一种船载地波雷达目标左右模糊消除方法
本发明涉及船载地波雷达目标测向领域,尤其涉及一种船载地波雷达目标左右模糊消除方法。
背景技术:
1、高频地波雷达,利用3~30mhz高频频段垂直极化电磁波沿海面绕射传播的特性,可实现对海上船只目标的大范围、超视距连续跟踪探测。相对于岸基地波雷达,船载地波雷达可充分利用船载平台机动灵活的特点,不受岸基场地的限制,扩展其探测区域,提高地波雷达的应用范围。相对于通常只接收天线阵一侧的海面回波信号的岸基地波雷达,船载地波雷达的船载平台由于位于空阔的海上,雷达接收天线阵不仅能接收期望的正向右侧探测区域(假设天线阵安装在船舷右侧)的船只目标信号,而且也能够接收到非期望的船舷左侧海域的反向目标信号。对于船载地波雷达,将期望探测的右侧区域的目标称为“正向目标”,则船舷左侧区域的船只目标为“反向目标”。由于左侧反向目标信号到达接收天线的导向矢量会被雷达自动识别为来自期望探测区域信号的导向矢量,使得雷达对该信号测量的方位角位于期望探测区的范围,正、反向目标混淆,无法区分正、反向目标,进而出现目标左右模糊的现象,影响了目标的检测结果和后续的跟踪性能。因此,为提高船载地波雷达目标的探测性能,必须发展船载地波雷达目标左右模糊消除方法。
2、目前,地波雷达目标探测研究中,很少有涉及目标左右模糊消除问题;如岸基雷达类似船载雷达能够接收阵列两侧的目标信号,仅靠岸基地波雷达也难以解决。近年来已有船载地波雷达目标探测相关研究,但大都集中在目标检测方法研究方面,船载地波雷达目标方位估计是默认作为右侧正向目标对待,还未有考虑船载地波雷达目标左右模糊消除问题,目前也尚未见到船载地波雷达目标左右模糊分析与消除方法的研究。本发明结合船载地波雷达的特点,发挥船载平台可以改变航行状态的优势,利用平台不同艏向的目标检测结果,提出了一种适合于船载地波雷达的船只目标左右模糊消除方法,提高对目标的检测性能。
技术实现思路
1、(一)要解决的技术问题
2、本发明的目的是提供一种利用船载地波雷达平台艏向变化前后的目标测向结果来区分位于船载平台左、右侧船只目标的方法,以提高目标检测性能。
3、(二)技术方案
4、本发明包含以下步骤:
5、(1)设定艏向1为获取时刻的船载地波雷达频域数据、姿态数据与点迹探测结果。
6、获取时刻频域数据x1r,d(f)(以距离-多普勒图形式展示),点迹数据point1,包括目标方位角、径向距离、径向速度、经度、经度等信息,并且第k个点迹表示为point1(k);船载平台p的姿态数据包括艏向平台经度lon1p(t)、平台纬度lat1p(t)、航向heading1p(t)和雷达主轴角度rs1(t)(相对于正北,顺时针为正,rs1(t)=heading1p(t)-π/2);其中,t表示时间,r表示地波雷达距离维,r∈[1,rmax],rmax为距离维度单元格数,d表示地波雷达多普勒维,d∈[1,dmax],dmax为多普勒维度单元格数,f表示幅度。
7、(2)根据重点关注区域,确定船载平台艏向调整方向和角度,平台艏向由匀速调整到艏向2,即同步频域数据、姿态数据与点迹探测结果,期间获取艏向调整过程中的频域数据x3r,d(f)。
8、艏向调整包括调整的方向和调整角度的确定,其中,艏向方向的调整是根据在时段内重点关注区域area中所在角度(相对于正北)的平均值ave,与该时刻雷达主轴角度rs1(t)之间的关系,来确定艏向调整的方向是顺时针还是逆时针;
9、艏向调整方向
10、而艏向调整的角度大小β主要参考船载地波雷达的目标方位探测精度α,可以设定为β=1.5α,确保艏向调整大于目标方位探测精度。
11、获取时刻的频域数据x2r,d(f),点迹数据point2;姿态数据中的艏向平台经度lon2p(t)、平台纬度lat2p(t)、航向heading2p(t)和雷达主轴角度rs2(t)。
12、(3)基于艏向调整前、后目标关联的同一目标确定。
13、根据艏向调整过程中的距离-多普勒图中面区域与艏向调整前后目标点迹结果的关系来确定艏向调整前后的目标是否为同一个。
14、面区域检测结果来自频域数据x3r,d(f),其中某一面区域q的速度和距离分布范围分别是[v1,v2]和[r1,r2]。当point1(i)满足:
15、
16、且point2(j)也满足:
17、
18、则说明这两个点迹同时位于面区域q中,因此他们是同一个目标。其中,point1(i).v和point1(i).r分别为时刻目标point1(i)在点迹数据中的径向速度和径向距离,point2(j).v和point2(j).r分别为时刻目标point2(j)在点迹数据中的径向速度和径向距离,i、j分别为第i、j个目标;
19、(4)基于同一目标方位角差值与平台艏向角度差的正反向目标区分。
20、基于(3)得到的每一个同一目标的关联结果,通过和时刻的艏向角差值和方位角差值δpoint.a的相互关系,来区分重点关注区域area中的目标点迹point(k)是正向目标pointz还是反向目标pointf。
21、
22、其中,k为第k个目标,为艏向角差值,δpoint.a为目标方位角差值,δpoint.a=point1(i).a-point2(j).a,point1(i).a是时刻目标point1(i)的方位角,point2(j).a是时刻目标point2(j)的方位角;
23、(5)基于正反向目标识别结果的目标点迹数据更正。
24、更新时刻的点迹数据,其中正向目标pointz信息不发生改变,反向目标pointf的方位角point.α更新为(π-point.a),经度point.lon更新为point'.lon,纬度point.lat更新为point'.lat,更正原则为:
25、
26、
27、其中,point.a、point.lon、point.lat、point.r为时刻目标的方位角、经度、纬度和径向距离,arc是地球半径,单位为km。
28、(三)有益效果
29、本发明的优点体现在:
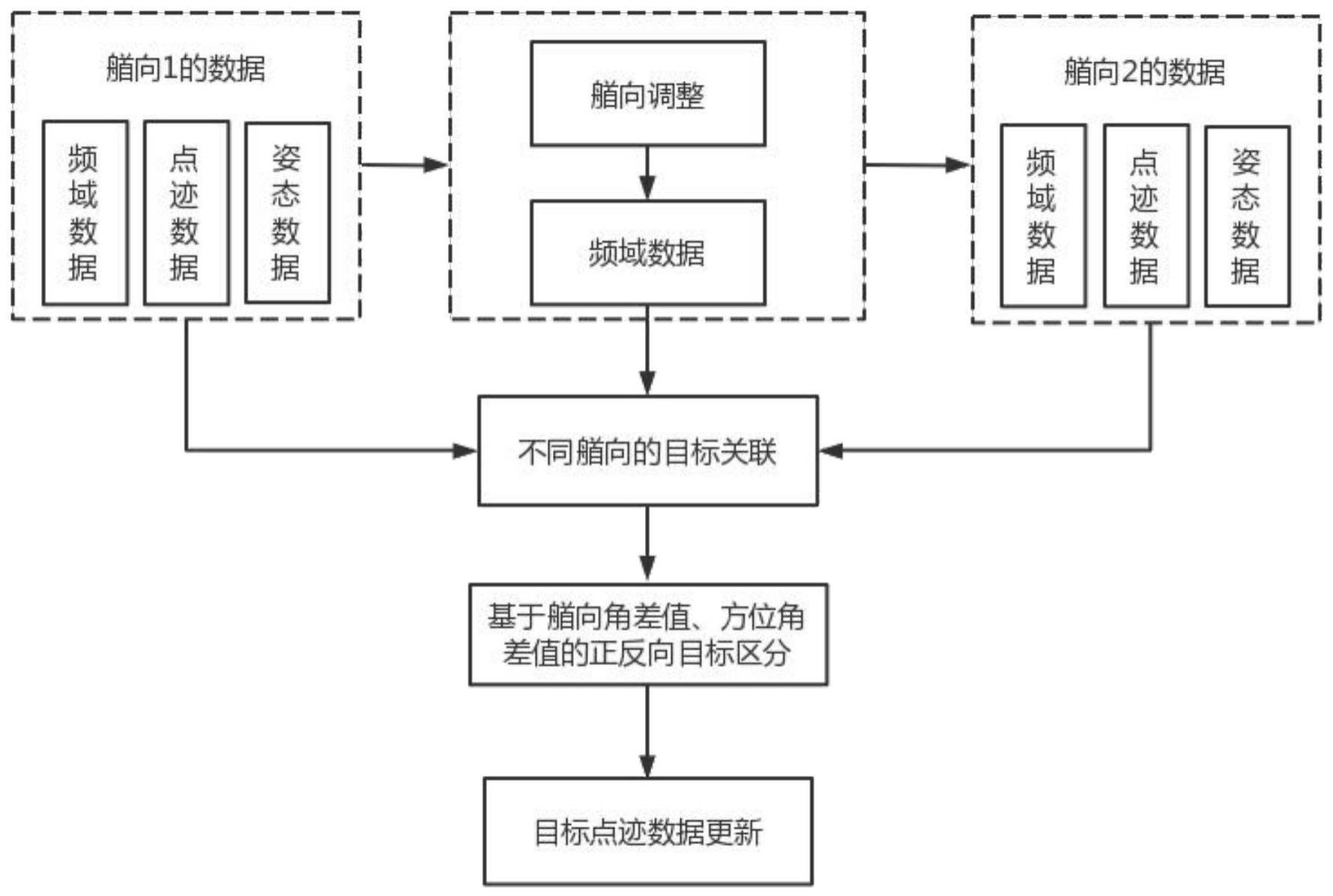
30、本发明提供一种船载地波雷达目标左右模糊消除方法,该方法利用实时获取的雷达点迹数据、频域数据和姿态信息,首先基于平台姿态信息中的不同艏向进行目标关联;然后对关联成功的目标进行不同艏向的方位角估计;最后根据船载平台不同艏向的艏向角差值和目标方位角差值之间的关系,确定正、反向目标,完成目标左右模糊现象的消除。
技术特征:
1.一种船载地波雷达目标左右模糊消除方法,包含以下步骤:
技术总结
本发明公开了一种船载地波雷达目标左右模糊消除方法,涉及船载地波雷达目标测向领域,基本步骤为:获取船载地波雷达频域数据、姿态数据与点迹探测结果;根据重点关注区域,确定船载平台艏向调整方向和角度;艏向调整前、后的目标关联的同一目标确定;同一目标方位角差值与平台艏向角度差的正反向目标区分;正反向目标识别结果的目标点迹数据更正。本发明充分考虑船载平台机动变化对目标测向产生的影响,并根据平台艏向变化会对目标方位角估计产生影响的特点,利用船载平台不同艏向时刻的艏向角差值和方位角差值的关系,实现对正、反向目标的区分,完成了目标左右模糊现象的消除。
技术研发人员:纪永刚,王心玲,李发瑞,李桃利,孙伟峰
受保护的技术使用者:中国石油大学(华东)
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!