一种车辆毫米波角雷达系统的制作方法
本发明涉及本发明涉及智能驾驶汽车领域,尤其涉及一种车辆毫米波角雷达系统。
背景技术:
1、智能驾驶系统是一个集中运用了先进的信息控制技术,剧本环境感知、多等级辅助驾驶等功能于一体的综合系统。智能驾驶系统能够辅助驾驶员进行驾驶,而驾驶员能够在智能系统的一系列提示下,对实际的道路情况做出相应的反应。在智能驾驶系统中,需要对外部环境及驾驶员行为的信息采集。在周边环境的采集以及模型建立、障碍物的探测中,毫米波雷达起到了重要的作用,并在自动泊车、自适应巡航等场景下得到了广泛的运用。随着智能驾驶的快速发展,毫米波雷达由于探测距离远、受环境影响小、成本低、技术成熟,成为自动驾驶辅助系统adas主要的传感器。
2、汽车雷达是用于汽车或其他地面机动车辆的雷达。基于不同技术,可分为激光雷达、超声波雷达、毫米波雷达和微波雷达等,具有发现障碍物、预测碰撞、自适应巡航控制等功能。使用雷达确定环境中物体的距离、速度和角度(仰角或方位角或两者)在许多应用中都很重要,包括汽车雷达和手势检测。雷达系统通常发射射频(rf)信号并侦听环境中物体反射的无线电信号。fcc和其他国际频率分配组织已经为基于消费雷达的设备开放了毫米波区域的频段。现有应用中,70-80ghz范围内的频率可用于中程汽车驾驶员辅助雷达,而61-61.5-ghz范围内的频率可用于短程室内传感器,例如运动传感器或人员计数器和安全设备。
3、现有技术中采用不同的汽车雷达传感器进行特定方式的安装可以形成不同的自动驾驶感知系统,而基于不同的雷达传感器布置的不同雷达系统的精确度也不相同。在彼此距离内的同一频段内独立工作的多个雷达传感器之间可能存在的相互干扰,基于此提出有效减少相互干扰、精度高的雷达传感系统甚为重要。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本发明的目的在于提出一种车辆毫米波角雷达系统,以实现降低多个雷达之间的干扰,解决现有技术中车辆中同一频段内独立工作的多个雷达之间可能存在的相互干扰的技术问题。
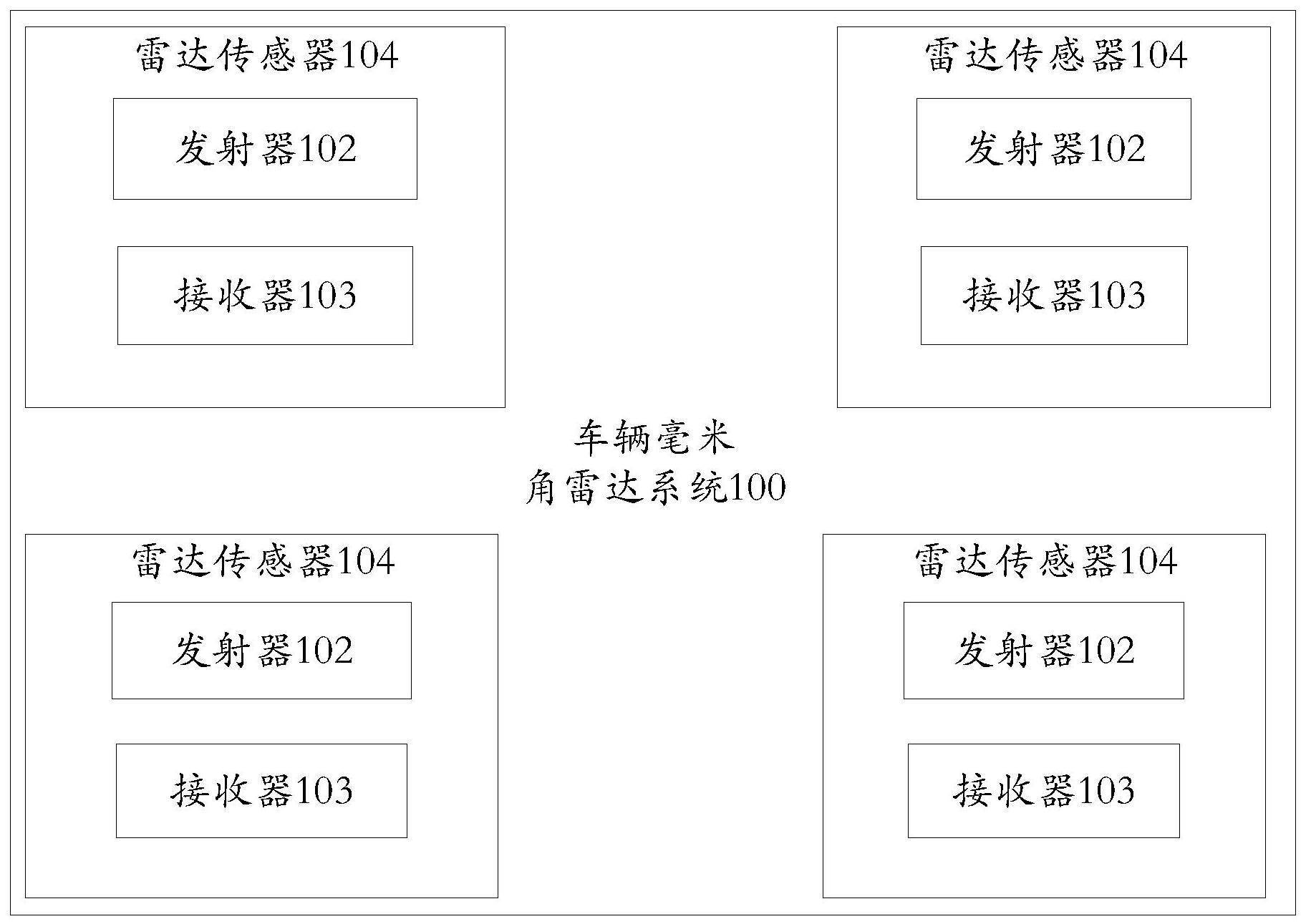
3、为达上述目的,本发明实施例提出了一种车辆毫米波角雷达系统,该包括:多个雷达传感器;其中,所述雷达传感器包括发射器和接收器;
4、所述发射器用于发射探测信号;
5、所述接收器用于接收反馈信号;其中,所述反馈信号包括所述发射器发射并由环境中的物体反射的反射信号和至少一个其他毫米波雷达系统发射的第一探测信号。
6、可选的,所述接收器为双极化接收器;
7、所述双极化接收器用于对所述反射信号和所述第一探测信号进行极化处理,并根据极化差异得到目标信号和干扰信号。
8、进一步可选的,所述双极化接收器根据接收所述反馈信号的方向对所述反馈信号进行分离,得到多个方向分离反馈信号;
9、所述双极化接收器对所述多个方向分离反馈信号进行极化处理,并根据极
10、化差异对多个所述方向分离反馈信号进行分离,得到所述目标信号和所述干扰5信号。
11、进一步可选的,所述系统还包括接收天线阵列;
12、所述接收天线阵列与粗波束形成进行通信连接,用以对所述反馈信号进行方向分离。
13、进一步可选的,所述极化接收器用于对所述反馈信号进行分离,得到多个0频谱分量;
14、所述极化接收器用于对多个所述频谱分量进行极化处理,并根据极化差异对所述多个频谱分量进行分离,得到所述目标信号和所述干扰信号。
15、进一步可选的,所述极化接收器用于将所述反馈信号进行分离,得到多个
16、频谱分量;
17、5所述极化接收器根据接受所述反馈信号的方向对所述频谱分量进行分离,
18、得到多个方向分离频谱分量;
19、所述极化接收器对所述多个方向分离频谱分量进行极化处理,并根据极化差对所述多个方向分离频谱分量进行分离,得到所述目标信号和所述干扰信号。
20、0可选的,所述车辆毫米波角雷达系统的雷达传感器个数为4;
21、所述雷达传感器安装于所述自动驾驶车辆的位置分别为左前角、右前角、左后角和右后角。
22、可选的,所述探测信号的频率p满足条件76ghz≤p≤79ghz。
23、可选的,所述角雷达装置的水平视场角为120°;
24、所述角雷达装置的垂直视场角为30°
25、可选的,所述雷达装置安装于距离地面h高处,所述h满足条件300mm≤h≤1000mm。
26、本发明实施例提供一种车辆毫米波角雷达系统,其采用具有多个具有双极化接收器和接收天线阵列的雷达传感器进行合理布置与车辆上,采用极化接收器对接收到的反馈信号进行分离并进一步根据极化差将目标信号和干扰信号分离开的方式,极大地降低了多个雷达间的相互干扰,提高车辆所需的雷达系统精确度。
27、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种车辆毫米波角雷达系统,应用于自动驾驶车辆,其特征在于,所述系统包括:多个雷达传感器;其中,所述雷达传感器包括发射器和接收器;
2.根据权利要求1所述车辆毫米波角雷达系统,其特征在于,所述接收器为双极化接收器;
3.根据权利要求2所述车辆毫米波角雷达系统,其特征在于,所述双极化接收器根据接收所述反馈信号的方向对所述反馈信号进行分离,得到多个方向分离反馈信号;
4.根据权利要求1所述车辆毫米波角雷达系统,其特征在于,所述系统还包括接收天线阵列;
5.根据权利要求2所述车辆毫米波角雷达系统,其特征在于,所述极化接收器用于对所述反馈信号进行分离,得到多个频谱分量;
6.根据权利要求2所述车辆毫米波角雷达系统,其特征在于,所述极化接收器用于将所述反馈信号进行分离,得到多个频谱分量;
7.根据权利要求1所述车辆毫米波角雷达系统,其特征在于,所述车辆毫米波角雷达系统的雷达传感器个数为4;
8.根据权利要求1所述车辆毫米波角雷达系统,其特征在于,所述探测信号的频率p满足条件76ghz≤p≤79ghz。
9.根据权利要求1所述车辆毫米波角雷达系统,其特征在于,所述角雷达装置的水平视场角为120°;
10.根据权利要求1所述车辆毫米波角雷达系统,其特征在于,所述雷达装置安装于距离地面h高处,所述h满足条件300mm≤h≤1000mm。
技术总结
本发明提供一种车辆毫米波角雷达系统,应用于自动驾驶车辆,该系统包括:多个雷达传感器;其中,所述雷达传感器包括发射器和接收器;所述发射器用于发射探测信号;所述接收器用于接收反馈信号;其中,所述反馈信号包括所述发射器发射并由环境中的物体反射的反射信号和至少一个其他毫米波雷达系统发射的第一探测信号;其中,所述接收器为双极化接收器;所述双极化接收器用于对所述反射信号和所述第一探测信号进行极化处理,并根据极化差异得到目标信号和干扰信号。
技术研发人员:杨文,朱翔,田江伟
受保护的技术使用者:北京深测科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!