一种风廓线确定方法及装置与流程
本发明涉及气象雷达,具体涉及一种风廓线确定方法及装置。
背景技术:
1、目前,有两种常用的微波遥感测风雷达,分别是:风廓线雷达与多普勒天气雷达。风廓线雷达与多普勒天气雷达均是利用多普勒效应来获得探测范围内的风向、风速等气象要素随高度的变化情况,但风廓线雷达与多普勒天气雷达在实现方式上有所不同。
2、风廓线雷达,采用五波束固定指向扫描,采取一发一收的形式,每完全获取五个探测波束对应的数据信息后,便对对应的五个探测波束数据信息进行数据处理,以获得一条完整的风廓线所对应的风廓线数据,每组风廓线生成的时间间隔为5-6分钟。
3、多普勒天气雷达,在vcp21体扫模式下,以多个固定仰角进行方位扫描,每个仰角对应360个径向方位,每个径向方位对应一组回波数据。通常以扫描完成9个固定仰角为一个探测周期,每完全获取一个探测周期所对应的数据信息后,便对获取的数据信息进行数据处理,以获得一条完整的风廓线所对应的风廓线数据,每组风廓线生成的时间间隔为6分钟左右。
4、不管是风廓线雷达还是多普勒天气雷达,生成风廓线的时间间隔均为5-6分钟,该时间分辨率较长,不适用于捕捉瞬时风。
技术实现思路
1、因此,本发明要解决现有技术中风廓线生成的时间分辨率较长的技术问题,从而提供一种风廓线确定方法及装置。
2、根据第一方面,本发明实施例提供了一种风廓线确定方法,包括如下步骤:
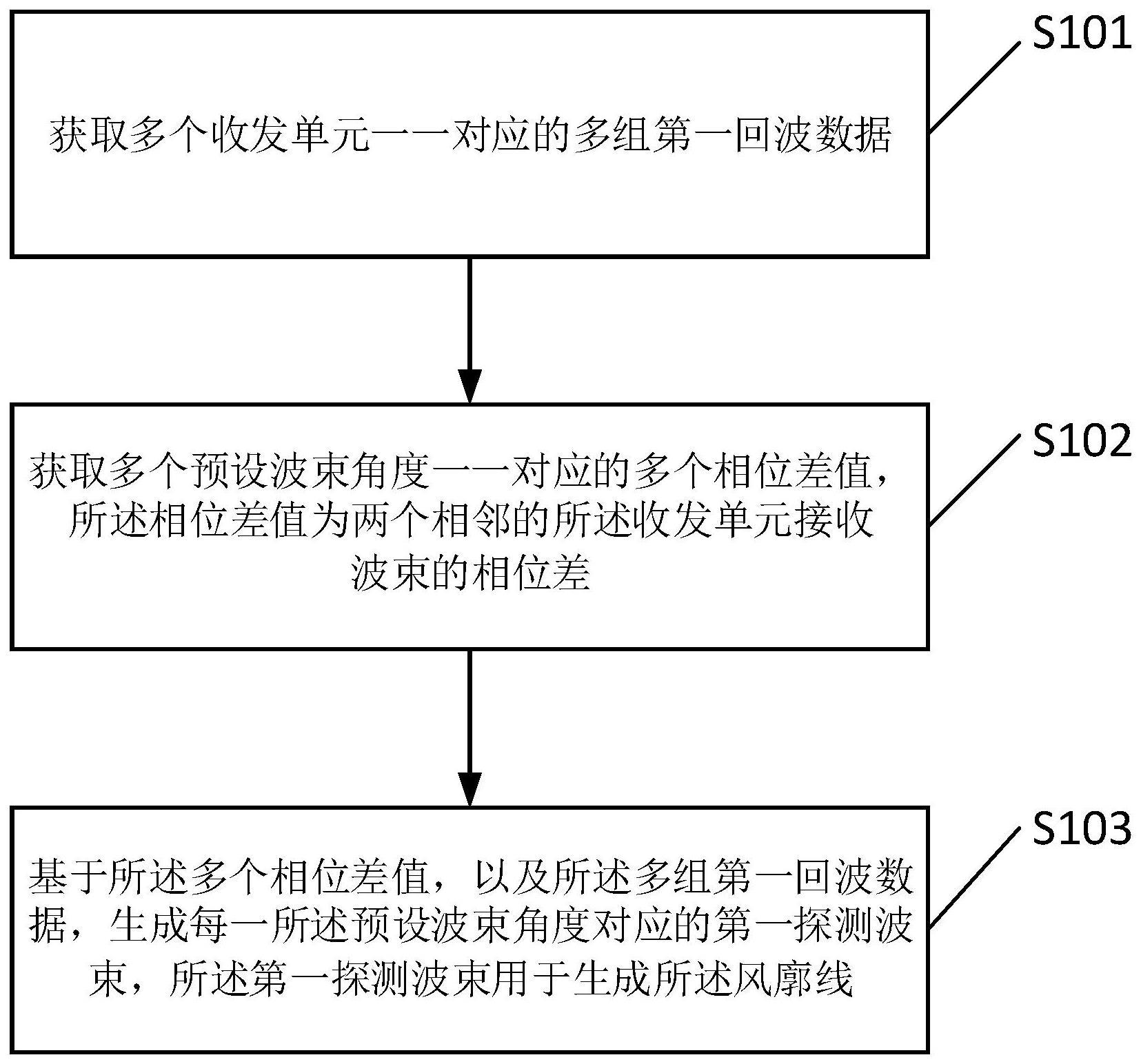
3、获取多个收发单元一一对应的多组第一回波数据;
4、获取多个预设波束角度一一对应的多个相位差值,所述相位差值为两个相邻的所述收发单元接收波束的相位差;
5、基于所述多个相位差值,以及所述多组第一回波数据,生成每一所述预设波束角度对应的第一探测波束,所述第一探测波束用于生成所述风廓线。
6、可选地,风廓线确定方法还包括:
7、获取多个收发单元一一对应的多组第二回波数据,所述第一回波数据与所述第二回波数据为探测同一目标区域的不同高度范围所对应的回波数据;
8、基于所述多个相位差值,以及所述多组第二回波数据,生成每一所述预设波束角度对应的第二探测波束;
9、根据同一所述预设波束角度对应的所述第一探测波束与所述第二探测波束,生成第一合成波束;
10、基于多个所述第一合成波束生成所述风廓线。
11、可选地,风廓线确定方法还包括:
12、获取每一所述预设波束角度对应的历史探测波束,所述历史探测波束与所述第一探测波束为探测同一目标区域的不同高度范围所对应的回波波束;
13、根据同一所述预设波束角度对应的所述第一探测波束与所述历史探测波束,生成第二合成波束;
14、基于多个所述第二合成波束生成所述风廓线。
15、可选地,所述基于所述多个相位差值,以及所述多组第一回波数据,生成每一所述预设波束角度对应的第一探测波束,包括:
16、将每个收发单元对应的所述第一回波数据均按照所述相位差值进行移相计算,获得每个收发单元对应的移相后的第一回波数据;
17、将所述每个收发单元对应的所述移相后的第一回波数据进行加权,获得所述预设波束角度对应的所述第一探测波束。
18、可选地,所述获取多个收发单元一一对应的多组第一回波数据之前,还包括:
19、分别配置每个所述收发单元的发射相位与发射幅度,其中,每个所述收发单元的发射幅度均为预设定值,发射相位根据预设关系函数进行设置。
20、可选地,生成每一所述预设波束角度对应的所述第一探测波束或第二探测波束之后,还包括:
21、对所述第一探测波束或所述第二探测波束进行数据处理,所述数据处理包括相干积累、fft变换、谱平均。
22、可选地,所述对所述第一探测波束或所述第二探测波束进行数据处理之后,还包括:
23、剔除所述第一探测波束或所述第二探测波束中不满足信噪比预设阈值的数据;
24、同时,剔除所述第一探测波束或所述第二探测波束中不满足预设径向速度的数据;
25、同时,根据边缘判别法剔除所述第一探测波束或所述第二探测波束中的无效数据。
26、根据第二方面,本发明实施例提供了一种风廓线确定装置,包括:
27、第一获取模块,用于获取多个收发单元一一对应的多组第一回波数据;
28、第二获取模块,用于获取多个预设波束角度一一对应的多个相位差值,所述相位差值为两个相邻的所述收发单元接收波束的相位差;
29、处理模块,用于基于所述多个相位差值,以及所述多组第一回波数据,生成每一所述预设波束角度对应的第一探测波束,所述第一探测波束用于生成所述风廓线。
30、根据第三方面,本发明实施例提供了一种计算机设备,包括:存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行上述的风廓线确定方法。
31、根据第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使所述计算机执行上述的风廓线确定方法。
32、本发明技术方案,具有如下优点:
33、1、本发明实施例中,采用多个收发单元,一次接收多组第一回波数据,根据接收的多组第一回波数据进行进一步数据处理,即可生成多个预设波束角度一一对应的第一探测波束,不仅节省了不同角度波束采集与生成的时间,也节省了每组风廓线生成的时间,从而提高了风廓线生成的时间分辨率,进而有利于捕捉瞬时风。
34、2、本发明实施例中,将接收的不同探测高度的第一回波数据与第二回波数据进行融合,生成一组高度范围更广的第一合成波束,利用多个生成的第一合成波束可以生成风廓线数据,利用生成风廓线所需的数据再进一步反演出可视化风廓线。利用两次回波数据高度融合的方法,提高了风廓线的覆盖高度。
35、3、本发明实施例中,在生成多个预设波束角度一一对应的多个第一探测波束后,直接获取多个预设波束角度一一对应的多个历史探测波束,将同一预设波束角度对应第一探测波束与历史探测波束进行融合,即可快速获得探测高度范围更广的第二合成波束,进一步提高风廓线生成的时间分辨率。
技术特征:
1.一种风廓线确定方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的风廓线确定方法,其特征在于,还包括:
3.根据权利要求1所述的风廓线确定方法,其特征在于,还包括:
4.根据权利要求1所述的风廓线确定方法,其特征在于,所述基于所述多个相位差值,以及所述多组第一回波数据,生成每一所述预设波束角度对应的第一探测波束,包括:
5.根据权利要求1所述的风廓线确定方法,其特征在于,所述获取多个收发单元一一对应的多组第一回波数据之前,还包括:
6.根据权利要求2所述的风廓线确定方法,其特征在于,生成每一所述预设波束角度对应的所述第一探测波束或第二探测波束之后,还包括:
7.根据权利要求6所述的风廓线确定方法,其特征在于,所述对所述第一探测波束或所述第二探测波束进行数据处理之后,还包括:
8.一种风廓线确定装置,其特征在于,包括:
9.一种计算机设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使所述计算机执行权利要求1-7任一项所述的风廓线确定方法。
技术总结
本发明提供了一种风廓线确定方法、装置,该方法包括:获取多个收发单元一一对应的多组第一回波数据;获取多个预设波束角度一一对应的多个相位差值,所述相位差值为两个相邻的所述收发单元接收波束的相位差;基于所述多个相位差值,以及所述多组第一回波数据,生成每一所述预设波束角度对应的第一探测波束,所述第一探测波束用于生成所述风廓线。该确定方法不仅节省了不同角度波束采集与生成的时间,也节省了每组风廓线生成的时间,从而提高了风廓线生成的时间分辨率,进而有利于捕捉瞬时风。
技术研发人员:周文杰,卫楠,陈俊,王斯正,周亭亭,刘博韬,郑秀明,郝晶
受保护的技术使用者:航天新气象科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!