一种岸桥下车辆定位方法、装置、电子设备及存储介质与流程
本公开涉及自动驾驶,具体而言,涉及一种岸桥下车辆定位方法、装置、电子设备及存储介质。
背景技术:
1、自动驾驶的车辆行驶的第一步就是需要时刻知道自己的位置,定位位置的精度误差超过10cm,行驶的过程中比较容易出现碰撞,因此定位精度有重要的意义。目前主要使用的融合全球定位系统(global navigation satellite system,gnss)和惯性导航系统(inertial navigation system,ins)。还有利用高精地图辅助定位,随着技术的不断更新,同步定位与地图构建(simultaneous localization and mapping,slam)也较为普遍的应用自动驾驶车辆的定位系统。
2、目前,在岸桥下通常由于全球定位系统(global positioning system,gps)信号差,车辆自身的定位系统无法得到精准定位,即使融合了gnss和ins后定位精度依旧偏差较大,并且slam在岸桥下可以提取的特征也较少,相同在线slam计算资源消耗较大,硬件算力需求更高。
技术实现思路
1、本公开实施例至少提供一种岸桥下车辆定位方法、装置、电子设备及存储介质,可以在岸桥下等定位信号较差的环境中,提升车辆的定位精度。
2、本公开实施例提供了一种岸桥下车辆定位方法,所述方法包括:
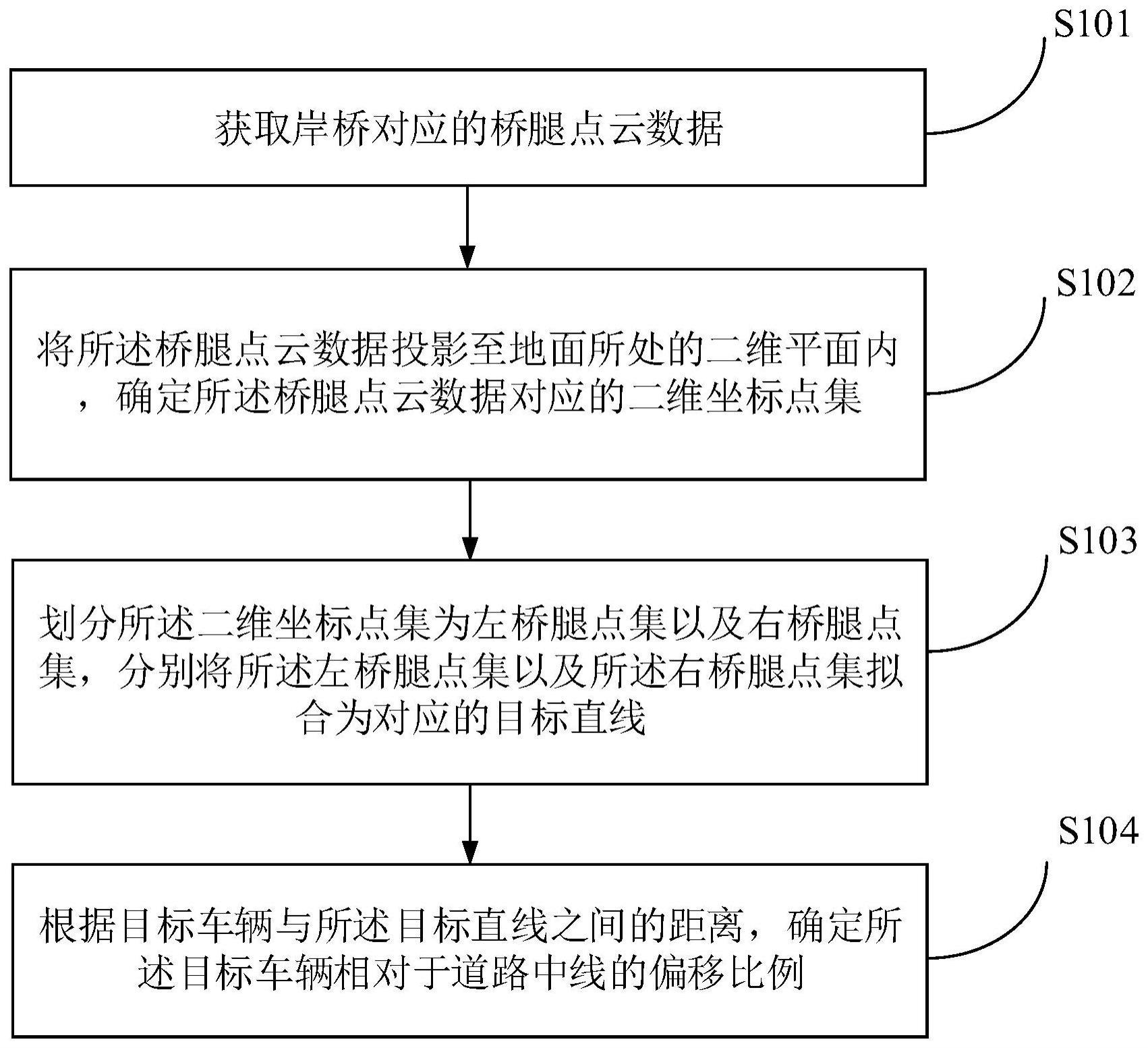
3、获取岸桥对应的桥腿点云数据;
4、将所述桥腿点云数据投影至地面所处的二维平面内,确定所述桥腿点云数据对应的二维坐标点集;
5、划分所述二维坐标点集为左桥腿点集以及右桥腿点集,分别将所述左桥腿点集以及所述右桥腿点集拟合为对应的目标直线;
6、根据目标车辆与所述目标直线之间的距离,确定所述目标车辆相对于道路中线的偏移比例。
7、一种可选的实施方式中,所述获取岸桥对应的岸桥腿点云数据,具体包括:
8、当所述目标车辆驶入所述岸桥下时,通过设置于所述目标车辆车顶的雷达扫描确定所述岸桥对应的岸桥点云数据;
9、过滤所述岸桥点云数据中高度量大于预设阈值的点云数据,确定所述桥腿点云数据。
10、一种可选的实施方式中,在所述过滤所述岸桥点云数据中高度量大于预设阈值的点云数据,确定所述桥腿点云数据之后,所述方法还包括:
11、确定所述雷达对应的雷达坐标系,以及所述目标车辆对应的车辆坐标系之间的坐标系转换关系;
12、根据所述坐标系转换关系,将所述桥腿点云数据由所述雷达坐标系转换至所述车辆坐标系。
13、一种可选的实施方式中,所述将所述桥腿点云数据投影至地面所处的二维平面内,确定所述桥腿点云数据对应的二维坐标点集,具体包括:
14、针对所述桥腿点云数据中的每个点,将该点对应的高度量设置为0,确定所述二维坐标点集。
15、一种可选的实施方式中,基于以下步骤划分所述二维坐标点集为左桥腿点集以及右桥腿点集:
16、确定所述目标车辆所处的道路宽度;
17、在所述车辆坐标系中的横轴方向上,确定所述二维坐标点集中每两个点之间的横向距离,其中,所述横轴方向垂直于所述目标车辆行驶方向;
18、在所述二维坐标点集中,筛选所述横向距离大于所述道路宽度的一半的目标点对集合;
19、根据所述目标点对集合中,各坐标点相对于所述目标车辆的位置关系,将所述目标点对集合划分为所述左桥腿点集以及所述右桥腿点集。
20、一种可选的实施方式中,在所述根据目标车辆与所述目标直线之间的距离,确定所述目标车辆相对于道路中线的偏移比例之后,所述方法还包括:
21、将所述偏移比例输入至预设的导航地图中,并实时更新所述偏移比例;
22、根据所述偏移比例调整所述目标骑车对应的行驶方向,以使所述目标汽车沿所述道路中线行驶。
23、本公开实施例还提供一种岸桥下车辆定位装置,所述装置包括:
24、获取模块,用于获取岸桥对应的桥腿点云数据;
25、投影模块,用于将所述桥腿点云数据投影至地面所处的二维平面内,确定所述桥腿点云数据对应的二维坐标点集;
26、直线拟合模块,用于划分所述二维坐标点集为左桥腿点集以及右桥腿点集,分别将所述左桥腿点集以及所述右桥腿点集拟合为对应的目标直线;
27、定位模块,用于根据目标车辆与所述目标直线之间的距离,确定所述目标车辆相对于道路中线的偏移比例。
28、一种可选的实施方式中,所述装置还包括第二高度确认模块,所述第二高度确认模块用于:
29、本公开实施例还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行上述岸桥下车辆定位方法,或上述岸桥下车辆定位方法中任一种可能的实施方式中的步骤。
30、本公开实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述岸桥下车辆定位方法,或上述岸桥下车辆定位方法中任一种可能的实施方式中的步骤。
31、本公开实施例还提供一种计算机程序产品,包括计算机程序/指令,该计算机程序、指令被处理器执行时实现上述岸桥下车辆定位方法,或上述岸桥下车辆定位方法中任一种可能的实施方式中的步骤。
32、本公开实施例提供的一种岸桥下车辆定位方法、装置、电子设备及存储介质,通过获取岸桥对应的桥腿点云数据;将所述桥腿点云数据投影至地面所处的二维平面内,确定所述桥腿点云数据对应的二维坐标点集;划分所述二维坐标点集为左桥腿点集以及右桥腿点集,分别将所述左桥腿点集以及所述右桥腿点集拟合为对应的目标直线;根据目标车辆与所述目标直线之间的距离,确定所述目标车辆相对于道路中线的偏移比例。可以在岸桥下等定位信号较差的环境中,提升车辆的定位精度。
33、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种岸桥下车辆定位方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述获取岸桥对应的岸桥腿点云数据,具体包括:
3.根据权利要求2所述的方法,其特征在于,在所述过滤所述岸桥点云数据中高度量大于预设阈值的点云数据,确定所述桥腿点云数据之后,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,所述将所述桥腿点云数据投影至地面所处的二维平面内,确定所述桥腿点云数据对应的二维坐标点集,具体包括:
5.根据权利要求3所述的方法,其特征在于,基于以下步骤划分所述二维坐标点集为左桥腿点集以及右桥腿点集:
6.根据权利要求1所述的方法,其特征在于,在所述根据目标车辆与所述目标直线之间的距离,确定所述目标车辆相对于道路中线的偏移比例之后,所述方法还包括:
7.一种岸桥下车辆定位装置,其特征在于,包括:
8.根据权利要求7所述的装置,其特征在于,所述获取模块包括扫描单元以及过滤单元;
9.一种电子设备,其特征在于,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如权利要求1至6中任一项所述的岸桥下车辆定位方法的步骤。
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如权利要求1至6中任一项所述的岸桥下车辆定位方法的步骤。
技术总结
本公开提供了一种岸桥下车辆定位方法、装置、电子设备及存储介质,通过获取岸桥对应的桥腿点云数据;将所述桥腿点云数据投影至地面所处的二维平面内,确定所述桥腿点云数据对应的二维坐标点集;划分所述二维坐标点集为左桥腿点集以及右桥腿点集,分别将所述左桥腿点集以及所述右桥腿点集拟合为对应的目标直线;根据目标车辆与所述目标直线之间的距离,确定所述目标车辆相对于道路中线的偏移比例。可以在岸桥下等定位信号较差的环境中,提升车辆的定位精度。
技术研发人员:洪津津,兰晓松,何贝,刘鹤云,张岩
受保护的技术使用者:北京斯年智驾科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!