一种使用单激光束测量风机塔筒径向振动形状方法与流程
1.本发明涉及风机振动监测技术领域,具体涉及一种使用单激光束测量风机塔筒径向振动形状方法。
背景技术:
2.风机塔筒是风力发电机组主要部件之一,起到支撑上部结构和吸收振动能量的重要作用。在风力作用下,塔筒振动过大会影响风力发电机组的整体稳定性。因此,对风机塔筒进行振动测量和动力特性分析至关重要。
3.目前,相比于传统接触式传感器,使用扫描式激光测振仪测量风机塔筒振动响应具有非接触、分布式和高精度的优势。然而,常规二维激光测振仪由于只配备单一激光发射头,因此只能通过单激光束扫描获取测量区域内结构在一个固定方向上的振动形状,无法测量风机塔筒径向振动形状。相比之下,三维激光扫描测振仪配备三个激光发射头,可通过三个激光束同步扫描测量风机塔筒径向振动形状,但是存在价格昂贵、操作繁琐等缺点。
技术实现要素:
4.为解决上述问题,本发明提出了一种使用单激光束测量风机塔筒径向振动形状方法,该方法仅使用单激光束即可量测风机塔筒径向振动形状。
5.为实现上述目的,本发明提供了如下的技术方案。
6.一种使用单激光束测量风机塔筒径向振动形状方法,包括以下步骤:
7.构造风机塔筒正对中心轴的单激光束扫描区域;
8.使用定频简谐力激励风机塔筒,并使用单激光束扫描该区域,获取各测点速度稳态响应;
9.根据各测点速度稳态响应计算各测点的频谱;根据各测点频谱在频率等于激励频率下幅值最大的实部或虚部,获取风机塔筒激光正向振动形状;
10.构造风机塔筒振动形状修正矩阵,将风机塔筒激光正向振动形状修正为径向振动形状。
11.优选地,所述构造风机塔筒正对中心轴的单激光束扫描区域,包括以下步骤:
12.将二维扫描式激光测振仪的激光发射头正对风机塔筒中心轴,以此方向为激光正向,由此建立正对中心轴单激光束扫描区域;
13.其中,风机塔筒中心轴与激光发射头构成的平面将正对中心轴单激光束扫描区域沿周向等分为两部分。
14.优选地,所述风机塔筒激光正向振动形状的获取,包括以下步骤:
15.使用简谐力激励风机塔筒,其激励频率为f0;
16.使用单激光束扫描获取各测点速度稳态响应w[x,y,t],其中t为时间,x和y分别表示扫描区域沿周向和轴向的测点坐标;
[0017]
计算w[x,y,t]的频谱其中f为频率,根据各测点频谱在频率f=f0下
的实部或虚部的幅值最大值,获取风机塔筒激光正向振动形状wn[x,y]。
[0018]
优选地,所述构造风机塔筒振动形状修正矩阵,包括以下步骤:
[0019]
根据正对中心轴单激光束扫描区域构造风机塔筒振动形状修正矩阵:
[0020][0021]
其中,θ为激光束与激光正向的夹角。
[0022]
优选地,所述将风机塔筒激光正向振动形状修正为径向振动形状,包括以下步骤:
[0023]
将风机塔筒激光正向振动形状wn[x,y]与修正矩阵c[x,y]进行点乘,得到径向振动形状:
[0024]
wr[x,y]=wn[x,y]
·
c[x,y]。
[0025]
本发明的有益效果:
[0026]
本发明提出一种使用单激光束测量风机塔筒径向振动形状方法,常规二维激光测振仪器由于只配备单一激光发射头,因此只能通过单激光束扫描获取测量区域内结构在一个固定方向上的振动形状,无法获取风机塔筒径向振动形状,本发明公开的技术能通过振动形状修正的方法,仅使用单激光束即可量测风机塔筒径向振动形状。
附图说明
[0027]
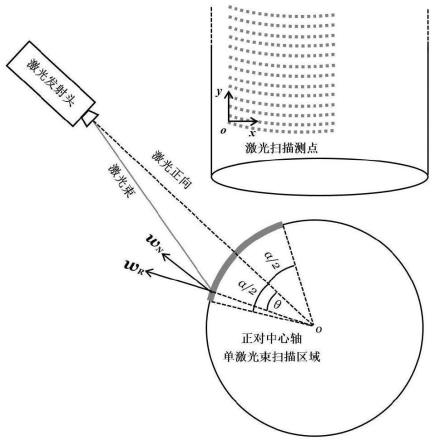
图1是本发明实施例的风机塔筒正对中心轴单激光束扫描区域示意图;
[0028]
图2是本发明实施例的风机塔筒模型图;
[0029]
图3是本发明实施例的风机塔筒激光正向振动形状图;
[0030]
图4是本发明实施例的风机塔筒振动形状修正矩阵图;
[0031]
图5是本发明实施例的风机塔筒径向振动形状图。
具体实施方式
[0032]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0033]
实施例1
[0034]
本发明的一种使用单激光束测量风机塔筒径向振动形状方法,如图1-5所示,包括以下步骤:
[0035]
s1:建立风机塔筒正对中心轴单激光束扫描区域,获取激光正向振动形状。
[0036]
i.参阅图1,将二维扫描式激光测振仪的激光发射头正对风机塔筒中心轴,以此方向为激光正向,由此建立正对中心轴单激光束扫描区域。风机塔筒中心轴与激光发射头构成的平面将正对中心轴单激光束扫描区域沿周向等分为两部分。
[0037]
ii.使用定频简谐力激励风机塔筒,其激励频率为f0;同时,使用单激光束扫描获取各测点速度稳态响应w[x,y,t],其中t为时间,x和y分别表示扫描区域沿周向和轴向的测点坐标。计算w[x,y,t]的频谱其中f为频率。由各测点频谱在频率的实部或虚部幅值最大者,获取风机塔筒激光正向振动形状wn[x,y]。
[0038]
s2:构造风机塔筒振动形状修正矩阵,将风机塔筒“激光正向”振动形状修正为径向振动形状。
[0039]
i.根据“正对中心轴”单激光束扫描区域构造风机塔筒振动形状修正矩阵其中θ为激光束与激光正向的夹角。
[0040]
ii.将风机塔筒激光正向振动形状wn[x,y]与修正矩阵c[x,y]进行点乘,得到径向振动形状wr[x,y]=wn[x,y]
·
c[x,y]。
[0041]
本实施例中,激光传感器为德国polytec公司生产的psv-400激光扫描测振仪;力激励器为丹麦b&k公司生产的4890模态激振器。
[0042]
如图2所示,实施例选用钢制风机塔筒模型作为实施例试件,风机塔筒模型高300mm,外径300mm,厚8mm,底部焊接在一块厚10mm的正方形钢板上,在其四个角处通过螺栓固定在隔振台。
[0043]
根据s1将二维扫描式激光测振仪的激光发射头正对风机塔筒模型中心轴,以此方向为激光正向,由此建立正对中心轴单激光束扫描区域。风机塔筒中心轴与激光发射头构成的平面将正对中心轴单激光束扫描区域沿周向等分为两部分。扫描区域距离试件底部70mm,其沿周向长度l
x
和轴向长度ly均为160mm。通过电磁激振器对试件径向施加简谐激励,同时使用激光测振仪获取正对中心轴单激光束扫描区域各测点的稳态速度响应w[x,y,t]。激励频率选取风机塔筒模型前四阶弯曲模态的自然频率,分别为12.50、63.75、100.63和258.75hz。
[0044]
使用离散傅里叶变换,计算各测点w[x,y,t]的频谱由各测点频谱在所选激励频率下的实部获取风机塔筒模型激光正向振动形状wn[x,y],如图3所示。需要说明,图3中令wn[x,y]幅值绝对值最大值为单位1,同时其x和y坐标分别进行归一化,
[0045]
进一步的,根据s2由正对中心轴单激光束扫描区域,确定各测点列对应激光束与激光正向的夹角θ,由此构造风机塔筒振动形状修正矩阵如图4所示。需要说明,图4中c[x,y]的x和y坐标分别进行归一化,将风机塔筒激光正向振动形状wn[x,y]与修正矩阵c[x,y]进行点乘,得到径向振动形状wr[x,y],如图5所示。需要说明,图5中令wr[x,y]幅值绝对值最大值为单位1,同时其x和y坐标分别进行归一化,通过与风机塔筒模型有限元模态分析得到的振型比较,通过本发明得到的径向振动形状与对应振型在测量区域的形状一致。
[0046]
因此,本发明提出的一种使用单激光束测量风机塔筒局部区域径向振动变形方法仅使用单激光束即可量测风机塔筒径向振动形状。
[0047]
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所做的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1