一种基于激光雷达点云的高架边墙提取方法与流程
本发明属于智能驾驶,具体涉及到一种基于激光雷达点云的高架边墙提取方法。
背景技术:
1、随着智慧城市、智能交通的加快,城市市政高架道路清扫作业的范围不断扩大,道路清洁维护的要求不断的提高,而同时由于作业强度大和作业环境差的影响,市政作业人力资源也不断的增大,这一现象为智能驾驶清扫车等智能化市政作业车辆带来了机遇,目前智能清扫已经成为智能驾驶的一个重要的应用场景。
2、在实际清扫过程中,为了不影响白天的正常交通,保证清扫维护作业人员的安全,高架道路的清扫作业通常安排在夜间封路进行。同时为了保证不留清扫死角,在清扫的过程中就需要清扫车能够紧贴高架道路边墙进行清扫,这就要求清扫车对于自身与边墙的横向距离有准确的感知。但是夜间清扫作业时光线条件差,传统的基于视觉的识别和高架道路边沿识别准确率急剧下降。同时由于城市内部高楼林立、高架纵横,gnss信号受到遮挡和多径效应的影响,准确度下降,因此基于高精度定位信号的循迹清扫方法也受到很大的影响,目前针对有关高架道路边墙提取的研究较少,尚无实际的应用,但是随着城市的发展,促进市政清扫作业的智能化,应用于夜间智能驾驶清扫场景下,高架道路的清扫过程中高架道路边墙提取的问题亟待解决。
技术实现思路
1、针对上述问题,本发明的主要目的在于设计一种基于激光雷达点云的高架边墙提取方法,通过对道路边墙分割完成后点云进行滤波预处理、栅格化、然后运用高斯过程的方法提取出高架道路边墙,解决清扫车到高架边墙的横向距离准确估计的技术问题。
2、为了实现上述目的本发明采用如下技术方案:
3、一种基于激光雷达点云的高架边墙提取方法,包括以下步骤:
4、步骤1:收集边墙点云数据;
5、步骤2:对收集的点云数据进行预处理;
6、步骤3:将预处理后的点云数据栅格化;
7、步骤4:根据预设路径,在栅格化的数据中提取边墙的初始种子栅格;
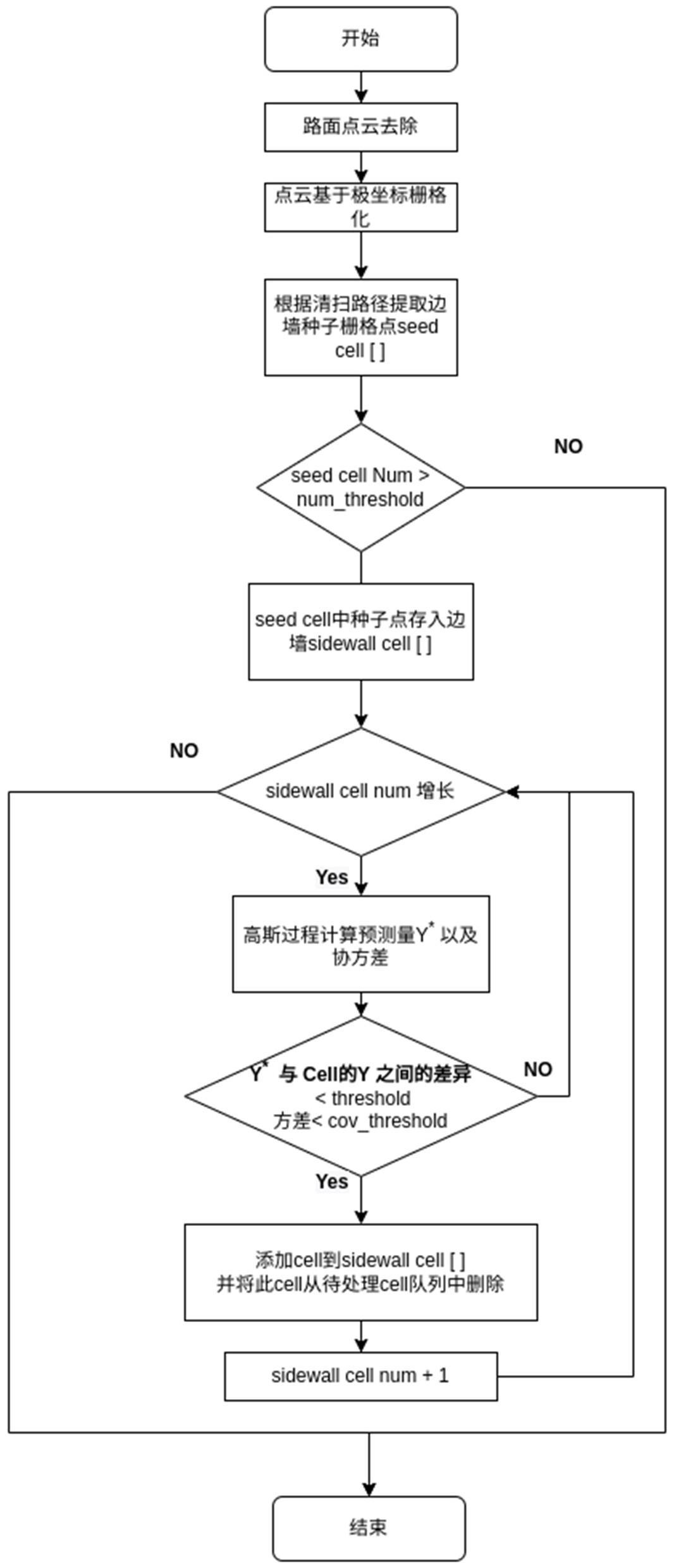
8、步骤5:根据边墙初始种子栅格,利用高斯过程提取边墙的栅格,得到边墙点云。
9、作为本发明进一步的描述,步骤1中,利用清扫车搭载激光雷达,通过激光雷达进行发散扫描,得到边墙点云数据。
10、作为本发明进一步的描述,步骤2中,通过设置距离和高度门限,对点云进行滤波处理,具体为,针对高度大于4m的点,及到测量中心点距离大于50m的点进行滤除。
11、作为本发明进一步的描述,步骤3中,点云数据的栅格化为基于极坐标系的栅格化,并记录每个栅格中的点与清扫车横向距离最小的点、以及离地面最高的点和最低的点。
12、作为本发明进一步的描述,步骤4中,根据边墙的高度特征,结合栅格中的点云数量,从所有栅格中筛选出边墙栅格,然后根据清扫车的清扫路径,选择离路径最近的边墙栅格作为边墙的初始种子栅格cell,并存入备选边墙栅格cell集合。
13、作为本发明进一步的描述,步骤4中,具体的筛选方式为:
14、边墙的备选栅格cell应当满足:栅格cell最低点高度低于cell_min_z,栅格cell最高点高度高于cell_max_z,以及栅格cell中的点云数量point_num大于num_th三个条件,即同时满足以下条件的栅格cell为备选边墙栅格cell:
15、
16、其中,式中,cellz_max为每个栅格cell的最高点,cellz_max.z指的是此cellz_max的z坐标,cellz_min为每个栅格cell最低点,cellz_min.z为cellz_min的z坐标,pointnum为此栅格cell中包含的激光点的数量,num_th为成为备选边墙栅格cell所需要的激光点的数量门限。
17、作为本发明进一步的描述,步骤5中,利用高斯过程提取边墙栅格的过程为,根据边墙栅格cell集合,利用高斯过程计算出来的备选边墙栅格cell特征点y坐标预测值,然后根据备选边墙栅格cell特征点y坐标的实际值与预测值之间的误差以及备选边墙栅格cell特征点y坐标预测值的方差,进而判定备选边墙栅格cell是否属于边墙。
18、作为本发明进一步的描述,步骤5中,具体的计算协方差包括:
19、
20、其中,式中,ks为边墙栅格cell集合(xs,ys)的协方差,kc为备选边墙栅格cell集合(xc,yc)的协方差,ksc为边墙栅格cell集合(xs,ys)和备选边墙栅格cell集合(xc,yc)之间的协方差;
21、同时,协方差计算函数如下:
22、
23、其中,式中,xi为栅格cell(i)的特征点x坐标,xj为栅格cell(j)的特征点x坐标,k(xi,xj)为栅格cell(i)与栅格cell(j)的协方差,σ与l为超参数。
24、作为本发明进一步的描述,步骤5中,根据协方差,计算得到备选边墙栅格cell的边墙特征点y坐标预测值以及预测值对应的方差,具体计算方式如下:
25、
26、其中,式中,ypredict为根据协方差计算得到的备选边墙栅格cell集合的特征点y坐标的预测值,为协方差ksc的转置,为协方差矩阵ks的逆矩阵,ys为边墙栅格cell的特征点y坐标;cov为备选边墙栅格cell的边墙特征点y坐标预测值对应的方差,kc为备选边墙栅格cell集合(xc,yc)协方差,ksc为边墙栅格cell集合(xs,ys)和备选边墙栅格cell集合(xc,yc)之间的协方差。
27、作为本发明进一步的描述,步骤5中,根据得到的ypredict与cov判断待处理的备选边墙栅格cell是否属于边墙,同时满足以下条件被认定为边墙栅格cell:
28、
29、其中,式中,ypredict(i)为备选边墙栅格cell中第i个栅格cell的特征点y坐标预测值,yc(i)为备选边墙栅格cell中第i个栅格cell的特征点实际y坐标值,cov(i,i)为备选边墙栅格cell中第i个栅格cell的协方差,ty为设定的距离门限,tcov为设定的方差门限;
30、将满足边墙条件的备选边墙栅格(xc(i),yc(i))添加到边墙栅格cell集合(xs,ys)中,然后根据新的边墙栅格cell集合重复计算过程,得到所有的边墙栅格cell;将边墙栅格cell中的激光点,聚合到一起,即为边墙的点云。
31、相对于现有技术,本发明的技术效果为:
32、本发明提供了一种基于激光雷达点云的高架边墙提取方法,将激光雷达与清扫车结合在一一起,将边墙点云提取的过程,通过点云栅格化,然后利用高斯过程来进行边墙栅格的筛选。由选取的初始种子栅格,根据高斯过程得到每个备选栅格的预测,与预设路径的实际测量值进行对比,来判断备选栅格是否属于边墙,还将方差引入作为判断门限,提高了处理速度以及边墙点云提取的准确度,实现自动驾驶清扫车的精准贴边清扫,促进了市政清扫作业的智能化。
技术特征:
1.一种基于激光雷达点云的高架边墙提取方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于激光雷达点云的高架边墙提取方法,其特征在于:步骤1中,利用清扫车搭载激光雷达,通过激光雷达进行发散扫描,得到边墙点云数据。
3.根据权利要求1所述的一种基于激光雷达点云的高架边墙提取方法,其特征在于:步骤2中,通过设置距离和高度门限,对点云进行滤波处理,具体为,针对高度大于4m的点,及到测量中心点距离大于50m的点进行滤除。
4.根据权利要求1所述的一种基于激光雷达点云的高架边墙提取方法,其特征在于:步骤3中,点云数据的栅格化为基于极坐标系的栅格化,并记录每个栅格中的点与清扫车横向距离最小的点、以及离地面最高的点和最低的点。
5.根据权利要求4所述的一种基于激光雷达点云的高架边墙提取方法,其特征在于:步骤4中,根据边墙的高度特征,结合栅格中的点云数量,从所有栅格中筛选出边墙栅格,然后根据清扫车的清扫路径,选择离路径最近的边墙栅格作为边墙的初始种子栅格cell,并存入备选边墙栅格cell集合。
6.根据权利要求5所述的一种基于激光雷达点云的高架边墙提取方法,其特征在于:步骤4中,具体的筛选方式为:
7.根据权利要求5所述的一种基于激光雷达点云的高架边墙提取方法,其特征在于:步骤5中,利用高斯过程提取边墙栅格的过程为,根据边墙栅格cell集合,利用高斯过程计算出来的备选边墙栅格cell特征点y坐标预测值,然后根据备选边墙栅格cell特征点y坐标的实际值与预测值之间的误差以及备选边墙栅格cell特征点y坐标预测值的方差,进而判定备选边墙栅格cell是否属于边墙。
8.根据权利要求7所述的一种基于激光雷达点云的高架边墙提取方法,其特征在于:步骤5中,具体的计算协方差包括:
9.根据权利要求8所述的一种基于激光雷达点云的高架边墙提取方法,其特征在于:步骤5中,根据协方差,计算得到备选边墙栅格cell的边墙特征点y坐标预测值以及预测值对应的方差,具体计算方式如下:
10.根据权利要求9所述的一种基于激光雷达点云的高架边墙提取方法,其特征在于:步骤5中,根据得到的ypredict与cov判断待处理的备选边墙栅格cell是否属于边墙,同时满足以下条件被认定为边墙栅格cell:
技术总结
本发明公开一种基于激光雷达点云的高架边墙提取方法,将激光雷达与清扫车结合在一起,将边墙点云提取的过程,通过点云栅格化,然后利用高斯过程来进行边墙栅格的筛选,由选取的初始种子栅格,根据高斯过程得到每个备选栅格的预测,与预设路径的实际测量值进行对比,来判断备选栅格是否属于边墙,还将方差引入作为判断门限,提高了处理速度以及边墙点云提取的准确度,实现自动驾驶清扫车的精准贴边清扫,促进了市政清扫作业的智能化。
技术研发人员:严尉剑,王然,王哲成,杨淑君,李陆君,杨少磊
受保护的技术使用者:上海友道智途科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!