一种基于规则与FasterRCNN模型联合的航迹起始方法
本发明属于目标跟踪,尤其涉及一种基于规则与fasterrcnn模型联合的航迹起始方法。
背景技术:
1、目标跟踪是主体通过各种观测手段和计算方法,对客体运动的状态建模、估计跟踪的过程。从此概念提出以来其研究成果已经广泛应用于军事领域和民用领域,军用领域包括导弹拦截、飞行器侦查和追踪、预警突防、战场实时监控等。民用领域涵盖地面人体跟踪、交通监管、空中客机管制、海域航船监测及当下比较热门的无人车辆驾驶、计算机视觉方面的人脸识别,手势跟踪等。雷达凭借其全天候的工作状态,成为了战略防御系统的重要传感器之一,基于雷达回波点的目标跟踪也成为了备受关注的技术手段。
2、航迹起始是目标跟踪任务中的第一步,它是指从雷达探测到的回波信号中确立存在航迹的过程,是目标跟踪的首要前提和关键任务。如果航迹不能正确起始,不仅会影响目标数目的确定,更有可能会造成目标丢失,对航迹跟踪维持乃至后续的态势评估等任务带来极大的影响。经典的航迹起始方法大概分为两类,一类是以直观法、逻辑法为代表的顺序处理方法,另一类是以hough变化及其改进方法为代表的批处理方法。
3、顺序处理方法主要思路是依据时间序列处理回波,以第一个周期的所有回波作为航迹头,与接下来的回波进行组合,设置相关的速度、加速度、角度等等作为约束条件并设立波门,来判断和限制航迹的生成,并集成卡尔曼滤波和确定起始的逻辑,能够用于跟踪的全过程,较为简单直观。
4、批处理的方法则是将多个周期的回波数据叠加在雷达视域中,以图像处理中的hough线检测的思路从空间维度上找寻可能存在的航迹,可以避免顺序处理时组合爆炸的问题。两种方法各有优劣,均在正确起始的航迹和虚假起始的航迹之间求取平衡,以更快更准地起始航迹。
5、随着雷达探测环境的复杂化,现行航迹起始方法实际应用中对经验知识依赖较强,这导致其泛化能力弱,对环境变化的自适应能力差,容易出现航迹断批、虚假航迹等问题。例如,在顺序处理方法中,因为需要判断当前时刻每一个回波点与前后时刻回波点是否满足设定的约束关系,在密集杂波环境下往往会带来组合爆炸的问题,并且会由于在先验约束中的超参数设置未必符合真实场景,会起始出大量的虚假航迹。批处理方法也是如此,尽管叠加多个时刻的回波可以避免密集杂波环境下的组合爆炸问题,但其算法原理是利用图中点迹的直线关系来起始航迹,在存在量测噪声时同样会因不易选取划分空间的参数而变得棘手,常会引发许多虚假航迹出现,同时基于hough变化的方法往往会出现航迹簇拥的问题。
技术实现思路
1、本发明的目的是提供一种基于规则与fasterrcnn模型联合的航迹起始方法,兼顾顺序处理和批处理方法的优点,实现降低虚假起始率,提高目标航迹起始的性能。
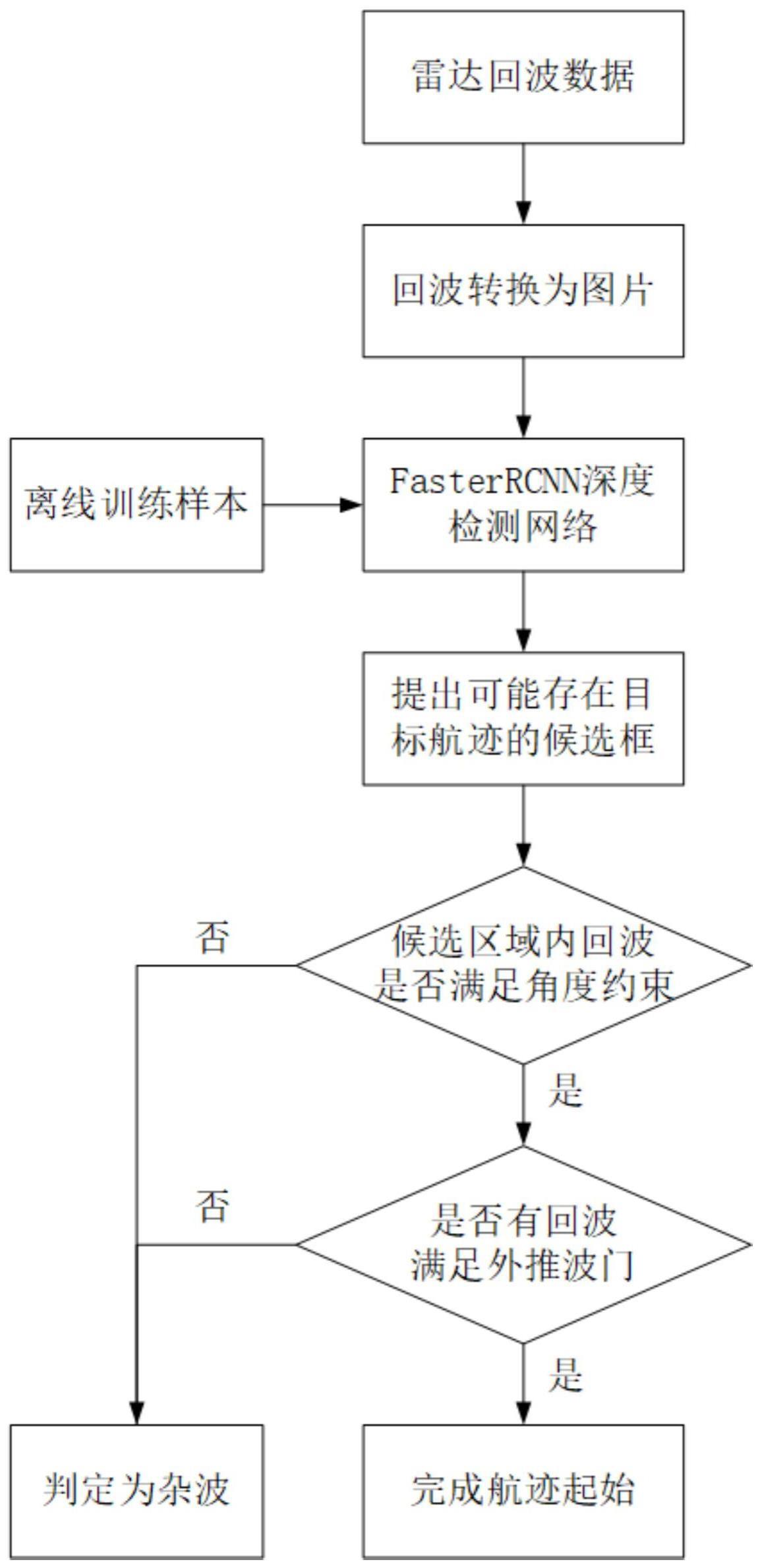
2、本发明采用以下技术方案:一种基于规则与fasterrcnn模型联合的航迹起始方法,包括以下步骤:
3、获取n个连续时刻的雷达回波信息;
4、根据雷达回波信息生成雷达回波图像;
5、利用fasterrcnn对雷达回波图像进行检测,得到若干个候选区域;
6、对每个候选区域中的回波点信息依次进行夹角角度约束判断和滤波预测判断,得到航迹起始信息。
7、进一步地,根据雷达回波信息生成雷达回波图像包括:
8、根据雷达视域探测范围确定作为雷达回波图像的边长;
9、基于边长对雷达回波信息进行压缩并绘制到雷达回波图像中;其中,不同时刻的雷达回波信息具有不同的颜色。
10、进一步地,对每个候选区域中的回波点信息进行夹角角度约束判断包括:
11、根据n时刻回波点对应的像素点与n+1时刻回波点对应的像素点生成第一向量,n∈n、n≠1且n≠n;
12、根据n时刻回波点对应的像素点与n+2时刻回波点对应的像素点生成第二向量;
13、计算第一向量和第二向量的夹角;
14、当夹角小于等于角度约束阈值时,继续进行滤波预测判断。
15、进一步地,当夹角大于角度约束阈值时,删除候选区域中的回波点。
16、进一步地,对每个候选区域中的回波点信息进行滤波预测判断包括:
17、以n个连续时刻中的非首尾回波点对应的像素点集合为已知量,进行向前或向后卡尔曼滤波,得到预测首尾回波点对应的像素点所在区域;
18、当预测首尾回波点对应的像素点所在区域包含了首尾回波点对应的像素点,将n个连续时刻回波点对应的像素点集合作为航迹起始。
19、进一步地,当预测首尾回波点对应的像素点所在区域未包含首尾回波点对应的像素点时,删除候选区域中的回波点。
20、进一步地,进行向前或向后卡尔曼滤波包括:
21、以n个连续时刻中的非首尾回波点对应的像素点的均值作为初始中间时刻状态,并在n个连续时刻中的非首尾回波点对应的像素点中选择前一时刻回波和后一时刻回波作为关联量测;
22、根据初始中间时刻状态和前一时刻回波进行前向滤波,得到初始时刻状态预测点对应的像素点,基于初始时刻状态预测点对应的像素点确定初始时刻像素点区域;
23、根据初始中间时刻状态和后一时刻回波进行后向滤波,得到最终时刻状态预测点对应的像素点,基于最终时刻状态预测点对应的像素点确定最终时刻像素点区域。
24、进一步地,基于初始时刻状态预测点对应的像素点确定初始时刻像素点区域包括:
25、以初始时刻状态预测点对应的像素点为中心,生成初始时刻像素点区域。
26、进一步地,对fasterrcnn进行训练时:
27、在作为训练样本的雷达回波图像中,航迹起始标注框大于航迹轨迹。
28、本发明的另一种技术方案:一种基于规则与fasterrcnn模型联合的航迹起始装置,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述的一种基于规则与fasterrcnn模型联合的航迹起始方法。
29、本发明的有益效果是:本发明根据雷达回波信息生成雷达回波图像,再结合fasterrcnn对雷达回波图像进行检测,可以利用fasterrcnn图像处理能力,有效提取可能存在航迹的候选框,最后结合角度约束合滤波预测判断对候选框进行筛选,兼顾顺序处理和批处理方法的优点,实现降低虚假起始率,提高目标航迹起始的性能。
技术特征:
1.一种基于规则与fasterrcnn模型联合的航迹起始方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种基于规则与fasterrcnn模型联合的航迹起始方法,其特征在于,根据所述雷达回波信息生成雷达回波图像包括:
3.如权利要求2所述的一种基于规则与fasterrcnn模型联合的航迹起始方法,其特征在于,对每个所述候选区域中的回波点信息进行夹角角度约束判断包括:
4.如权利要求3所述的一种基于规则与fasterrcnn模型联合的航迹起始方法,其特征在于,当所述夹角大于角度约束阈值时,删除所述候选区域中的回波点。
5.如权利要求2-4任一所述的一种基于规则与fasterrcnn模型联合的航迹起始方法,其特征在于,对每个所述候选区域中的回波点信息进行滤波预测判断包括:
6.如权利要求5所述的一种基于规则与fasterrcnn模型联合的航迹起始方法,其特征在于,当预测首尾回波点对应的像素点所在区域未包含首尾回波点对应的像素点时,删除所述候选区域中的回波点。
7.如权利要求6所述的一种基于规则与fasterrcnn模型联合的航迹起始方法,其特征在于,进行向前或向后卡尔曼滤波包括:
8.如权利要求7所述的一种基于规则与fasterrcnn模型联合的航迹起始方法,其特征在于,基于初始时刻状态预测点对应的像素点确定初始时刻像素点区域包括:
9.如权利要求6-8任一所述的一种基于规则与fasterrcnn模型联合的航迹起始方法,其特征在于,对所述fasterrcnn进行训练时:
10.一种基于规则与fasterrcnn模型联合的航迹起始装置,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,其特征在于,处理器执行计算机程序时实现权利要求1-9任一所述的一种基于规则与fasterrcnn模型联合的航迹起始方法。
技术总结
本发明公开了一种基于规则与FasterRCNN模型联合的航迹起始方法,获取N个连续时刻的雷达回波信息;根据雷达回波信息生成雷达回波图像;利用FasterRCNN对雷达回波图像进行检测,得到若干个候选区域;对每个候选区域中的回波点信息依次进行夹角角度约束判断和滤波预测判断,得到航迹起始信息;本发明根据雷达回波信息生成雷达回波图像,再结合FasterRCNN对雷达回波图像进行检测,可以利用FasterRCNN图像处理能力,有效提取可能存在航迹的候选框,最后结合角度约束合滤波预测判断对候选框进行筛选,兼顾顺序处理和批处理方法的优点,实现降低虚假起始率,提高目标航迹起始的性能。
技术研发人员:刘准钆,王增科,杨衍波,徐林峰
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!