一种高精度地图地面要素采集方法及装置与流程
本发明属于增强现实,尤其涉及一种高精度地图地面要素采集方法及装置。
背景技术:
1、在高精度地图制作领域,道路地面要素的采集对于高精地图生产非常重要,其直接影响着制图效率和成本管控。目前,地面要素外业数据采集工作主要是由采集车辆的雷达和车载摄像头来获取道路信息,对于已采集道路数据的更新,采集车往往需要频繁转场进行道路全量数据采集,而道路地面要素往往更新频繁,使用采集车辆不仅采集成本高,而且地图更新响应慢。
技术实现思路
1、有鉴于此,本发明实施例提供了一种高精度地图地面要素采集方法及装置,用于解决高精度地图地面要素采集成本高、地图更新慢的问题。
2、在本发明实施例的第一方面,提供了一种高精度地图地面要素采集方法,包括:
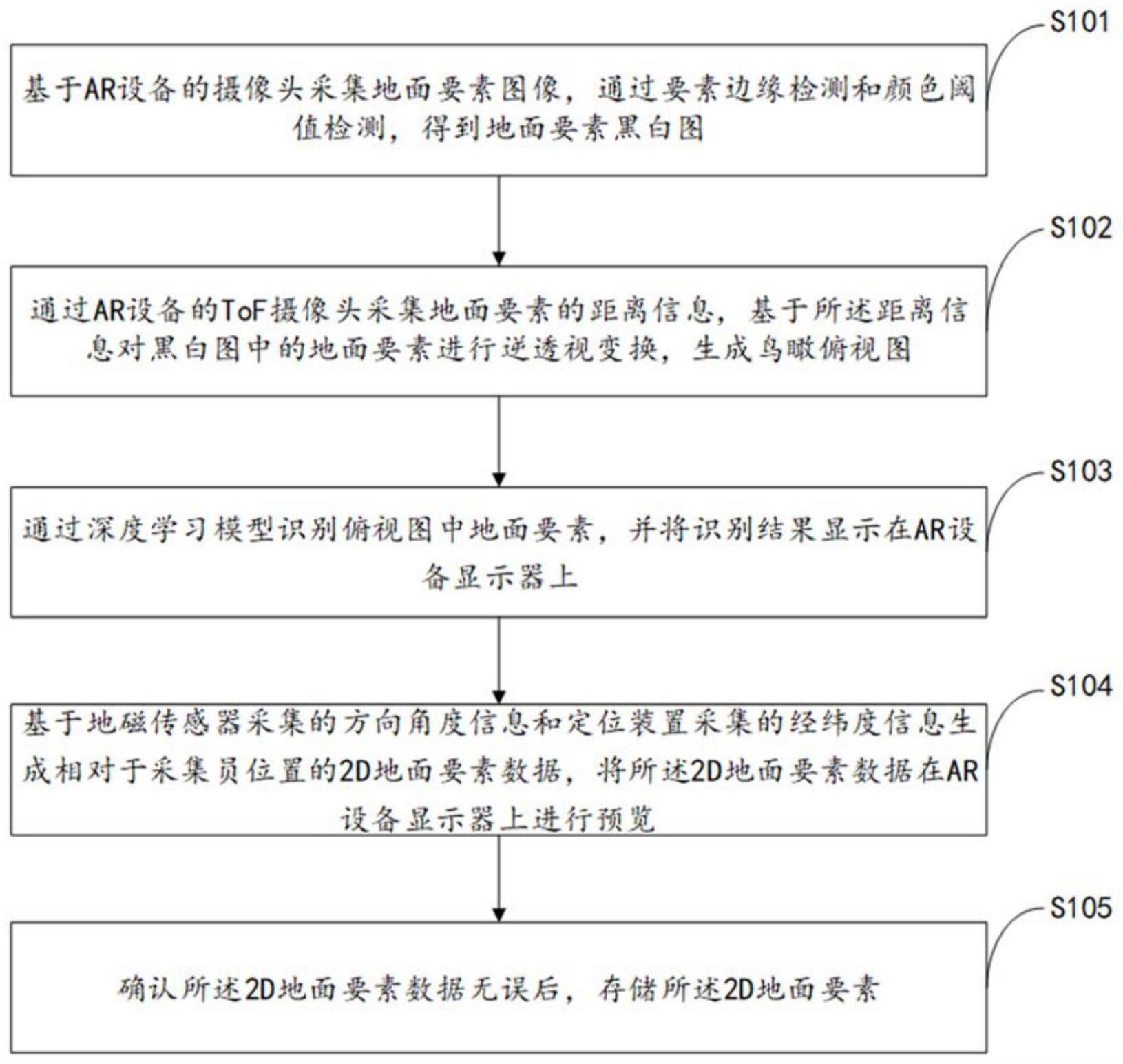
3、基于ar设备的摄像头采集地面要素图像,通过要素边缘检测和颜色阈值检测,得到地面要素黑白图;
4、通过ar设备的tof摄像头采集地面要素的距离信息,基于所述距离信息对黑白图中的地面要素进行逆透视变换,生成鸟瞰俯视图;
5、通过深度学习模型识别俯视图中地面要素,并将识别结果显示在ar设备显示器上;
6、基于地磁传感器采集的方向角度信息和定位装置采集的经纬度信息生成相对于采集员位置的2d地面要素数据,将所述2d地面要素数据在ar设备显示器上进行预览;
7、确认所述2d地面要素数据无误后,存储所述2d地面要素。
8、在本发明实施例的第二方面,提供了一种高精度地图地面要素采集装置,包括:
9、vr设备,用于基于ar设备中的摄像头采集地面要素图像,通过要素边缘检测和颜色阈值检测,得到地面要素黑白图;基于ar设备中的tof摄像头采集地面要素的距离信息,基于所述距离信息对黑白图中的地面要素进行逆透视变换,生成鸟瞰俯视图;通过深度学习模型识别俯视图中地面要素,并将识别结果显示在ar设备显示器上;基于ar设备中的地磁传感器采集的方向角度信息和定位模块采集的经纬度信息生成相对于采集员位置的2d地面要素数据,将所述2d地面要素数据在ar设备显示器上进行预览;确认所述2d地面要素数据无误后,存储所述2d地面要素;
10、定位模块,用于采集当前位置的经纬度信息。
11、在本发明实施例的第三方面,提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器运行的计算机程序,所述处理器执行所述计算机程序时实现如本发明实施例第一方面所述方法的步骤。
12、在本发明实施例的第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现本发明实施例第一方面提供的所述方法的步骤。
13、本发明实施例中,基于vr设备实地采集高精度地图地面要素,实现地面要素的灵活采集,不仅采集效率高、成本低,能有效提高地图更新效率,而且能够实时显示采集结果,方便人工确认验证,可以有效避免重采样。
技术特征:
1.一种高精度地图地面要素采集方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述识别结果包括地面要素的外接矩形框和文字描述。
3.根据权利要求1所述的方法,其特征在于,所述存储所述2d地面要素还包括:
4.一种高精度地图地面要素采集装置,其特征在于,至少包括:
5.根据权利要求4所述的装置,其特征在于,所述识别结果包括地面要素的外接矩形框和文字描述。
6.根据权利要求4所述的装置,其特征在于,所述存储所述2d地面要素还包括:
7.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至3任一项所述的一种高精度地图地面要素采集方法的步骤。
8.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被执行时实现如权利要求1至3任一项所述的一种高精度地图地面要素采集方法的步骤。
技术总结
本发明提供一种高精度地图地面要素采集方法及装置,该方法包括:基于AR设备的摄像头采集地面要素图像,通过要素边缘检测和颜色阈值检测,得到地面要素黑白图;通过AR设备的ToF摄像头采集地面要素的距离信息,基于所述距离信息对黑白图中的地面要素进行逆透视变换,生成鸟瞰俯视图;通过深度学习模型识别俯视图中地面要素,并将识别结果显示在AR设备显示器上;基于地磁传感器采集的方向角度信息和定位装置采集的经纬度信息生成相对于采集员位置的2D地面要素数据,将所述2D地面要素数据在AR设备显示器上进行预览;确认所述2D地面要素数据无误后,存储所述2D地面要素。通过该方案可以提高地面要素采集效率、降低采集成本,便于地图快速更新。
技术研发人员:高维,郭杨斌,罗跃军
受保护的技术使用者:武汉中海庭数据技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!