一种基于动态分辨率的多步DTOF测距方法与流程
本发明属于集成电路,特别是涉及一种基于动态分辨率的多步dtof测距方法。
背景技术:
1、半导体及单光子雪崩二极管spad为single-photon-avalanche-diode,随着spad的技术进步,dtof技术由于其在长距离,复杂背景光环境下测距精度高,抗干扰性强及动态响应快等特点,相较于其他飞行时间tof技术,有较强的竞争优势。但是由于其采用时间相关的单光子计数(tcspc)技术,需要通过直方图统计特性获得目标距离信息,对直方图rambins深有很大的需求,比如测距目标范围为15m,测距bin的最小精度1.5cm,需要的ram深度为15m/0.015=1000bins,再考虑12bits peak计数,对应的ram大小为12x1024(考虑地址寻址取2n整数),若需要更远测距范围,或更高测距精度,相应地该ram会更大;这种情况在面阵阵列中尤为严重,这就导致其芯片实现上ram的面积,功耗等成为芯片的成本,性能的主要限制因素。
2、针对上述问题,本技术方案提出了多步调整分辨率来减少对ram bin需求的测距方法。该发明采用k(k>=2)步dtof测距法,在软件的灵活控制下,实现对测距直方图ram的压缩,能达到常规实现ram的1/nk-1大小(n为实现中的实际bin深),即n bins的深度能实现nk bins的等效效果。
3、该多步测距方法对于k>=2均适用,为了便于描述,接下来的具体叙述中我们仅考虑k=2的情况。
技术实现思路
1、本发明提供了一种基于动态分辨率的多步dtof测距方法,解决了以上问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
3、一个具体的测距过程,是通过两步或以上步骤实现的;
4、本技术方案以一个两步测距作为具体讲解,做如下设定:
5、设直方图ram的bins数量为n,n=2n=23=8,可以其它任何正整数,不限范围,但大的n意味大的bin数量,更远的测距,更大的ram(芯片面积,功耗等),具体需要设计权衡;本实施中,n选择为正整数3;
6、测距范围r bins,r=n*n=n2=22n=26=64;
7、tdc计数器位宽k,k=2n=6;在所有测距步骤中,计数器位宽保持不变,即tdc精度保持不变。
8、本发明的一种基于动态分辨率的多步dtof测距方法,包括如下步骤:
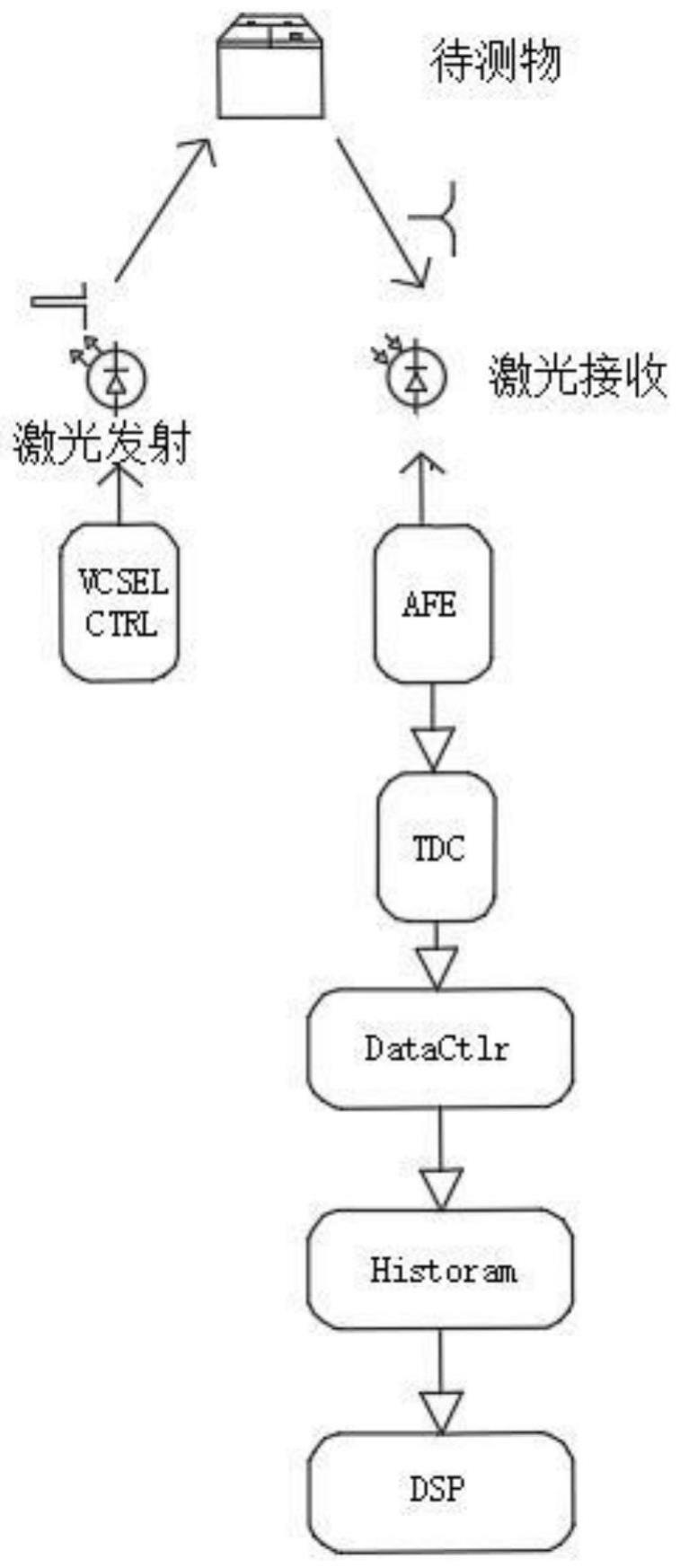
9、s1、通过从粗分辨率到细分辨率的逐级调整及从粗到细地逐步提高定位目标位置精度:通过距离精度控制器将测距精度调整到低,即舍弃tdc计数器的低n bits,仅将高nbits cnt[2n-1:n]送入直方图,以覆盖整个目标测距范围,从而获得待测物体的大概范围,该距离值作为最终测距的高n位值;经过数字信号分析,设最后的待测物体bin值为nmsb;
10、s2、通过调整距离精度控制器,仅接收上述步骤中选定的高位值信息,即只有tdc高n bits的值为nmsb,才将低n bits cnt[n-1:0]计数值送入直方图统计;由dsp分析该直方图统计信息,获得目标范围内更高精度待测物体位置信息,该位置信息设为nlsb,作为最终测距值的低n bits;
11、s3、将s1步骤和s2步骤所获得的高低n bits数据合并,得到最终的2n bits距离值{nmsb,nlsb}。
12、进一步地,所述s1步骤中的逐级调整至少为两步。
13、进一步地,所述分辨率包括单像素、阵列像素。
14、本发明相对于现有技术包括有以下有益效果:
15、(1)本发明的一种基于动态调整分辨率,通过将待测物体的测距过程分解为从粗到细的多步实现,从而减少对直方图ram的需求;
16、(2)本发明通过初始较粗的精度,获取待测物的较粗的距离范围;在此基础上,再通过后续更精细的定位,逐步获得待测物精细位置;
17、(3)基于本发明的技术,通过k步测距,用k倍的测距时间,获得了nk-1倍的测距精度,亦即用n bins的ram深度,获得了nk bins的效果;
18、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种基于动态分辨率的多步dtof测距方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于动态分辨率的多步dtof测距方法,其特征在于,所述s1步骤中的逐级调整至少为两步。
3.根据权利要求1所述的一种基于动态分辨率的多步dtof测距方法,其特征在于,所述分辨率包括单像素、阵列像素。
技术总结
本发明公开了一种基于动态分辨率的多步DTOF测距方法,是从初步检测到目标到针对目标做高精度定位的一种多步测量方法,从而以较少的直方图RAM bin数量,获得传统一次测距所需要大量直方图RAM bin的效果;在时间数字转换器TDC计数精度保持不变,对于一块深度为N的直方图RAM,如果进行两步测距,可以实现N*N=N<supgt;2</supgt;个bins的测距深度;如果进行三步测距,则可以实现N*N*N=N<supgt;3</supgt;个bins的测距深度;这是一种以k(k>=2)倍时间成本换取1/N<supgt;k‑1</supgt;倍更少直方图RAM资源的方法,从而指数级地减少了所需直方图RAM的大小,对DTOF芯片,尤其是大面阵的DTOF芯片的面积,功耗有很大的改善。
技术研发人员:李高志,江建明,朱健军,张睿轶
受保护的技术使用者:上海矽印科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!