一种分布式噪声测量系统的实时三维定位方法与流程
:本发明属于水声工程,具体涉及一种分布式噪声测量系统的实时三维定位方法。
背景技术
0、
背景技术:
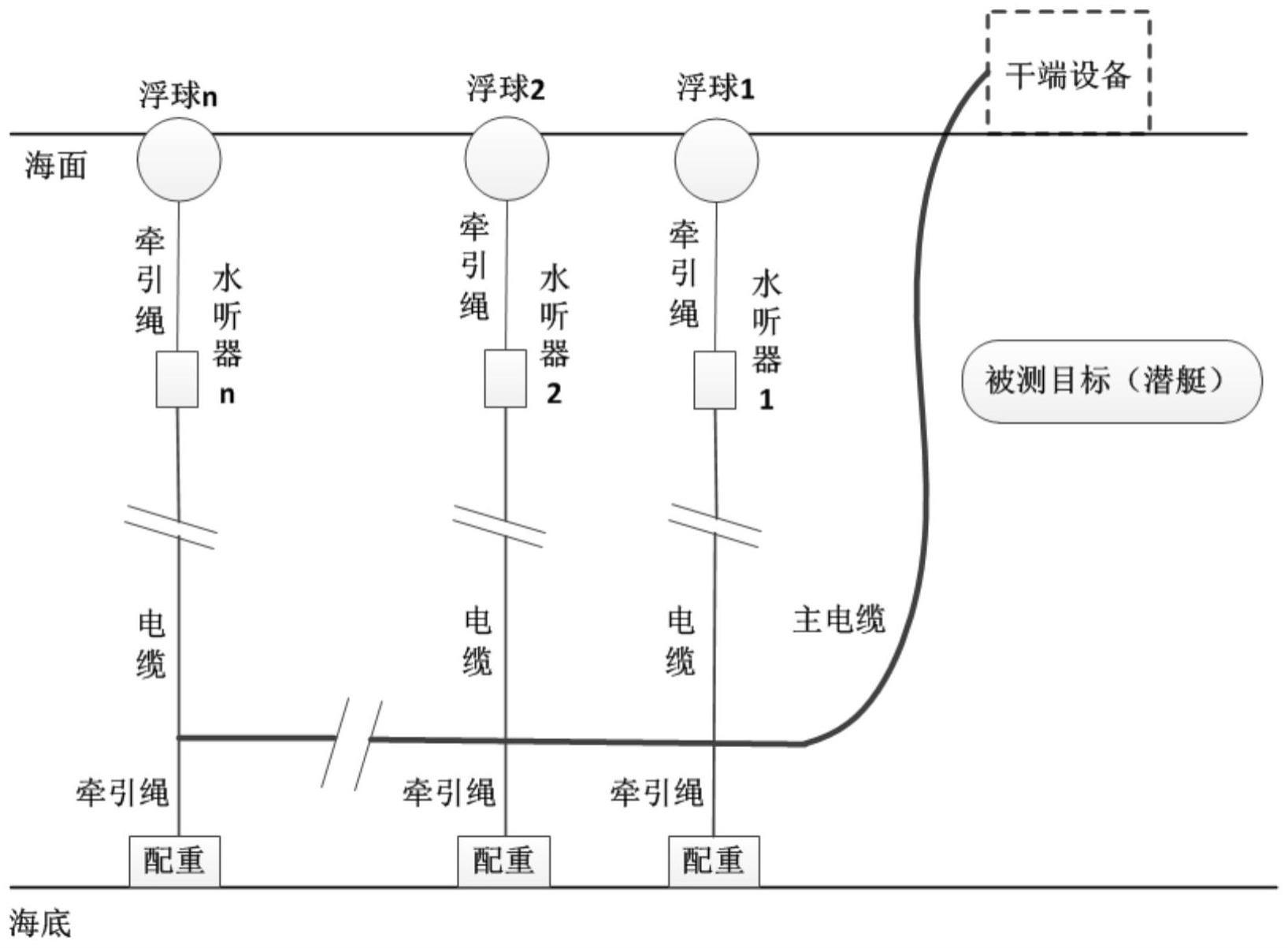
1、潜艇作为海军作战平台,进行辐射噪声测量是评价其战术优势和弱点必不可少的。潜艇辐射噪声测量的系统可以有多种,如水听器、水听器簇、水平阵、垂直阵等,典型的布放方式有:固定在海底、海上漂浮、在测量船后拖曳等。随着潜艇声隐身能力提升,辐射噪声越来越小,为了获得较高的测量“增益”且获得三维空间上的噪声辐射情况,多采用包含多水听器的测量系统,即分布式噪声测量系统,如图1所示,其水下湿端部分的主要特征是:在潜艇周围的水平面上布置若干个水听器,各水听器与浮球、电缆、牵引绳、配重(沉在海底)等串联形成分支,各分支并联在1条电缆并连接至干端设备,各水听器悬浮在水中深度可调节,实时接收辐射噪声信号并上传;根据实际的辐射噪声测量需求,确定系统在水平面上的布阵形式和间距、各水听器深度,完成辐射噪声测量的任务。在海上复杂的海况条件——波浪、海流、风等荷载影响下,分布式噪声测量系统中的各水听器在水中的三维位置(深度位置、水平面位置)是随着外界荷载而不断实时变化的。以水听器初始(所在分支处于垂直方向,倾角为0°)深度50米、受到外荷载后分支倾角20°为例计算,水听器在水平面上的偏移约17米,深度上变化为3.1米。当各水听器在水中不断变化时,其在被测目标(潜艇)周围的相对分布位置是实时变化的,降低了测量的准确性和精度。因此,如何快速简便、准确可靠地获取水听器在水中的实时三维位置,对提高辐射噪声测量十分重要。
技术实现思路
0、
技术实现要素:
1、本发明所要解决的技术问题是,提供一种分布式噪声测量系统的实时三维定位方法,该方法可实时计算获得分布式测量系统的三维空间定位,提高了噪声测量准确性,同时间接获得水下水流分布情况,为辐射噪声的精细化分析提供信息支撑,也适用于其他有若干垂直分支组成的海洋系统或装置。
2、本发明的技术解决方案是,提供一种分布式噪声测量系统的实时三维定位方法,包括以下步骤,
3、步骤1,准备工作,在分布式辐射噪声测量系统的各水听器所在分支分别增设2个深度传感器(内置于深度传感器舱),在被测潜艇目标处增加1个主动测距声源,其中,深度传感器用于实时测量深度值并上传到干端设备,主动测距声源用于间断发射主动高频信号,供水听器接收并实时测距;
4、步骤2,系统开始工作后,获取每个水听器测量值和中间计算值;
5、步骤3,通过相邻水听器的n次相互交叉验证,进行不断修正,以计算出各水听器的深度(an)和水平面位置(xn、yn),其中,n的数值不少于水听器数量值;
6、步骤4,每隔m秒(根据实际精度要求确定,m一般不超过2秒)不断重复上述计算过程,从而获得各水听器实时的三维空间位置。
7、作为优选,同一分支所在的2个深度传感器中的一个安装在对应水听器处,另一个安装在对应水听器所在分支与主电缆结合处。
8、作为优选,基于各水听器所在分支,对每个分支所在的水听器依序编码,假设所在分支的水听器编码为n,将分支上下2个深度传感器之间长度记为d,并将分支不发生倾斜时设定为初始位置,此时上下2个深度传感器深度数值分别记为hn-1、hn-2,测距声源测距数值记为ln,声源深度s;实时来流时,分支发生倾斜,分支的倾斜方向与来流方向一致且流速越大倾角越大,倾斜角度记为θn,上下两个深度传感器深度数值分别记为hn-1’、hn-2’,测距声源测距数值记为ln’;通过几何关系(反余弦函数)计算获得倾斜角度为θn=arccos((hn-2’)-(hn-1’)/d)。
9、进一步的,步骤4中,假设编码为n的水听器偏离初始位置后,实时位置与测距声源之间距离为ln’、倾斜角为θn,以及对相邻的编码为n+1的水听器及其所在的分支同步分析,计算获得编码为n+1的水听器的实时倾斜角且记为θn+1,计算获得编码为n+1的水听器实时位置与测距声源之间的距离并记为l(n+1)’;
10、通过ln’和倾斜角为θn,可确定编码为n的水听器的三维空间位置为pn-1和pn-2中的一个,以及通过l(n+1)’和θn+1,可确定编码为n++1的水听器的三维空间位置为p(n+1)-1和(n+1)-2中的一个;
11、基于相邻水听器之间距离和来流方向变化程度,近似认定编码为n的水听器和编码为n+1的水听器的水流方向相同,以及根据编码为n+1的水听器的两个流向倾斜θn+1角度,确定编码为n+1的水听器的两个可能位置,并分别计算该两个可能位置与声源之间的距离,以及根据计算的距离与实时距离l(n+1)’匹配,来确定编码为n+1的水听器的确定位置;以及通过反推,确定编码为n的水听器的确定位置。
12、采用以上方案后与现有技术相比,本发明具有以下优点:
13、1、在已有辐射噪声测量系统中增加的若干深度传感器、测距声源为成熟设备,简单便捷,易于工程实现,不影响原系统的功能性能和可靠性;2、通过增加的深度测量、水平面测距功能,可实时计算获得测量系统的三维空间定位,提高了噪声测量准确性,同时间接获得水下水流分布情况,为辐射噪声的精细化分析提供信息支撑;3、也适用于其他有若干垂直分支组成的海洋系统或装置。
技术特征:
1.一种分布式噪声测量系统的实时三维定位方法,其特征在于:包括以下步骤,
2.根据权利要求1所述的分布式噪声测量系统的实时三维定位方法,其特征在于:深度传感器内置于深度传感器舱中。
3.根据权利要求1所述的分布式噪声测量系统的实时三维定位方法,其特征在于:同一分支所在的2个深度传感器中的一个安装在对应水听器处,另一个安装在对应水听器所在分支与主电缆结合处。
4.根据权利要求1所述的分布式噪声测量系统的实时三维定位方法,其特征在于:步骤3中,基于各水听器所在分支,对每个分支所在的水听器依序编码,假设所在分支的水听器编码为n,将分支上下2个深度传感器之间长度记为d,并将分支不发生倾斜时设定为初始位置,此时上下2个深度传感器深度数值分别记为hn-1、hn-2,测距声源测距数值记为ln,声源深度s;实时来流时,分支发生倾斜,倾斜角度记为θn,上下两个深度传感器深度数值分别记为hn-1’、hn-2’,测距声源测距数值记为ln’;通过几何关系计算获得倾斜角度为θn=arccos((hn-2’)-(hn-1’)/d)。
5.根据权利要求3所述的分布式噪声测量系统的实时三维定位方法,其特征在于:通过反余弦函数计算获得倾斜角度为θn=arccos((hn-2’)-(hn-1’)/d)。
6.根据权利要求3所述的分布式噪声测量系统的实时三维定位方法,其特征在于:步骤4中,假设编码为n的水听器偏离初始位置后,实时位置与测距声源之间距离为ln’、倾斜角为θn,以及对相邻的编码为n+1的水听器及其所在的分支同步分析,计算获得编码为n+1的水听器的实时倾斜角且记为θn+1,计算获得编码为n+1的水听器实时位置与测距声源之间的距离并记为l(n+1)’;
技术总结
本发明公开了一种分布式噪声测量系统的实时三维定位方法,包括以下步骤,步骤1,准备工作,在分布式辐射噪声测量系统的各水听器所在分支分别增设2个深度传感器,在被测潜艇目标处增加1个主动测距声源;步骤2,系统开始工作后,获取每个水听器测量值和中间计算值;步骤3,通过相邻水听器的N次相互交叉验证,进行不断修正,以计算出各水听器的深度(An)和水平面位置(Xn、Yn),其中,N的数值不少于水听器数量值。本发明可实时计算获得分布式测量系统的三维空间定位,提高了噪声测量准确性,同时间接获得水下水流分布情况,为辐射噪声的精细化分析提供信息支撑。
技术研发人员:李豹,张博彦,严伟,董义俊,武靖昊,翁金辉
受保护的技术使用者:中国船舶重工集团公司第七一五研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!