本申请涉及工业视觉,尤其涉及一种用于极片检测的高速前馈系统及方法。
背景技术:
1、随着新能源产业的不断发展,锂电池技术以其高能量密度、无污染、长寿命等优势被广泛应用于手机、笔记本电脑、无人驾驶汽车等众多领域。锂电池的电池极片中:上下两层为炭粉层,中间为金属层。在锂电池制作工艺中,受加工设备稳定性影响,极片切割过程有可能出现金属层毛刺穿透炭粉层的情况,容易造成电池内部短路,为电池使用留下重大安全隐患。
2、因此,极片毛刺检测直接关系到电池的安全性和可靠性。然而,在锂电池极片毛刺检测技术上,受实际工艺设备的重复性影响,传送带上的极片端面位置会在一定范围波动,并不会稳定在一个固定的位置上。导致极片端面在景深方向上会快速变化,基于显微成像的检测系统固有景深小的限制难以对极片端面清晰成像,无法满足实时工业检测的需求。
3、目前现有技术中,普遍采用人工抽检和缩小孔径光阑扩大景深的方式进行极片毛刺检测。人工抽检方式,需要人工选取部分样品,并将样品放置在专业显微镜下,人工对焦并逐个位置并判断是否存在毛刺的缺陷,效率低下;缩小孔径光阑扩大景深的方式,可实现在线检测,但通过缩小孔径光阑的尺寸扩大景深范围有限,无法满足极片端面在较大范围波动下的清晰成像的需求,因此检测的数量受到限制,同时由于缩小孔径光阑影响系统通光量,造成成像信噪比严重下降,不利于后续的机器视觉算法检测毛刺的缺陷的准确度。
技术实现思路
1、本申请提供了一种用于极片检测的高速前馈系统及方法,以解决现有技术中锂电池极片毛刺检测中存在效率较低和准确度不足的问题。
2、本申请采用的技术方案如下:
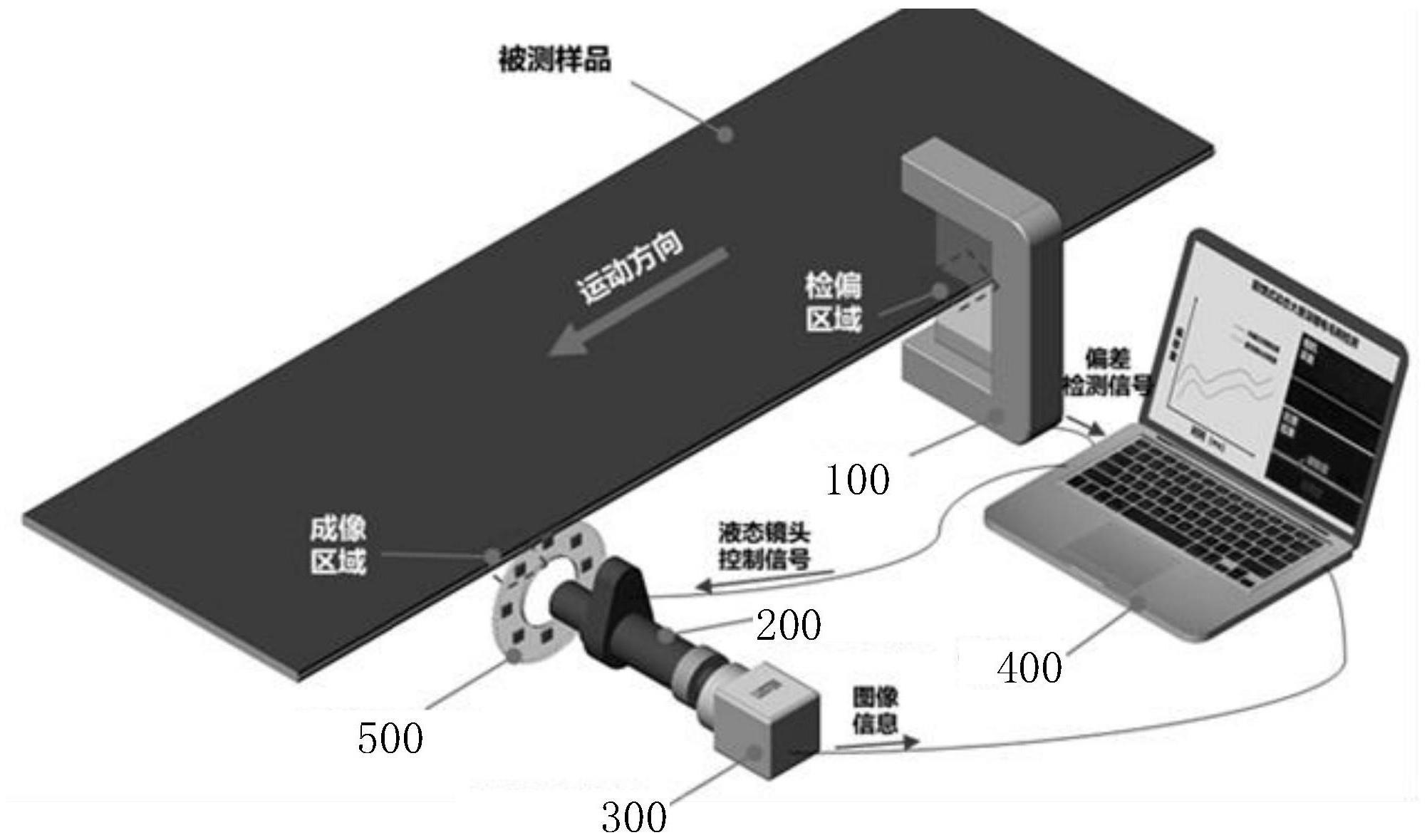
3、本申请的第一方面,提供一种用于极片检测的高速前馈系统,包括激光纠偏仪、液态远心镜头、高速面阵相机以及计算机;
4、其中,所述激光纠偏仪被配置为:实时测量极片端面在景深方向的相对位置,发送偏差检测信号;
5、所述计算机被配置为:接收所述偏差检测信号,发送液态镜头控制信号;
6、所述液态远心镜头被配置为:接收所述液态镜头控制信号,根据所述液态镜头控制信号调整屈光度改变成像物平面位置;
7、所述高速面阵相机被配置为:通过所述液态远心镜头进行图像采集,获得极片端面图像;
8、所述计算机还被配置为:接收所述极片端面图像,通过视觉算法检测极片毛刺缺陷。
9、在一些实施例中,还包括环形led阵列和补光控制器,所述补光控制器根据所述激光纠偏仪的控制信号控制所述环形led阵列的灯光开闭。
10、在一些实施例中,所述计算机进一步被配置为:接收所述偏差检测信号,延时发送经过校正算法处理后的液态镜头控制信号。
11、在一些实施例中,所述校正算法为:
12、
13、其中,v(m/s)为传送带匀速运动速度,l(m)为激光纠偏仪和液态远心镜头在传送带运动方向上的相对距离,dx(m)为激光纠偏仪和液态远心镜头在成像景深方向的相对距离,f(hz)为纠偏仪采样频率,xn(m)为第n次输出偏差,δt1(s)为通讯系统传输延时,φn(dpt)为液态远心镜头第n次屈光度,δt2(s)为液态镜头响应延时,k(m/dpt)为液态远心镜头工作距离灵敏度。
14、本申请的第二方面,提供一种用于极片检测的高速前馈方法,包括以下步骤:
15、实时测量极片端面在景深方向的相对位置,发送偏差检测信号;
16、接收所述偏差检测信号,发送液态镜头控制信号;
17、接收所述液态镜头控制信号,根据所述液态镜头控制信号调整液态远心镜头的屈光度改变成像物平面位置;
18、通过所述液态远心镜头进行图像采集,获得极片端面图像;
19、接收所述极片端面图像,通过视觉算法检测极片毛刺缺陷。
20、在一些实施例中,在所述通过所述液态远心镜头进行图像采集,获得极片端面图像的步骤中,还包括:
21、同时开启环形led阵列,照射极片端面进行补光。
22、在一些实施例中,在所述接收所述偏差检测信号,发送液态镜头控制信号的步骤中,还包括:
23、接收所述偏差检测信号,延时发送经过校正算法处理后的液态镜头控制信号。
24、在一些实施例中,所述延时依据激光纠偏仪和液态远心镜头的距离、传送带运动速度和激光纠偏仪的采样频率参数信息,计算发送液态镜头控制信号的延迟量。
25、在一些实施例中,在所述接收所述偏差检测信号,延时发送经过校正算法处理后的液态镜头控制信号的步骤中,还包括:预先测量并获取算法参数信息,配置校正算法;
26、其中,所述算法参数信息包括传送带匀速运动速度v(m/s),激光纠偏仪和液态远心镜头在传送带运动方向上的相对距离l(m),激光纠偏仪和液态远心镜头在成像景深方向的相对距离dx(m),激光纠偏仪采样频率为f(hz),第n次输出偏差为xn(m),通讯系统传输延时为δt1(s),液态镜头第n次屈光度为фn(dpt),液态镜头响应延时为δt2(s),整个液态镜头组工作距离灵敏度为k(m/dpt);
27、所述校正算法为:
28、
29、采用本申请的技术方案的有益效果如下:
30、本申请的用于极片检测的高速前馈系统及方法,具备以下优点:
31、1)本申请基于前馈式校正,相比于基于图像离焦结果的负反馈式系统,具有响应速度快,有效避免漏检的优点,特别适合用于高速运动场景中;
32、2)相较于固定式大景深检测系统,本申请可满足任意变化景深的成像场景,不受光学系统固有景深的限制,具有极大的灵活性;同时,本申请具有较好的景深适应能力,实现大景深,允许较大的孔径光阑,有利于保证较好的成像分辨率和成像信噪比;
33、3)本申请基于液态镜头实现物面调整,相较于传统的机械式调焦,由于液态镜头具有响应速度快、稳定性好、体积小以及重复性强等优点,使得本申请更适应高速检测的应用场景;
34、4)本申请基于液态远心镜头,其控制量(电流)与被控制量(物面位置)存在较好的线性关系,无需复杂的非线性校正方法,结构和算法相对简单,有利于获得检测的稳定性和准确度。
技术特征:1.一种用于极片检测的高速前馈系统,其特征在于,包括激光纠偏仪、液态远心镜头、高速面阵相机以及计算机;
2.根据权利要求1所述的用于极片检测的高速前馈系统,其特征在于,还包括环形led阵列和补光控制器,所述补光控制器根据所述激光纠偏仪的控制信号控制所述环形led阵列的灯光开闭。
3.根据权利要求1所述的用于极片检测的高速前馈系统,其特征在于,所述计算机进一步被配置为:接收所述偏差检测信号,延时发送经过校正算法处理后的液态镜头控制信号。
4.根据权利要求3所述的用于极片检测的高速前馈系统,其特征在于,所述校正算法为:
5.一种用于极片检测的高速前馈方法,其特征在于,包括以下步骤:
6.根据权利要求5所述的用于极片检测的高速前馈方法,其特征在于,在所述通过所述液态远心镜头进行图像采集,获得极片端面图像的步骤中,还包括:
7.根据权利要求5所述的用于极片检测的高速前馈方法,其特征在于,在所述接收所述偏差检测信号,发送液态镜头控制信号的步骤中,还包括:
8.根据权利要求7所述的用于极片检测的高速前馈方法,其特征在于,所述延时依据激光纠偏仪和液态远心镜头的距离、传送带运动速度和激光纠偏仪的采样频率参数信息,计算发送液态镜头控制信号的延迟量。
9.根据权利要求7所述的用于极片检测的高速前馈方法,其特征在于,在所述接收所述偏差检测信号,延时发送经过校正算法处理后的液态镜头控制信号的步骤中,还包括:预先测量并获取算法参数信息,配置校正算法;
技术总结本申请属于工业视觉技术领域,尤其涉及一种用于极片检测的高速前馈系统及方法。本申请的用于极片检测的高速前馈方法,根据前馈式参数信息调整液态远心镜头的屈光度;获得了较佳成像分辨率和成像信噪比的极片端面图像;再通过视觉算法即完成极片的毛刺缺陷检测。本申请基于前馈式校正,具有响应速度快,有效避免漏检的优点,适用于高速运动场景;不受光学系统固有景深的限制,允许较大的孔径光阑,具有极大的灵活性,同时有利于获得较佳的成像分辨率和成像信噪比;液态远心镜头具有响应速度快、稳定性好、体积小以及重复性强等优点,使得本申请更适应高速检测的应用场景;本申请结构和算法相对简单,有利于获得检测的稳定性和准确度。
技术研发人员:陈文,张雪丹,李锦程,杨艺
受保护的技术使用者:凌云光技术股份有限公司
技术研发日:技术公布日:2024/1/13