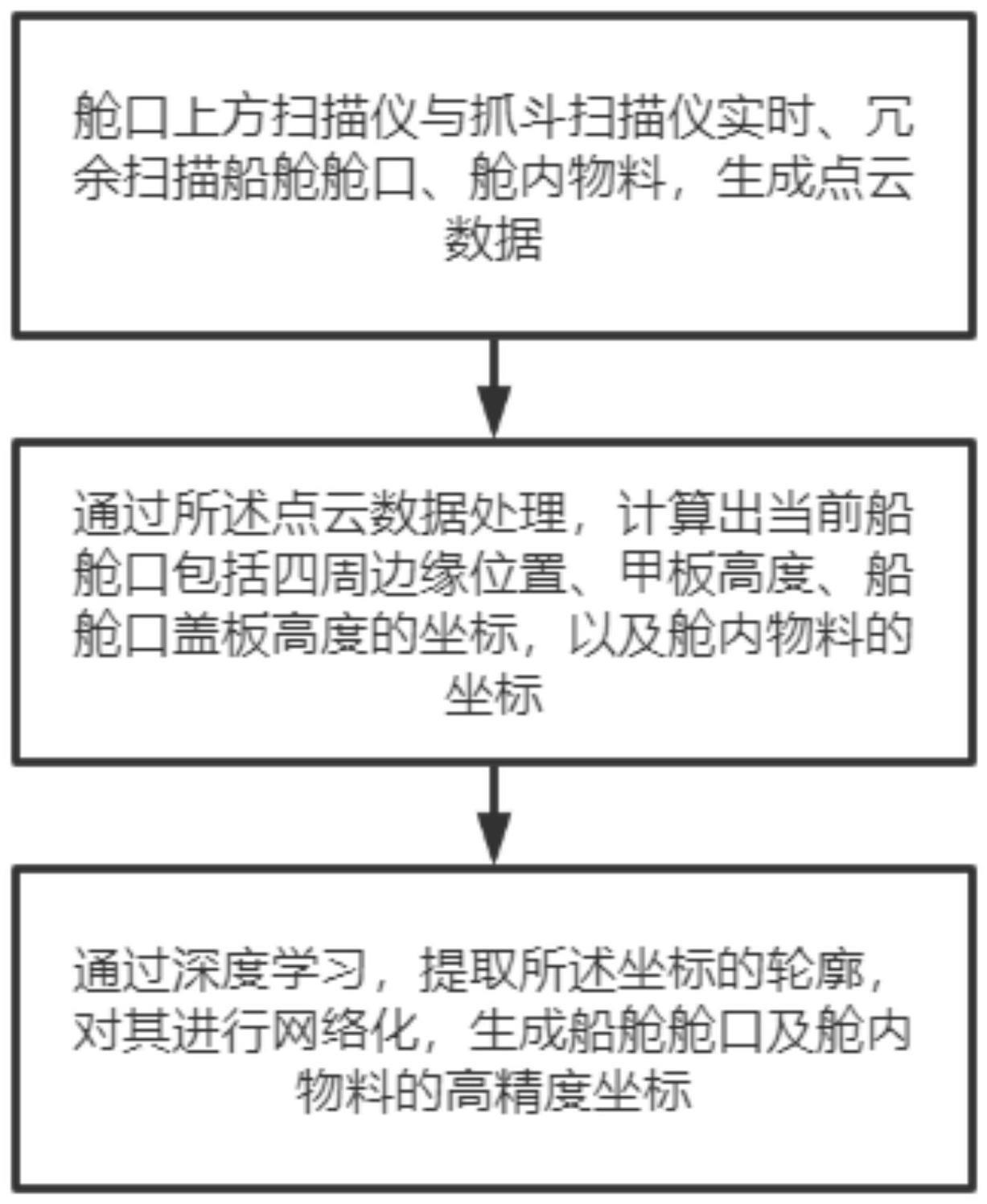
2、舱口上方扫描仪与抓斗扫描仪实时、冗余扫描船舱舱口、舱内物料,生成点云数据;
3、通过所述点云数据处理,计算出当前船舱口包括四周边缘位置、甲板高度、船舱口盖板高度的坐标,以及舱内物料的坐标;
4、通过深度学习,提取所述坐标的轮廓,对其进行网络化,生成船舱舱口及舱内物料的高精度坐标。
5、优选地,所述深度学习算法,包括卡尔曼滤波,结合卷积神经网络的输入,进行基于坐标的动态物体分割,通过投影关系得到每个点的去除摇晃扰动的静态标签,通过静态标签,提取所述坐标的轮廓。
6、本发明还提供一种高精度抓斗定位方法系统,包括:
7、3d激光雷达扫描装置、工业以太网总线和系统数据处理服务器;
8、所述3d激光雷达扫描装置设置于卸船机前大梁下方,用于对船舱舱口及舱内物料进行实时、冗余扫描,生成点云数据;
9、所述工业以太网总线,用于使3d激光雷达扫描装置和系统数据处理服务器进行以太网通讯;
10、所述系统数据处理服务器,用于点云数据的处理,计算出当前船舱口包括四周边缘位置、甲板高度、船舱口盖板高度的坐标,以及舱内物料的坐标,通过深度学习,提取所述坐标的轮廓,对其进行网络化,生成船舱舱口及舱内物料的高精度坐标。
11、因此,本申请可以解决卸船机对船舱舱口及舱内物料无法进行去除扫描结果中较小的摇晃的冗余、高精度、实时扫描的问题,并使其结果可以实时反馈给卸船机抓斗,使抓斗可以进行较平稳的抓取过程,并提高卸船机工作效率和企业效率。
技术特征:
1.一种船舱舱口及舱内物料激光实时扫描方法,包括:
2.根据权利要求1所述的方法,其中舱口上方扫描仪与抓斗扫描仪实时、冗余扫描船舱舱口、舱内物料,生成点云数据,包括:
3.根据权利要求1所述的方法,其中通过所述点云数据处理,计算出当前船舱口包括四周边缘位置、甲板高度、船舱口盖板高度的坐标,以及舱内物料的坐标,包括:
4.根据权利要求1所述的方法,其中通过深度学习,提取所述坐标的轮廓,对其进行网络化,生成船舱舱口及舱内物料的高精度坐标,包括:
5.根据权利要求4所述的方法,其中深度学习算法,包括:
6.一种船舱舱口及舱内物料激光实时扫描系统,包括:
7.根据权利要求6所述的系统,其中抓斗激光扫描系统,包括:
8.根据权利要求6所述的系统,其中系统数据处理服务器,包括:
技术总结
本发明公开了一种船舱舱口及舱内物料激光实时扫描方法及系统。该方法包括:舱口上方扫描仪与抓斗扫描仪实时、冗余扫描船舱舱口、舱内物料,生成点云数据;通过所述点云数据处理,计算出当前船舱口包括四周边缘位置、甲板高度、船舱口盖板高度的坐标,以及舱内物料的坐标;通过深度学习,提取所述坐标的轮廓,对其进行网络化,生成船舱舱口及舱内物料的高精度坐标。本发明实现了卸船机对船舱舱口及舱内物料的实时、冗余的高精度扫描。
技术研发人员:毛国明,李海明,陈锋,蒋斌,李来春,饶国平,蓝建刚,高峰,李永明,庞伟,任利志,乐波,张守文,刘聪,刘佳欣,丁晓平,王悦州,王水明
受保护的技术使用者:华能(浙江)能源开发有限公司玉环分公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!