一种陀螺仪的零偏校准方法及装置与流程
本发明涉及陀螺仪传感器,尤其涉及一种陀螺仪的零偏校准方法及装置。
背景技术:
1、陀螺仪作为一种用来测量角速度或角位移的传感器,在工业领域已得到广泛应用。
2、零偏(bias)是衡量陀螺仪性能的重要指标之一。由于器件的固有属性,陀螺仪在静止状态下仍会输出信号,在角速度输入为零时,即上述静止状态下,将陀螺仪的输出信号的平均值折算为角速率后,将该角速率作为零偏。现实中,零偏会随着贮存时间的增加而增加,以致超出合格阈值导致陀螺仪性能变差,因此,对陀螺仪的零偏进行校正对于保证测量精度十分必要。
3、目前普遍采用的零偏校正方法是在陀螺仪每次上电工作时都对陀螺仪的零偏进行补偿以消除零偏,然后再进行角速率测量。这种方法需要陀螺仪在每次工作时都进行零偏校准,增加了陀螺仪的工作延时,使得陀螺仪测量工作不够灵敏。
技术实现思路
1、本发明提供一种陀螺仪的零偏校准方法及装置,用以解决现有技术中陀螺仪每次校准过程延迟时间长的缺陷,提高陀螺仪的测量灵敏度。
2、本发明提供一种陀螺仪的零偏校准方法,包括:
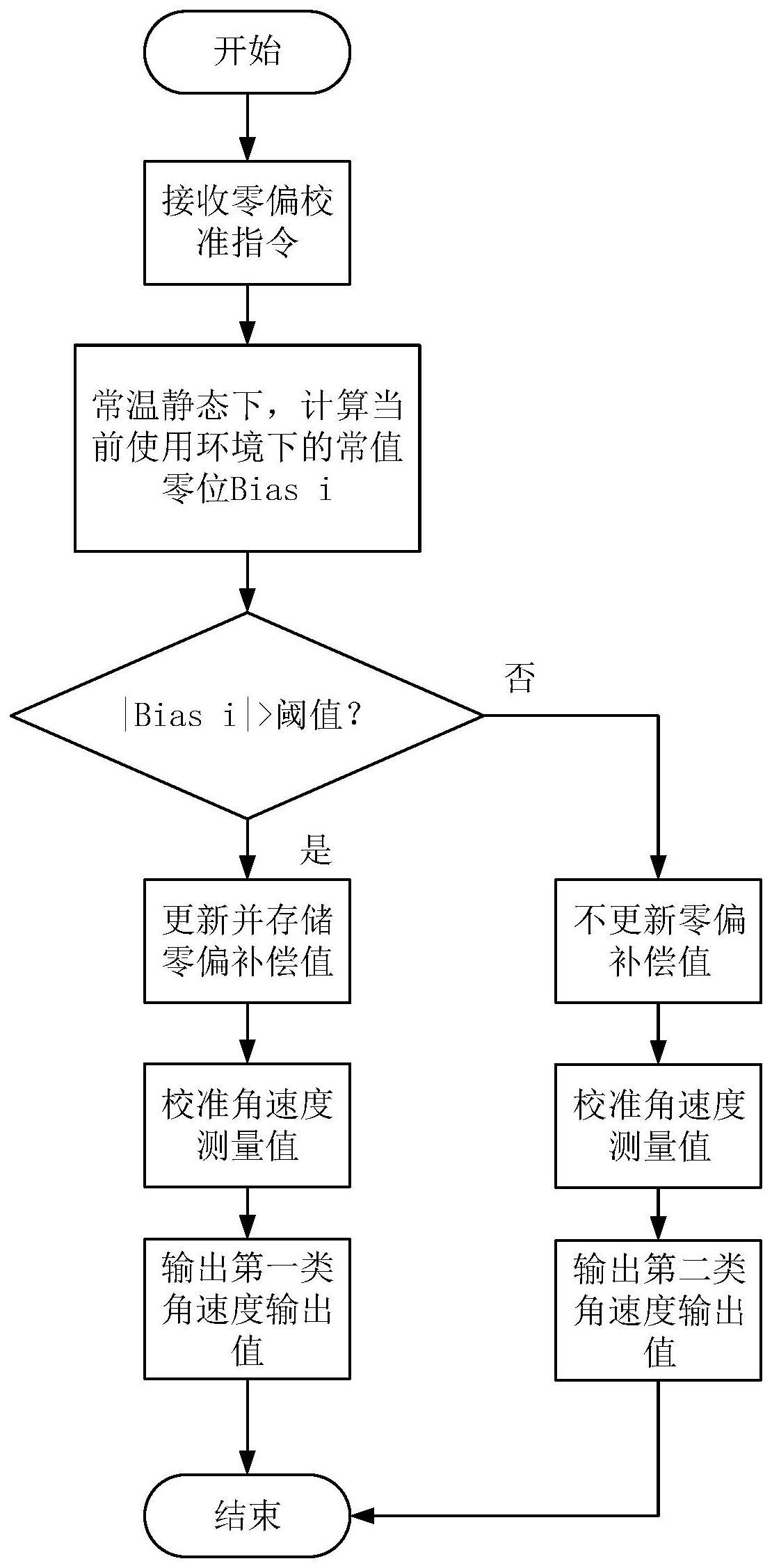
3、在静态状态下,响应于零偏校准指令,计算当前使用环境下的常值零位;
4、根据所述当前使用环境下的常值零位与零偏指标合格判定阈值之间的大小关系判断是否需要更新零偏补偿值;
5、若是,则更新零偏补偿值,并在工作状态下,基于更新后的零偏补偿值对角速度测量值进行校准,得到第一类角速度输出值;
6、输出所述第一类角速度输出值。
7、根据本发明提供的一种陀螺仪的零偏校准方法,所述计算当前使用环境下的常值零位,包括:
8、在所述静态状态下,采集预设时间段内的多个输出采样值;
9、对所述多个输出采样值求均值,得到当前使用环境下的所述常值零位。
10、根据本发明提供的一种陀螺仪的零偏校准方法,所述方法还包括:
11、若否,则基于上一次保存的零偏补偿值对角速度测量值进行校准,得到第二类角速度输出值,并输出所述第二类角速度输出值。
12、根据本发明提供的一种陀螺仪的零偏校准方法,所述基于更新后的零偏补偿值对角速度测量值进行校准,得到第一类角速度输出值,包括:
13、计算所述角速度测量值与所述更新后的零偏补偿值的差值,得到所述第一类角速度输出值。
14、根据本发明提供的一种陀螺仪的零偏校准方法,所述更新零偏补偿值,包括:
15、获取当前使用环境下的所述常值零位;
16、基于当前使用环境下的所述常值零位,对上一次保存的零偏补偿值进行更新,得到更新后的零偏补偿值;
17、保存所述更新后的零偏补偿值至本地。
18、根据本发明提供的一种陀螺仪的零偏校准方法,所述工作状态为静止状态或运动状态。
19、本发明还提供一种陀螺仪的零偏校准装置,包括:
20、常值零位计算模块,用于在静态状态下,响应于零偏校准指令,计算当前使用环境下的常值零位;
21、校准流程判断模块,用于根据所述当前使用环境下的常值零位与零偏指标合格判定阈值之间的大小关系判断是否需要更新零偏补偿值;
22、零偏补偿值更新模块,用于若是,则更新零偏补偿值,并在工作状态下,基于更新后的零偏补偿值对实时角速度测量值进行补偿,得到第一类角速度输出值;
23、角速度输出模块,用于输出所述第一类角速度输出值。
24、本发明还提供一种陀螺仪传感器,包括陀螺仪、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述陀螺仪的零偏校准方法。
25、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述陀螺仪的零偏校准方法。
26、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述陀螺仪的零偏校准方法。
27、本发明提供的陀螺仪的零偏校准方法,通过在静态状态下,响应于零偏校准指令,计算当前使用环境下的常值零位;根据当前使用环境下的常值零位与零偏指标合格判定阈值之间的大小关系判断是否需要更新零偏补偿值;若是,则更新零偏补偿值,并在工作状态下,基于更新后的零偏补偿值对角速度测量值进行校准,得到第一类角速度输出值;输出第一类角速度输出值。本发明通过根据实际需求灵活设置零偏指标合格判定阈值,在每次校准时都判断当前使用环境下的常值零位与上述零偏指标合格判定阈值的大小关系,从而自动更新或不更新零偏补偿值,实现对角速度测量值的校准,这种方法不需要每次都对零偏补偿值进行更新,只有在判断当前使用环境下的常值零位与上述零偏指标合格判定阈值满足一定的大小关系时,才更新零偏补偿值,也就是说在多数情况下不需要更新零偏补偿值,节省了时间成本,同时能够保障陀螺仪测量的准确度,提高了陀螺仪的工作效率。进一步地,上述零偏指标合格判定阈值可根据实际需求灵活设置,使得校准过程能够适用于更广泛的应用场景。
技术特征:
1.一种陀螺仪的零偏校准方法,其特征在于,包括:
2.根据权利要求1所述的陀螺仪的零偏校准方法,其特征在于,所述计算当前使用环境下的常值零位,包括:
3.根据权利要求1所述的陀螺仪的零偏校准方法,其特征在于,所述方法还包括:
4.根据权利要求1所述的陀螺仪的零偏校准方法,其特征在于,所述基于更新后的零偏补偿值对角速度测量值进行校准,得到第一类角速度输出值,包括:
5.根据权利要求1所述的方法,其特征在于,所述更新零偏补偿值,包括:
6.根据权利要求1至5任一项所述的方法,其特征在于,所述工作状态为静止状态或运动状态。
7.一种陀螺仪的零偏校准装置,其特征在于,包括:
8.一种陀螺仪传感器,包括陀螺仪、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述的陀螺仪的零偏校准方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的陀螺仪的零偏校准方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的陀螺仪的零偏校准方法。
技术总结
本发明提供一种陀螺仪的零偏校准方法及装置,包括:在静态状态下,响应于零偏校准指令,计算当前使用环境下的常值零位;根据当前使用环境下的常值零位与零偏指标合格判定阈值之间的大小关系判断是否需要更新零偏补偿值;若是,则更新零偏补偿值,并在工作状态下,基于更新后的零偏补偿值对角速度测量值进行校准,得到第一类角速度输出值。本发明不需要每次都对零偏补偿值进行更新,只有在判断常值零位与上述零偏指标合格判定阈值满足一定的大小关系时,才更新零偏补偿值,节省了时间成本,提高了陀螺仪的工作效率。进一步地,上述零偏指标合格判定阈值可根据实际需求灵活设置,使得校准过程能够适用于更广泛的应用场景。
技术研发人员:张祐齐,李娜,张永斌,汤一,张萌,王森
受保护的技术使用者:北京晨晶电子有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!